#include <arbitrator.hpp>
Public Member Functions | |
| Arbitrator (std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > nh, std::shared_ptr< ArbitratorStateMachine > sm, std::shared_ptr< CapabilitiesInterface > ci, std::shared_ptr< PlanningStrategy > planning_strategy, rclcpp::Duration min_plan_duration, double planning_period, carma_wm::WorldModelConstPtr wm) | |
| Constructor for arbitrator class taking in dependencies via dependency injection. More... | |
| void | run () |
| Begin the operation of the arbitrator. More... | |
| void | twist_cb (geometry_msgs::msg::TwistStamped::UniquePtr msg) |
| Callback for the twist subscriber, which will store latest twist locally. More... | |
| void | bumper_pose_cb () |
| Callback for the front bumper pose transform. More... | |
| void | initializeBumperTransformLookup () |
| Initialize transform Lookup from front bumper to map. More... | |
Protected Member Functions | |
| void | initial_state () |
| Function to be executed during the initial state of the Arbitrator. More... | |
| void | planning_state () |
| Function to be called when the Arbitrator begins planning. More... | |
| void | waiting_state () |
| Function to be executed when the Arbitrator has finished planning and is awaiting another planning cycle. More... | |
| void | paused_state () |
| Function to be executed when the Arbitrator is not planning but also not awaiting a new plan cycle. More... | |
| void | shutdown_state () |
| Function to be executed when the Arbitrator is to clean up and shutdown. More... | |
| void | guidance_state_cb (carma_planning_msgs::msg::GuidanceState::UniquePtr msg) |
| Callback for receiving Guidance state machine updates. More... | |
Private Attributes | |
| VehicleState | vehicle_state_ |
| std::shared_ptr< ArbitratorStateMachine > | sm_ |
| carma_ros2_utils::PubPtr< carma_planning_msgs::msg::ManeuverPlan > | final_plan_pub_ |
| carma_ros2_utils::SubPtr< carma_planning_msgs::msg::GuidanceState > | guidance_state_sub_ |
| std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | nh_ |
| rclcpp::Duration | min_plan_duration_ |
| rclcpp::Duration | time_between_plans_ |
| rclcpp::Time | next_planning_process_start_ |
| std::shared_ptr< CapabilitiesInterface > | capabilities_interface_ |
| std::shared_ptr< PlanningStrategy > | planning_strategy_ |
| bool | initialized_ |
| carma_wm::WorldModelConstPtr | wm_ |
| geometry_msgs::msg::TransformStamped | tf_ |
| tf2_ros::Buffer | tf2_buffer_ |
| std::unique_ptr< tf2_ros::TransformListener > | tf2_listener_ |
| tf2::Stamped< tf2::Transform > | bumper_transform_ |
| bool | planning_in_progress_ = false |
| carma_planning_msgs::msg::GuidanceState::_state_type | previous_guidance_state_ |
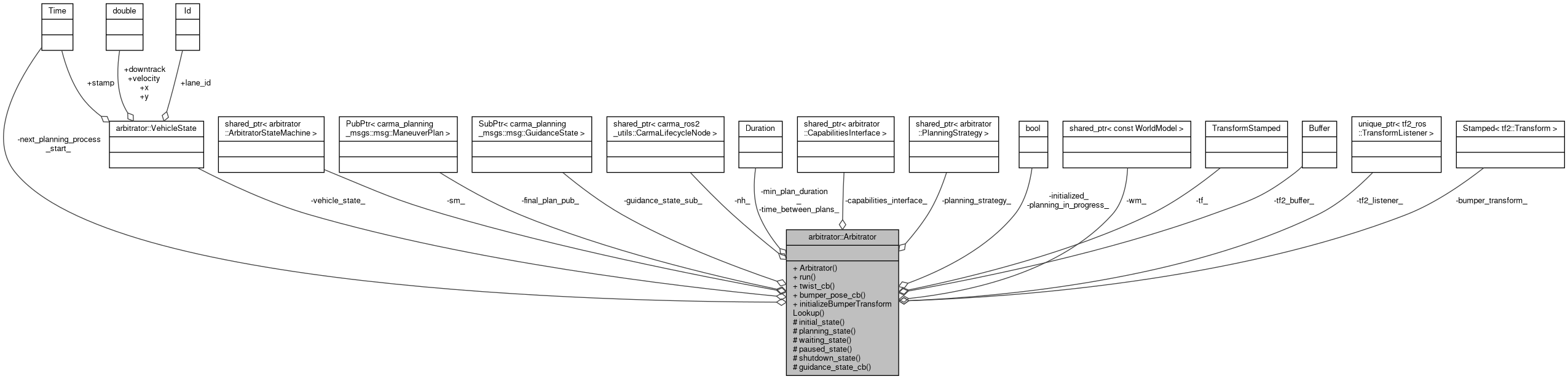
Detailed Description
Primary work class for the Arbitrator package
Governs the interactions of plugins during the maneuver planning phase of the CARMA planning process. Utilizes a generic planning interface to allow for reconfiguration with other paradigms in the future.
Definition at line 71 of file arbitrator.hpp.
Constructor & Destructor Documentation
◆ Arbitrator()
|
inline |
Constructor for arbitrator class taking in dependencies via dependency injection.
- Parameters
-
nh A CarmaLifecycleNode node pointer sm An ArbitratorStateMachine instance for regulating the states of the Arbitrator ci A CapabilitiesInterface for querying plugins planning_strategy A planning strategy implementation for generating plans min_plan_duration The minimum acceptable length of a plan planning_frequency The frequency at which to generate high-level plans when engaged wm pointer to an inialized world model.
Definition at line 84 of file arbitrator.hpp.
Member Function Documentation
◆ bumper_pose_cb()
| void arbitrator::Arbitrator::bumper_pose_cb | ( | ) |
Callback for the front bumper pose transform.
Definition at line 187 of file arbitrator.cpp.
References bumper_transform_, arbitrator::VehicleState::downtrack, arbitrator::VehicleState::lane_id, nh_, arbitrator::VehicleState::stamp, tf2_buffer_, tf_, vehicle_state_, wm_, arbitrator::VehicleState::x, and arbitrator::VehicleState::y.
◆ guidance_state_cb()
|
protected |
Callback for receiving Guidance state machine updates.
- Parameters
-
msg The new GuidanceState message
Definition at line 67 of file arbitrator.cpp.
References lightbar_manager::ACTIVE, arbitrator::ARBITRATOR_PAUSED, arbitrator::ARBITRATOR_RESUMED, lightbar_manager::ENGAGED, port_drayage_plugin::INACTIVE, arbitrator::INITIAL, nh_, arbitrator::PAUSED, arbitrator::PLANNING, previous_guidance_state_, arbitrator::SHUTDOWN, sm_, arbitrator::SYSTEM_SHUTDOWN_INITIATED, arbitrator::SYSTEM_STARTUP_COMPLETE, and arbitrator::WAITING.
Referenced by initial_state().

◆ initial_state()
|
protected |
Function to be executed during the initial state of the Arbitrator.
Definition at line 121 of file arbitrator.cpp.
References final_plan_pub_, guidance_state_cb(), guidance_state_sub_, initialized_, and nh_.
Referenced by run().


◆ initializeBumperTransformLookup()
| void arbitrator::Arbitrator::initializeBumperTransformLookup | ( | ) |
Initialize transform Lookup from front bumper to map.
Definition at line 228 of file arbitrator.cpp.
References tf2_buffer_, and tf2_listener_.
◆ paused_state()
|
protected |
Function to be executed when the Arbitrator is not planning but also not awaiting a new plan cycle.
Definition at line 176 of file arbitrator.cpp.
Referenced by run().

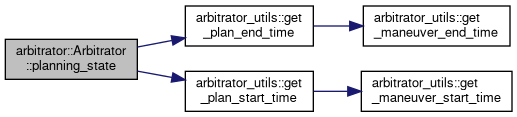
◆ planning_state()
|
protected |
Function to be called when the Arbitrator begins planning.
Definition at line 136 of file arbitrator.cpp.
References final_plan_pub_, arbitrator_utils::get_plan_end_time(), arbitrator_utils::get_plan_start_time(), min_plan_duration_, next_planning_process_start_, nh_, arbitrator::PLANNING_COMPLETE, planning_strategy_, sm_, time_between_plans_, and vehicle_state_.
Referenced by run().

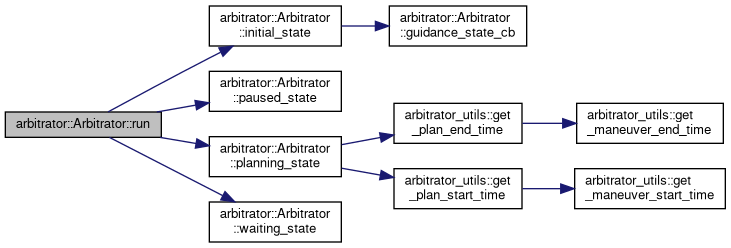
◆ run()
| void arbitrator::Arbitrator::run | ( | ) |
Begin the operation of the arbitrator.
Loops internally via rclcpp::Duration sleeps and spins
Definition at line 27 of file arbitrator.cpp.
References arbitrator::INITIAL, initial_state(), nh_, arbitrator::PAUSED, paused_state(), arbitrator::PLANNING, planning_in_progress_, planning_state(), arbitrator::SHUTDOWN, sm_, arbitrator::WAITING, and waiting_state().
◆ shutdown_state()
|
protected |
Function to be executed when the Arbitrator is to clean up and shutdown.
Definition at line 181 of file arbitrator.cpp.
References nh_.
◆ twist_cb()
| void arbitrator::Arbitrator::twist_cb | ( | geometry_msgs::msg::TwistStamped::UniquePtr | msg | ) |
Callback for the twist subscriber, which will store latest twist locally.
- Parameters
-
msg Latest twist message
Definition at line 223 of file arbitrator.cpp.
References vehicle_state_, and arbitrator::VehicleState::velocity.
Referenced by arbitrator::ArbitratorNode::handle_on_configure().

◆ waiting_state()
|
protected |
Function to be executed when the Arbitrator has finished planning and is awaiting another planning cycle.
Definition at line 171 of file arbitrator.cpp.
References arbitrator::PLANNING_TIMER_TRIGGER, and sm_.
Referenced by run().

Member Data Documentation
◆ bumper_transform_
|
private |
Definition at line 179 of file arbitrator.hpp.
Referenced by bumper_pose_cb().
◆ capabilities_interface_
|
private |
Definition at line 169 of file arbitrator.hpp.
◆ final_plan_pub_
|
private |
Definition at line 163 of file arbitrator.hpp.
Referenced by initial_state(), and planning_state().
◆ guidance_state_sub_
|
private |
Definition at line 164 of file arbitrator.hpp.
Referenced by initial_state().
◆ initialized_
|
private |
Definition at line 171 of file arbitrator.hpp.
Referenced by initial_state().
◆ min_plan_duration_
|
private |
Definition at line 166 of file arbitrator.hpp.
Referenced by planning_state().
◆ next_planning_process_start_
|
private |
Definition at line 168 of file arbitrator.hpp.
Referenced by planning_state().
◆ nh_
|
private |
Definition at line 165 of file arbitrator.hpp.
Referenced by bumper_pose_cb(), guidance_state_cb(), initial_state(), planning_state(), run(), and shutdown_state().
◆ planning_in_progress_
|
private |
Definition at line 180 of file arbitrator.hpp.
Referenced by run().
◆ planning_strategy_
|
private |
Definition at line 170 of file arbitrator.hpp.
Referenced by planning_state().
◆ previous_guidance_state_
|
private |
Definition at line 181 of file arbitrator.hpp.
Referenced by guidance_state_cb().
◆ sm_
|
private |
Definition at line 162 of file arbitrator.hpp.
Referenced by guidance_state_cb(), planning_state(), run(), and waiting_state().
◆ tf2_buffer_
|
private |
Definition at line 176 of file arbitrator.hpp.
Referenced by bumper_pose_cb(), and initializeBumperTransformLookup().
◆ tf2_listener_
|
private |
Definition at line 177 of file arbitrator.hpp.
Referenced by initializeBumperTransformLookup().
◆ tf_
|
private |
Definition at line 174 of file arbitrator.hpp.
Referenced by bumper_pose_cb().
◆ time_between_plans_
|
private |
Definition at line 167 of file arbitrator.hpp.
Referenced by planning_state().
◆ vehicle_state_
|
private |
Definition at line 160 of file arbitrator.hpp.
Referenced by bumper_pose_cb(), planning_state(), and twist_cb().
◆ wm_
|
private |
Definition at line 172 of file arbitrator.hpp.
Referenced by bumper_pose_cb().
The documentation for this class was generated from the following files:
- arbitrator/include/arbitrator.hpp
- arbitrator/src/arbitrator.cpp