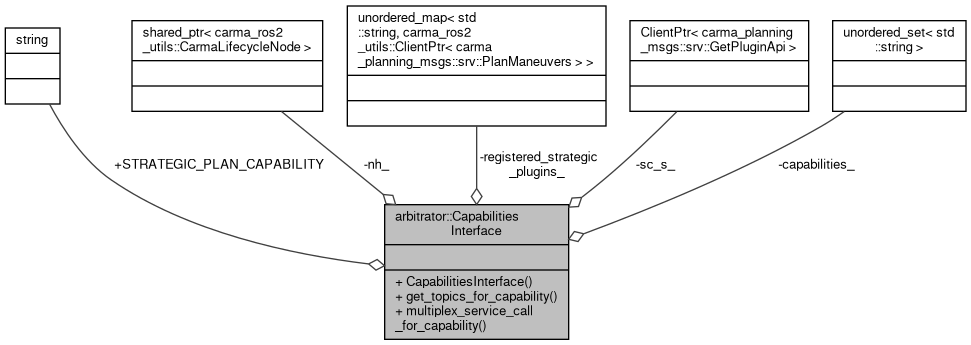
Generic interface for interacting with Plugins via their capabilities instead of directly by their topics. More...
#include <capabilities_interface.hpp>
Public Member Functions | |
| CapabilitiesInterface (std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > nh) | |
| Constructor for Capabilities interface. More... | |
| std::vector< std::string > | get_topics_for_capability (const std::string &query_string) |
| Initialize the Capabilities interface by querying the Health Monitor node and processing the plugins that are returned. More... | |
| template<typename MSrvReq , typename MSrvRes > | |
| std::map< std::string, std::shared_ptr< MSrvRes > > | multiplex_service_call_for_capability (const std::string &query_string, std::shared_ptr< MSrvReq > msg) |
| Template function for calling all nodes which respond to a service associated with a particular capability. Will send the service request to all nodes and aggregate the responses. More... | |
Static Public Attributes | |
| static const std::string | STRATEGIC_PLAN_CAPABILITY = "strategic_plan/plan_maneuvers" |
Private Attributes | |
| std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | nh_ |
| std::unordered_map< std::string, carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanManeuvers > > | registered_strategic_plugins_ |
| carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::GetPluginApi > | sc_s_ |
| std::unordered_set< std::string > | capabilities_ |
Detailed Description
Generic interface for interacting with Plugins via their capabilities instead of directly by their topics.
Definition at line 38 of file capabilities_interface.hpp.
Constructor & Destructor Documentation
◆ CapabilitiesInterface()
|
inline |
Constructor for Capabilities interface.
- Parameters
-
nh A CarmaLifecycleNode pointer this interface will work with
Definition at line 45 of file capabilities_interface.hpp.
Member Function Documentation
◆ get_topics_for_capability()
| std::vector< std::string > arbitrator::CapabilitiesInterface::get_topics_for_capability | ( | const std::string & | query_string | ) |
Initialize the Capabilities interface by querying the Health Monitor node and processing the plugins that are returned.
Get the list of topics that respond to the capability specified by the query string
- Parameters
-
query_string The string name of the capability to look for
- Returns
- A list of all responding topics, if any are found.
Definition at line 26 of file capabilities_interface.cpp.
References nh_, sc_s_, STRATEGIC_PLAN_CAPABILITY, and process_bag::topics.
◆ multiplex_service_call_for_capability()
| std::map< std::string, std::shared_ptr< MSrvRes > > arbitrator::CapabilitiesInterface::multiplex_service_call_for_capability | ( | const std::string & | query_string, |
| std::shared_ptr< MSrvReq > | msg | ||
| ) |
Template function for calling all nodes which respond to a service associated with a particular capability. Will send the service request to all nodes and aggregate the responses.
- Template Parameters
-
MSrvReq The typename of the service message request MSrvRes The typename of the service message response
- Parameters
-
query_string The string name of the capability to look for The message itself to send
- Returns
- A map matching the topic name that responded -> the response
Member Data Documentation
◆ capabilities_
|
private |
Definition at line 88 of file capabilities_interface.hpp.
◆ nh_
|
private |
Definition at line 84 of file capabilities_interface.hpp.
Referenced by CapabilitiesInterface(), and get_topics_for_capability().
◆ registered_strategic_plugins_
|
private |
Definition at line 85 of file capabilities_interface.hpp.
◆ sc_s_
|
private |
Definition at line 87 of file capabilities_interface.hpp.
Referenced by CapabilitiesInterface(), and get_topics_for_capability().
◆ STRATEGIC_PLAN_CAPABILITY
|
static |
Definition at line 81 of file capabilities_interface.hpp.
Referenced by get_topics_for_capability().
The documentation for this class was generated from the following files:
- arbitrator/include/capabilities_interface.hpp
- arbitrator/src/capabilities_interface.cpp