#include <GNSSToMapConvertor.hpp>
Public Types | |
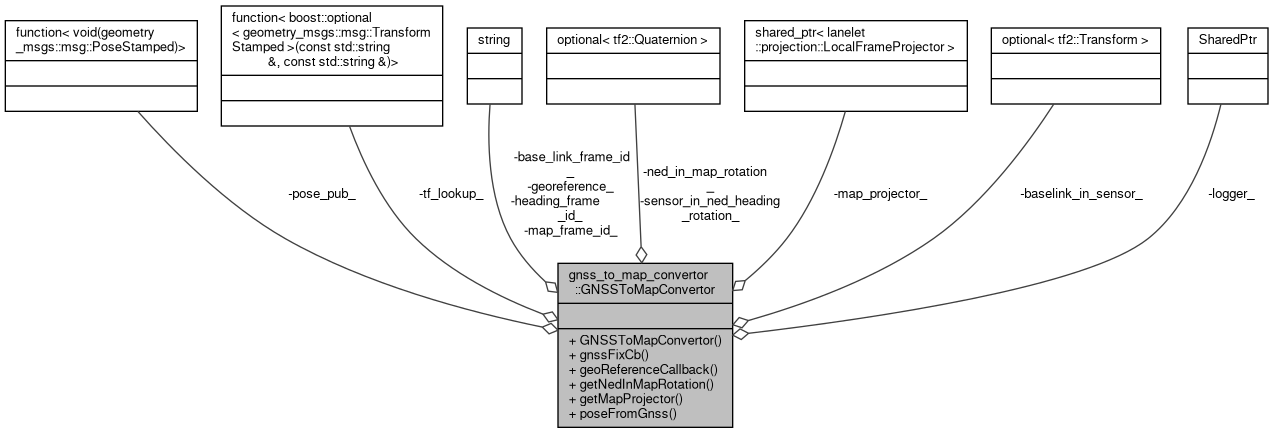
| using | PosePubCallback = std::function< void(geometry_msgs::msg::PoseStamped)> |
| using | TransformLookupCallback = std::function< boost::optional< geometry_msgs::msg::TransformStamped >(const std::string &, const std::string &)> |
Public Member Functions | |
| GNSSToMapConvertor (PosePubCallback pose_pub, TransformLookupCallback tf_lookup, std::string map_frame_id, std::string base_link_frame_id, std::string heading_frame_id, std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > nh) | |
| Constructor. More... | |
| void | gnssFixCb (gps_msgs::msg::GPSFix::UniquePtr fix_msg) |
| GNSS Fix callback which will publish a pose representing that fix in the map frame if the required transforms are available. More... | |
| void | geoReferenceCallback (std_msgs::msg::String::UniquePtr geo_ref) |
| Map georeference callback The geodetic description of the map frame should be provided to this callback as a proj library string. The frame orientation must be right handed and aligned with lat/lon however the orientation of this alignment does not matter (enu, ned, etc.) More... | |
| boost::optional< tf2::Quaternion > | getNedInMapRotation () |
| Get the rotation computed from the recieved georeference or boost::none if unset. More... | |
| std::shared_ptr< lanelet::projection::LocalFrameProjector > | getMapProjector () |
| Get the projector built from the provided georeference via the callback. More... | |
| geometry_msgs::msg::PoseWithCovarianceStamped | poseFromGnss (const tf2::Transform &baselink_in_sensor, const tf2::Quaternion &sensor_in_ned_heading_rotation, const lanelet::projection::LocalFrameProjector &projector, const tf2::Quaternion &ned_in_map_rotation, gps_msgs::msg::GPSFix fix_msg) |
| Converts a provided GNSS fix message into a pose message for the map frame describibed by the provided projector. More... | |
Private Attributes | |
| PosePubCallback | pose_pub_ |
| TransformLookupCallback | tf_lookup_ |
| std::string | map_frame_id_ |
| std::string | base_link_frame_id_ |
| std::string | heading_frame_id_ |
| std::string | georeference_ {""} |
| boost::optional< tf2::Quaternion > | ned_in_map_rotation_ |
| boost::optional< tf2::Quaternion > | sensor_in_ned_heading_rotation_ |
| std::shared_ptr< lanelet::projection::LocalFrameProjector > | map_projector_ |
| boost::optional< tf2::Transform > | baselink_in_sensor_ |
| std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | nh_ |
Detailed Description
Definition at line 50 of file GNSSToMapConvertor.hpp.
Member Typedef Documentation
◆ PosePubCallback
| using gnss_to_map_convertor::GNSSToMapConvertor::PosePubCallback = std::function<void(geometry_msgs::msg::PoseStamped)> |
Definition at line 53 of file GNSSToMapConvertor.hpp.
◆ TransformLookupCallback
| using gnss_to_map_convertor::GNSSToMapConvertor::TransformLookupCallback = std::function<boost::optional<geometry_msgs::msg::TransformStamped>(const std::string&, const std::string&)> |
Function which will return the most recent transform between the provided frames First frame is target second is source If the transform does not exist or cannot be computed the optional returns false
Definition at line 60 of file GNSSToMapConvertor.hpp.
Constructor & Destructor Documentation
◆ GNSSToMapConvertor()
| GNSSToMapConvertor::GNSSToMapConvertor | ( | PosePubCallback | pose_pub, |
| TransformLookupCallback | tf_lookup, | ||
| std::string | map_frame_id, | ||
| std::string | base_link_frame_id, | ||
| std::string | heading_frame_id, | ||
| std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | nh | ||
| ) |
Constructor.
- Parameters
-
pose_pub A function to publish a converted gps fix as a pose to the rest of the system tf_lookup A function which will lookup the most recent transform between the two provided frames map_frame_id The frame id of the frame which the output pose should be considered in base_link_frame_id The frame id of the frame which the output pose defines the position and orientation of heading_frame_id The frame id of the frame which the heading report aligns with an NED frame nh A shared pointer to the node handle which will be used to log messages and get clock in the map frame.
Definition at line 24 of file GNSSToMapConvertor.cpp.
Member Function Documentation
◆ geoReferenceCallback()
| void GNSSToMapConvertor::geoReferenceCallback | ( | std_msgs::msg::String::UniquePtr | geo_ref | ) |
Map georeference callback The geodetic description of the map frame should be provided to this callback as a proj library string. The frame orientation must be right handed and aligned with lat/lon however the orientation of this alignment does not matter (enu, ned, etc.)
- Parameters
-
geo_ref The proj string which defines the geodetic projection of the map frame which is used to convert between GNSS and Map.
Definition at line 100 of file GNSSToMapConvertor.cpp.
References georeference_, map_projector_, ned_in_map_rotation_, and nh_.
Referenced by gnss_to_map_convertor::Node::handle_on_configure().

◆ getMapProjector()
| std::shared_ptr< lanelet::projection::LocalFrameProjector > GNSSToMapConvertor::getMapProjector | ( | ) |
Get the projector built from the provided georeference via the callback.
Definition at line 127 of file GNSSToMapConvertor.cpp.
References map_projector_.
◆ getNedInMapRotation()
| boost::optional< tf2::Quaternion > GNSSToMapConvertor::getNedInMapRotation | ( | ) |
Get the rotation computed from the recieved georeference or boost::none if unset.
Definition at line 122 of file GNSSToMapConvertor.cpp.
References ned_in_map_rotation_.
◆ gnssFixCb()
| void GNSSToMapConvertor::gnssFixCb | ( | gps_msgs::msg::GPSFix::UniquePtr | fix_msg | ) |
GNSS Fix callback which will publish a pose representing that fix in the map frame if the required transforms are available.
- Parameters
-
fix_msg The message to convert to the map frame
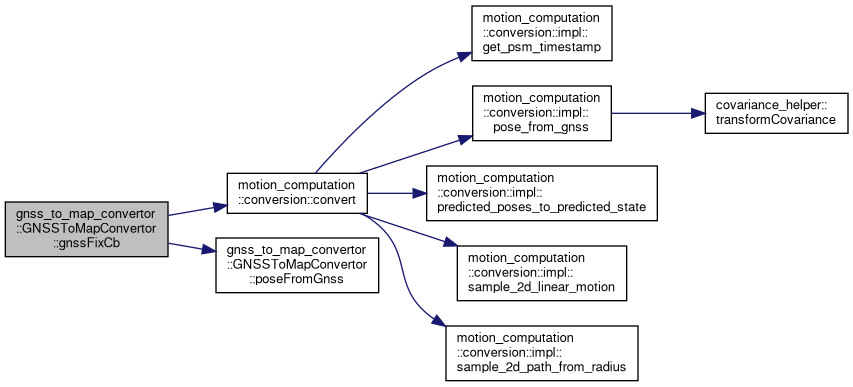
Definition at line 37 of file GNSSToMapConvertor.cpp.
References base_link_frame_id_, baselink_in_sensor_, motion_computation::conversion::convert(), heading_frame_id_, map_frame_id_, map_projector_, ned_in_map_rotation_, nh_, pose_pub_, poseFromGnss(), sensor_in_ned_heading_rotation_, and tf_lookup_.
Referenced by gnss_to_map_convertor::Node::handle_on_configure().

◆ poseFromGnss()
| geometry_msgs::msg::PoseWithCovarianceStamped GNSSToMapConvertor::poseFromGnss | ( | const tf2::Transform & | baselink_in_sensor, |
| const tf2::Quaternion & | sensor_in_ned_heading_rotation, | ||
| const lanelet::projection::LocalFrameProjector & | projector, | ||
| const tf2::Quaternion & | ned_in_map_rotation, | ||
| gps_msgs::msg::GPSFix | fix_msg | ||
| ) |
Converts a provided GNSS fix message into a pose message for the map frame describibed by the provided projector.
ASSUMPTION: This logic assumes that the orientation difference between an NED frame located at the map origin and an NED frame located at the GNSS point are sufficiently small that they can be ignored. Therefore it is assumed the heading report of the GNSS system reguardless of its poition in the map without change in its orientation will give the same result (as far as we are concered). This assumption will break down as the distance between the GNSS recieved and the map origin grows. It is recommended this distance be kept under 10km. If larger distances are required then the map origin should probably be periodically updated with a new georeference.
- Parameters
-
baselink_in_sensor A transform describing the location of the desried output frame (baselink) with respect to the GNSS sensor frame. sensor_in_ned_heading_rotation A rotation describing the orientation of the heading frame with respect to the position sensor frame projector A projector using the proj library which can convert lat/lon points into the map frame projection ned_in_map_rotation A rotation describibing the orientation of an NED frame located at the map origin with respect to the map frame. fix_msg The GNSS message to be converted into the pose in the map frame
- Returns
- A pose message describing the location and orientation of the baselink frame in the map frame. TODO handle covariance which is not currently included
Definition at line 133 of file GNSSToMapConvertor.cpp.
References osm_transform::lat, osm_transform::lon, and nh_.
Referenced by gnssFixCb().

Member Data Documentation
◆ base_link_frame_id_
|
private |
Definition at line 139 of file GNSSToMapConvertor.hpp.
Referenced by gnssFixCb().
◆ baselink_in_sensor_
|
private |
Definition at line 154 of file GNSSToMapConvertor.hpp.
Referenced by gnssFixCb().
◆ georeference_
|
private |
Definition at line 141 of file GNSSToMapConvertor.hpp.
Referenced by geoReferenceCallback().
◆ heading_frame_id_
|
private |
Definition at line 140 of file GNSSToMapConvertor.hpp.
Referenced by gnssFixCb().
◆ map_frame_id_
|
private |
Definition at line 138 of file GNSSToMapConvertor.hpp.
Referenced by gnssFixCb().
◆ map_projector_
|
private |
Definition at line 150 of file GNSSToMapConvertor.hpp.
Referenced by geoReferenceCallback(), getMapProjector(), and gnssFixCb().
◆ ned_in_map_rotation_
|
private |
Definition at line 145 of file GNSSToMapConvertor.hpp.
Referenced by geoReferenceCallback(), getNedInMapRotation(), and gnssFixCb().
◆ nh_
|
private |
Definition at line 158 of file GNSSToMapConvertor.hpp.
Referenced by geoReferenceCallback(), gnssFixCb(), and poseFromGnss().
◆ pose_pub_
|
private |
Definition at line 136 of file GNSSToMapConvertor.hpp.
Referenced by gnssFixCb().
◆ sensor_in_ned_heading_rotation_
|
private |
Definition at line 148 of file GNSSToMapConvertor.hpp.
Referenced by gnssFixCb().
◆ tf_lookup_
|
private |
Definition at line 137 of file GNSSToMapConvertor.hpp.
Referenced by gnssFixCb().
The documentation for this class was generated from the following files:
- gnss_to_map_convertor/include/gnss_to_map_convertor/GNSSToMapConvertor.hpp
- gnss_to_map_convertor/src/GNSSToMapConvertor.cpp