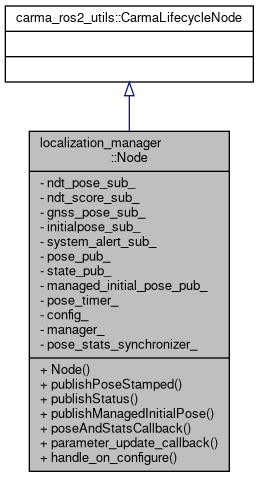
Core execution node for this package. More...
#include <localization_manager_node.hpp>
Public Member Functions | |
| Node (const rclcpp::NodeOptions &) | |
| Node constructor. More... | |
| void | publishPoseStamped (const geometry_msgs::msg::PoseStamped &msg) const |
| Callback to publish the selected pose. More... | |
| void | publishStatus (const carma_localization_msgs::msg::LocalizationStatusReport &msg) const |
| Callback to publish the provided localization status report. More... | |
| void | publishManagedInitialPose (const geometry_msgs::msg::PoseWithCovarianceStamped &msg) const |
| Callback to publish the initial pose deemed suitable to intialize NDT. More... | |
| void | poseAndStatsCallback (const geometry_msgs::msg::PoseStamped::ConstPtr pose, const autoware_msgs::msg::NDTStat::ConstPtr stats) |
| Synchronized callback for pose and stats data for usage with message_filters. Provides exception handling. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| Callback for dynamic parameter updates. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
Private Types | |
| typedef message_filters::TimeSynchronizer< geometry_msgs::msg::PoseStamped, autoware_msgs::msg::NDTStat > | TimeSynchronizer |
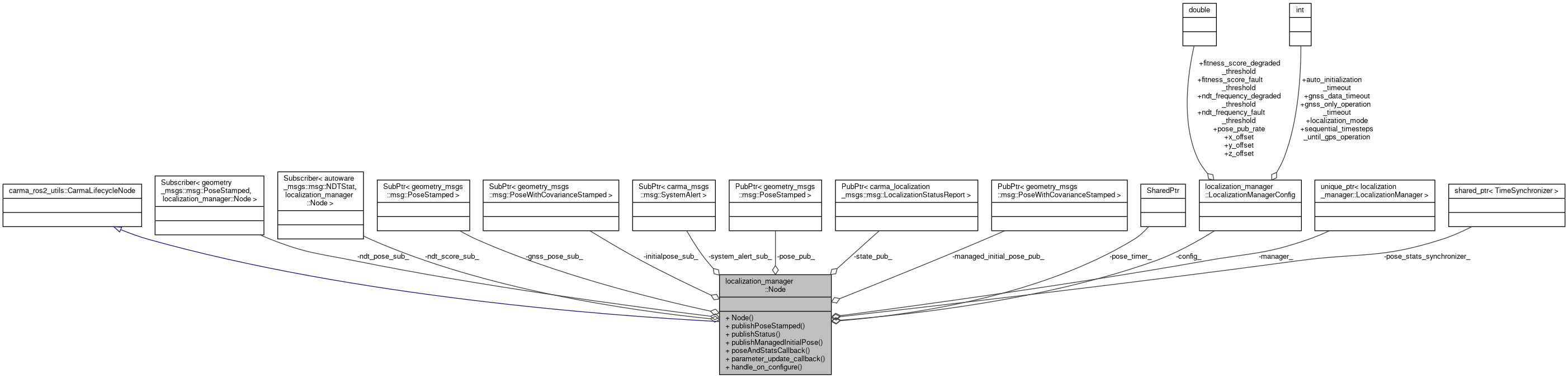
Private Attributes | |
| message_filters::Subscriber< geometry_msgs::msg::PoseStamped, Node > | ndt_pose_sub_ |
| message_filters::Subscriber< autoware_msgs::msg::NDTStat, Node > | ndt_score_sub_ |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::PoseStamped > | gnss_pose_sub_ |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::PoseWithCovarianceStamped > | initialpose_sub_ |
| carma_ros2_utils::SubPtr< carma_msgs::msg::SystemAlert > | system_alert_sub_ |
| carma_ros2_utils::PubPtr< geometry_msgs::msg::PoseStamped > | pose_pub_ |
| carma_ros2_utils::PubPtr< carma_localization_msgs::msg::LocalizationStatusReport > | state_pub_ |
| carma_ros2_utils::PubPtr< geometry_msgs::msg::PoseWithCovarianceStamped > | managed_initial_pose_pub_ |
| rclcpp::TimerBase::SharedPtr | pose_timer_ |
| LocalizationManagerConfig | config_ |
| std::unique_ptr< LocalizationManager > | manager_ |
| std::shared_ptr< TimeSynchronizer > | pose_stats_synchronizer_ |
Detailed Description
Core execution node for this package.
Definition at line 45 of file localization_manager_node.hpp.
Member Typedef Documentation
◆ TimeSynchronizer
|
private |
Definition at line 70 of file localization_manager_node.hpp.
Constructor & Destructor Documentation
◆ Node()
|
explicit |
Node constructor.
Definition at line 25 of file localization_manager_node.cpp.
References localization_manager::LocalizationManagerConfig::auto_initialization_timeout, config_, localization_manager::LocalizationManagerConfig::fitness_score_degraded_threshold, localization_manager::LocalizationManagerConfig::fitness_score_fault_threshold, localization_manager::LocalizationManagerConfig::gnss_data_timeout, localization_manager::LocalizationManagerConfig::gnss_only_operation_timeout, localization_manager::LocalizationManagerConfig::localization_mode, localization_manager::LocalizationManagerConfig::ndt_frequency_degraded_threshold, localization_manager::LocalizationManagerConfig::ndt_frequency_fault_threshold, localization_manager::LocalizationManagerConfig::pose_pub_rate, localization_manager::LocalizationManagerConfig::sequential_timesteps_until_gps_operation, localization_manager::LocalizationManagerConfig::x_offset, localization_manager::LocalizationManagerConfig::y_offset, and localization_manager::LocalizationManagerConfig::z_offset.
Member Function Documentation
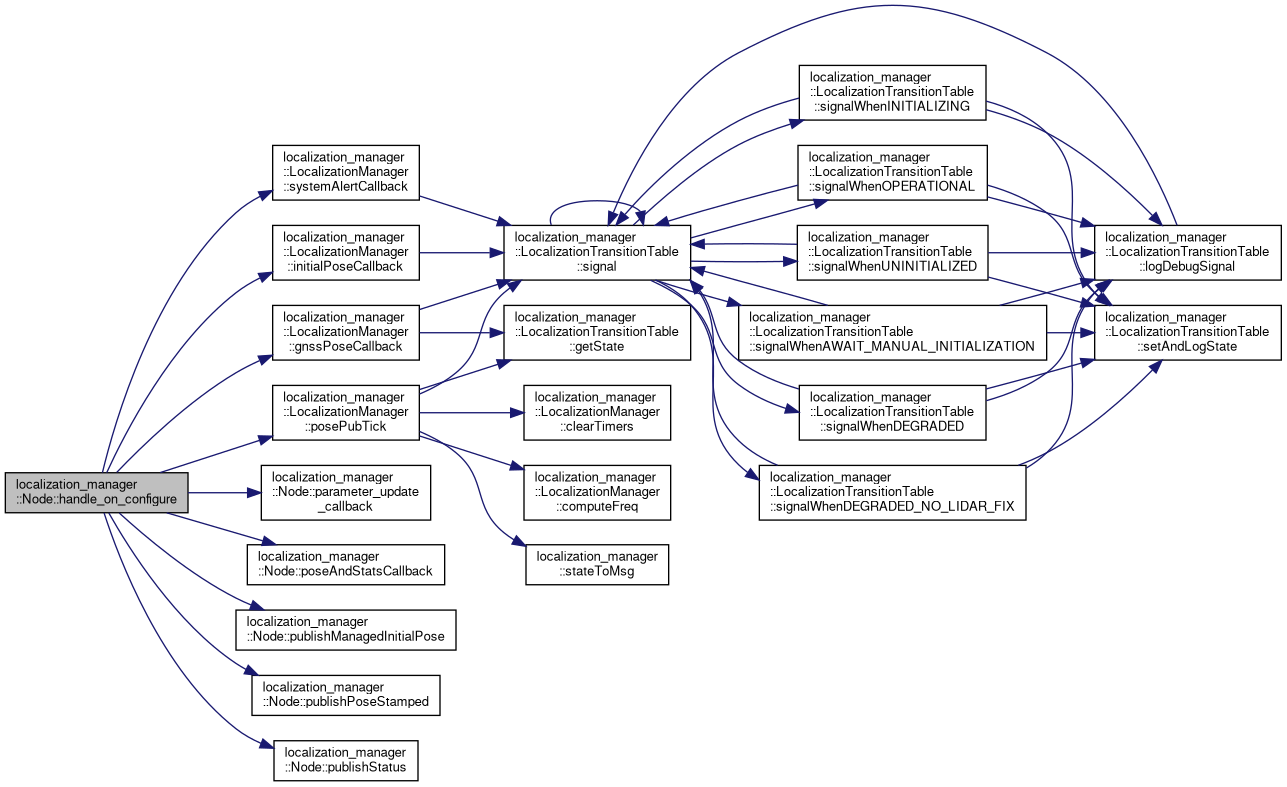
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn localization_manager::Node::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 48 of file localization_manager_node.cpp.
References localization_manager::LocalizationManagerConfig::auto_initialization_timeout, config_, localization_manager::LocalizationManagerConfig::fitness_score_degraded_threshold, localization_manager::LocalizationManagerConfig::fitness_score_fault_threshold, localization_manager::LocalizationManagerConfig::gnss_data_timeout, localization_manager::LocalizationManagerConfig::gnss_only_operation_timeout, gnss_pose_sub_, localization_manager::LocalizationManager::gnssPoseCallback(), initialpose_sub_, localization_manager::LocalizationManager::initialPoseCallback(), localization_manager::LocalizationManagerConfig::localization_mode, managed_initial_pose_pub_, manager_, localization_manager::LocalizationManagerConfig::ndt_frequency_degraded_threshold, localization_manager::LocalizationManagerConfig::ndt_frequency_fault_threshold, ndt_pose_sub_, ndt_score_sub_, parameter_update_callback(), pose_pub_, localization_manager::LocalizationManagerConfig::pose_pub_rate, pose_stats_synchronizer_, pose_timer_, poseAndStatsCallback(), localization_manager::LocalizationManager::posePubTick(), publishManagedInitialPose(), publishPoseStamped(), publishStatus(), localization_manager::LocalizationManagerConfig::sequential_timesteps_until_gps_operation, state_pub_, system_alert_sub_, localization_manager::LocalizationManager::systemAlertCallback(), localization_manager::LocalizationManagerConfig::x_offset, localization_manager::LocalizationManagerConfig::y_offset, and localization_manager::LocalizationManagerConfig::z_offset.
◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult localization_manager::Node::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
Callback for dynamic parameter updates.
Definition at line 129 of file localization_manager_node.cpp.
References localization_manager::LocalizationManagerConfig::auto_initialization_timeout, config_, localization_manager::LocalizationManagerConfig::fitness_score_degraded_threshold, localization_manager::LocalizationManagerConfig::fitness_score_fault_threshold, localization_manager::LocalizationManagerConfig::gnss_data_timeout, localization_manager::LocalizationManagerConfig::gnss_only_operation_timeout, manager_, localization_manager::LocalizationManagerConfig::ndt_frequency_degraded_threshold, localization_manager::LocalizationManagerConfig::ndt_frequency_fault_threshold, localization_manager::LocalizationManagerConfig::pose_pub_rate, localization_manager::LocalizationManagerConfig::sequential_timesteps_until_gps_operation, localization_manager::LocalizationManagerConfig::x_offset, localization_manager::LocalizationManagerConfig::y_offset, and localization_manager::LocalizationManagerConfig::z_offset.
Referenced by handle_on_configure().

◆ poseAndStatsCallback()
| void localization_manager::Node::poseAndStatsCallback | ( | const geometry_msgs::msg::PoseStamped::ConstPtr | pose, |
| const autoware_msgs::msg::NDTStat::ConstPtr | stats | ||
| ) |
Synchronized callback for pose and stats data for usage with message_filters. Provides exception handling.
- Parameters
-
pose The received pose message stats The received stats message
Definition at line 165 of file localization_manager_node.cpp.
References manager_.
Referenced by handle_on_configure().

◆ publishManagedInitialPose()
| void localization_manager::Node::publishManagedInitialPose | ( | const geometry_msgs::msg::PoseWithCovarianceStamped & | msg | ) | const |
Callback to publish the initial pose deemed suitable to intialize NDT.
- Parameters
-
msg The msg to publish
Definition at line 160 of file localization_manager_node.cpp.
References managed_initial_pose_pub_.
Referenced by handle_on_configure().

◆ publishPoseStamped()
| void localization_manager::Node::publishPoseStamped | ( | const geometry_msgs::msg::PoseStamped & | msg | ) | const |
Callback to publish the selected pose.
- Parameters
-
msg The pose to publish
Definition at line 119 of file localization_manager_node.cpp.
References pose_pub_.
Referenced by handle_on_configure().

◆ publishStatus()
| void localization_manager::Node::publishStatus | ( | const carma_localization_msgs::msg::LocalizationStatusReport & | msg | ) | const |
Callback to publish the provided localization status report.
- Parameters
-
msg The report to publish
Definition at line 124 of file localization_manager_node.cpp.
References state_pub_.
Referenced by handle_on_configure().

Member Data Documentation
◆ config_
|
private |
Definition at line 64 of file localization_manager_node.hpp.
Referenced by Node(), handle_on_configure(), and parameter_update_callback().
◆ gnss_pose_sub_
|
private |
Definition at line 51 of file localization_manager_node.hpp.
Referenced by handle_on_configure().
◆ initialpose_sub_
|
private |
Definition at line 52 of file localization_manager_node.hpp.
Referenced by handle_on_configure().
◆ managed_initial_pose_pub_
|
private |
Definition at line 58 of file localization_manager_node.hpp.
Referenced by handle_on_configure(), and publishManagedInitialPose().
◆ manager_
|
private |
Definition at line 67 of file localization_manager_node.hpp.
Referenced by handle_on_configure(), parameter_update_callback(), and poseAndStatsCallback().
◆ ndt_pose_sub_
|
private |
Definition at line 49 of file localization_manager_node.hpp.
Referenced by handle_on_configure().
◆ ndt_score_sub_
|
private |
Definition at line 50 of file localization_manager_node.hpp.
Referenced by handle_on_configure().
◆ pose_pub_
|
private |
Definition at line 56 of file localization_manager_node.hpp.
Referenced by handle_on_configure(), and publishPoseStamped().
◆ pose_stats_synchronizer_
|
private |
Definition at line 71 of file localization_manager_node.hpp.
Referenced by handle_on_configure().
◆ pose_timer_
|
private |
Definition at line 61 of file localization_manager_node.hpp.
Referenced by handle_on_configure().
◆ state_pub_
|
private |
Definition at line 57 of file localization_manager_node.hpp.
Referenced by handle_on_configure(), and publishStatus().
◆ system_alert_sub_
|
private |
Definition at line 53 of file localization_manager_node.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- localization_manager/include/localization_manager/localization_manager_node.hpp
- localization_manager/src/localization_manager_node.cpp