#include <route_state_worker.hpp>
Public Member Functions | |
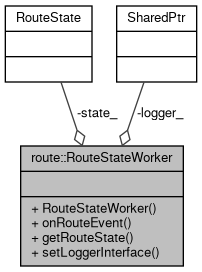
| RouteStateWorker ()=default | |
| void | onRouteEvent (RouteEvent event) |
| Process route event based on designed state machine diagram. More... | |
| RouteState | getRouteState () const |
| Get current route state machine state. More... | |
| void | setLoggerInterface (rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr logger) |
Private Attributes | |
| RouteState | state_ = RouteState::LOADING |
| rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr | logger_ |
Detailed Description
Definition at line 118 of file route_state_worker.hpp.
Constructor & Destructor Documentation
◆ RouteStateWorker()
|
default |
Member Function Documentation
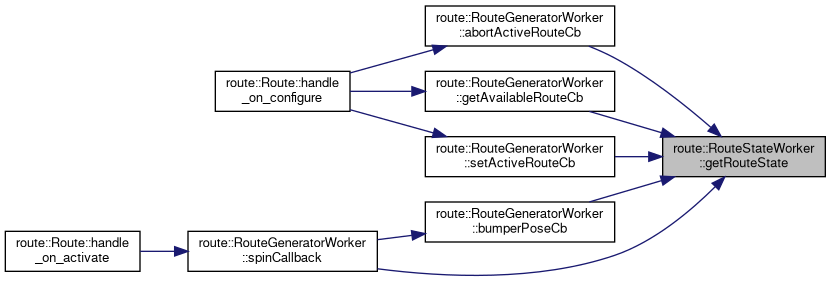
◆ getRouteState()
| RouteState route::RouteStateWorker::getRouteState | ( | ) | const |
Get current route state machine state.
Definition at line 21 of file route_state_worker.cpp.
References state_.
Referenced by route::RouteGeneratorWorker::abortActiveRouteCb(), route::RouteGeneratorWorker::bumperPoseCb(), route::RouteGeneratorWorker::getAvailableRouteCb(), route::RouteGeneratorWorker::setActiveRouteCb(), and route::RouteGeneratorWorker::spinCallback().
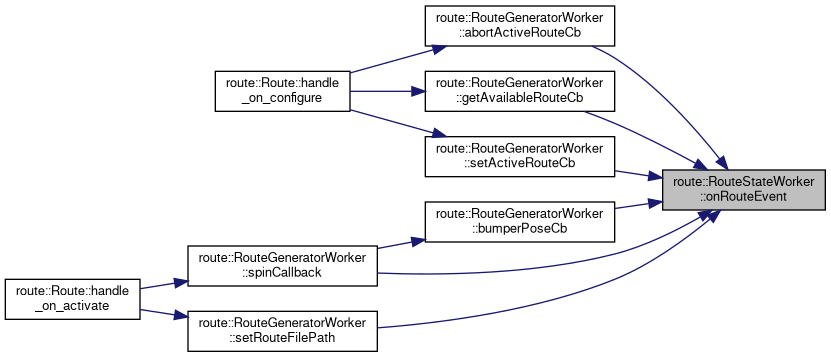
◆ onRouteEvent()
| void route::RouteStateWorker::onRouteEvent | ( | RouteEvent | event | ) |
Process route event based on designed state machine diagram.
- Parameters
-
event Incoming route event
Definition at line 25 of file route_state_worker.cpp.
References route::FOLLOWING, route::LOADING, logger_, route::ROUTE_ABORTED, route::ROUTE_COMPLETED, route::ROUTE_DEPARTED, route::ROUTE_GEN_FAILED, route::ROUTE_INVALIDATION, route::ROUTE_LOADED, route::ROUTE_SELECTED, route::ROUTE_STARTED, route::ROUTING, route::SELECTION, state_, and carma_cooperative_perception::to_string().
Referenced by route::RouteGeneratorWorker::abortActiveRouteCb(), route::RouteGeneratorWorker::bumperPoseCb(), route::RouteGeneratorWorker::getAvailableRouteCb(), route::RouteGeneratorWorker::setActiveRouteCb(), route::RouteGeneratorWorker::setRouteFilePath(), and route::RouteGeneratorWorker::spinCallback().

◆ setLoggerInterface()
| void route::RouteStateWorker::setLoggerInterface | ( | rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr | logger | ) |
Definition at line 73 of file route_state_worker.cpp.
References logger_.
Referenced by route::RouteGeneratorWorker::setLoggerInterface().

Member Data Documentation
◆ logger_
|
private |
Definition at line 143 of file route_state_worker.hpp.
Referenced by onRouteEvent(), and setLoggerInterface().
◆ state_
|
private |
Definition at line 140 of file route_state_worker.hpp.
Referenced by getRouteState(), and onRouteEvent().
The documentation for this class was generated from the following files:
- route/include/route/route_state_worker.hpp
- route/src/route_state_worker.cpp