platooning_control_worker.hpp File Reference
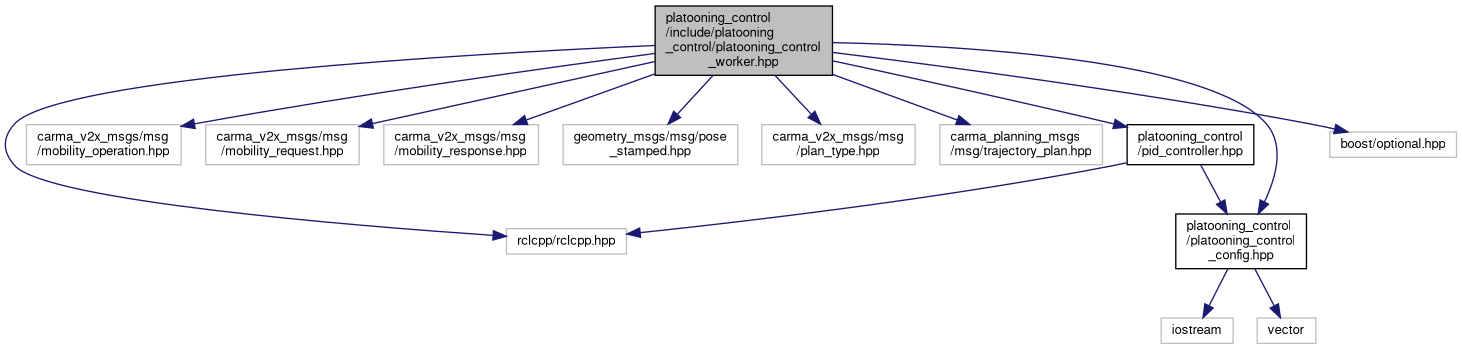
#include <rclcpp/rclcpp.hpp>#include <carma_v2x_msgs/msg/mobility_operation.hpp>#include <carma_v2x_msgs/msg/mobility_request.hpp>#include <carma_v2x_msgs/msg/mobility_response.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <carma_v2x_msgs/msg/plan_type.hpp>#include <carma_planning_msgs/msg/trajectory_plan.hpp>#include "platooning_control/pid_controller.hpp"#include "platooning_control/platooning_control_config.hpp"#include <boost/optional.hpp>
Include dependency graph for platooning_control_worker.hpp:
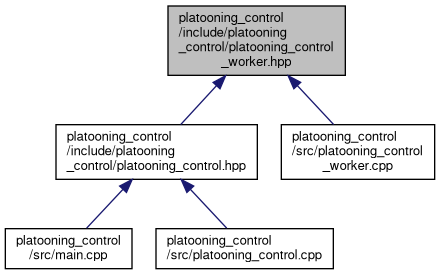
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | platooning_control::PlatoonLeaderInfo |
| Platoon Leader Struct. More... | |
| class | platooning_control::PlatooningControlWorker |
| This is the worker class for platoon controller. It is responsible for generating and smoothing the speed and steering control commands from trajectory points. More... | |
Namespaces | |
| namespace | platooning_control |