trajectory_visualizer.hpp File Reference
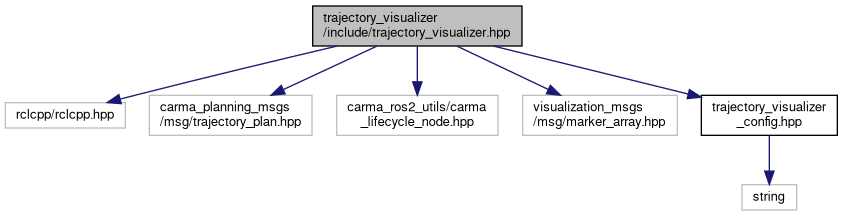
#include <rclcpp/rclcpp.hpp>#include <carma_planning_msgs/msg/trajectory_plan.hpp>#include <carma_ros2_utils/carma_lifecycle_node.hpp>#include <visualization_msgs/msg/marker_array.hpp>#include "trajectory_visualizer_config.hpp"
Include dependency graph for trajectory_visualizer.hpp:
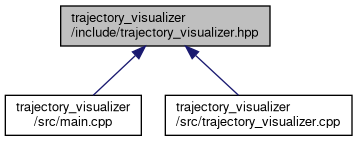
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | trajectory_visualizer::TrajectoryVisualizer |
Namespaces | |
| namespace | trajectory_visualizer |
Variables | |
| const double | trajectory_visualizer::MPH_TO_MS = 0.44704 |