#include <trajectory_visualizer.hpp>
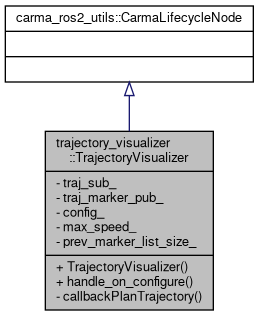
Public Member Functions | |
| TrajectoryVisualizer (const rclcpp::NodeOptions &) | |
| TrajectoryVisualizer constructor. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
Private Member Functions | |
| void | callbackPlanTrajectory (carma_planning_msgs::msg::TrajectoryPlan::UniquePtr msg) |
Private Attributes | |
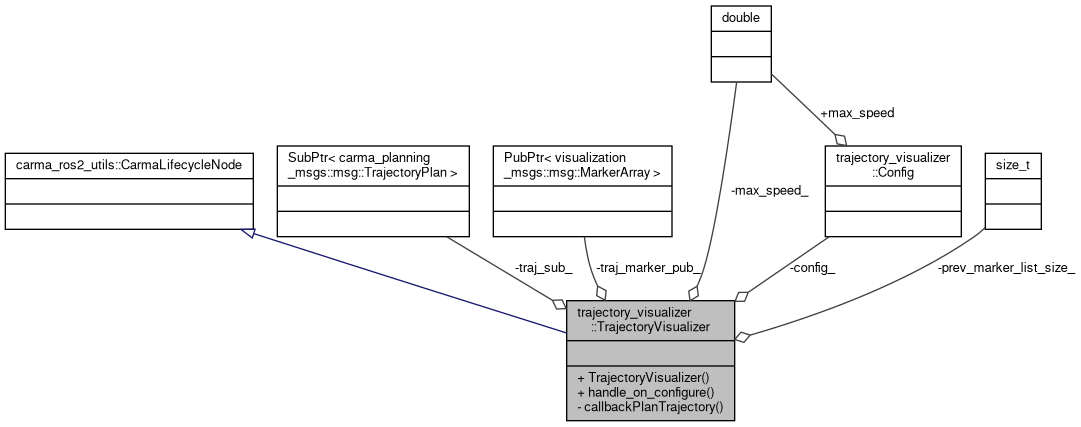
| carma_ros2_utils::SubPtr< carma_planning_msgs::msg::TrajectoryPlan > | traj_sub_ |
| carma_ros2_utils::PubPtr< visualization_msgs::msg::MarkerArray > | traj_marker_pub_ |
| Config | config_ |
| double | max_speed_ |
| size_t | prev_marker_list_size_ = 0 |
Detailed Description
Definition at line 35 of file trajectory_visualizer.hpp.
Constructor & Destructor Documentation
◆ TrajectoryVisualizer()
|
explicit |
TrajectoryVisualizer constructor.
Definition at line 26 of file trajectory_visualizer.cpp.
References config_, and trajectory_visualizer::Config::max_speed.
Member Function Documentation
◆ callbackPlanTrajectory()
|
private |
Definition at line 56 of file trajectory_visualizer.cpp.
References config_, visualize_xodr::dx, visualize_xodr::dy, process_bag::i, trajectory_visualizer::Config::max_speed, trajectory_visualizer::MPH_TO_MS, prev_marker_list_size_, traj_marker_pub_, and trajectory_visualizer::validateTime().
Referenced by handle_on_configure().


◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn trajectory_visualizer::TrajectoryVisualizer::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 36 of file trajectory_visualizer.cpp.
References callbackPlanTrajectory(), traj_marker_pub_, and traj_sub_.

Member Data Documentation
◆ config_
|
private |
Definition at line 46 of file trajectory_visualizer.hpp.
Referenced by TrajectoryVisualizer(), and callbackPlanTrajectory().
◆ max_speed_
|
private |
Definition at line 52 of file trajectory_visualizer.hpp.
◆ prev_marker_list_size_
|
private |
Definition at line 54 of file trajectory_visualizer.hpp.
Referenced by callbackPlanTrajectory().
◆ traj_marker_pub_
|
private |
Definition at line 43 of file trajectory_visualizer.hpp.
Referenced by callbackPlanTrajectory(), and handle_on_configure().
◆ traj_sub_
|
private |
Definition at line 40 of file trajectory_visualizer.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- trajectory_visualizer/include/trajectory_visualizer.hpp
- trajectory_visualizer/src/trajectory_visualizer.cpp