tree_planner.hpp File Reference
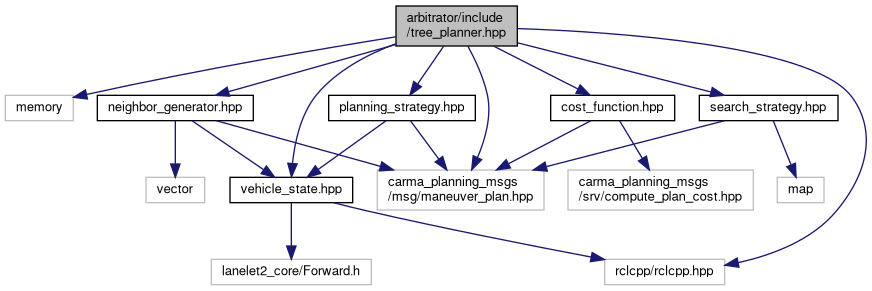
#include <memory>#include <carma_planning_msgs/msg/maneuver_plan.hpp>#include "planning_strategy.hpp"#include "cost_function.hpp"#include "neighbor_generator.hpp"#include "search_strategy.hpp"#include "vehicle_state.hpp"#include <boost/uuid/uuid.hpp>#include <boost/uuid/uuid_io.hpp>#include <boost/uuid/uuid_generators.hpp>#include <rclcpp/rclcpp.hpp>
Include dependency graph for tree_planner.hpp:
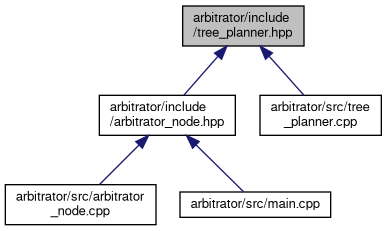
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | arbitrator::TreePlanner |
| Implementation of PlanningStrategy using a generic tree search algorithm. More... | |
Namespaces | |
| namespace | arbitrator |
Functions | |
| std::string | arbitrator::maneuver_type_to_string (uint8_t type) |
| Convert maneuver type enum to string representation. More... | |