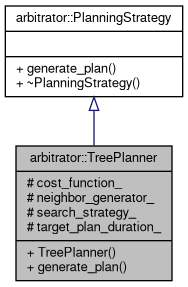
Implementation of PlanningStrategy using a generic tree search algorithm. More...
#include <tree_planner.hpp>
Public Member Functions | |
| TreePlanner (std::shared_ptr< CostFunction > cf, std::shared_ptr< NeighborGenerator > ng, std::shared_ptr< SearchStrategy > ss, rclcpp::Duration target) | |
| Tree planner constructor. More... | |
| carma_planning_msgs::msg::ManeuverPlan | generate_plan (const VehicleState &start_state) |
| Utilize the configured cost function, neighbor generator, and search strategy, to generate a plan by means of tree search. More... | |
 Public Member Functions inherited from arbitrator::PlanningStrategy Public Member Functions inherited from arbitrator::PlanningStrategy | |
| virtual carma_planning_msgs::msg::ManeuverPlan | generate_plan (const VehicleState &start_state)=0 |
| Generate a plausible maneuver plan. More... | |
| virtual | ~PlanningStrategy () |
| Virtual destructor provided for memory safety. More... | |
Protected Attributes | |
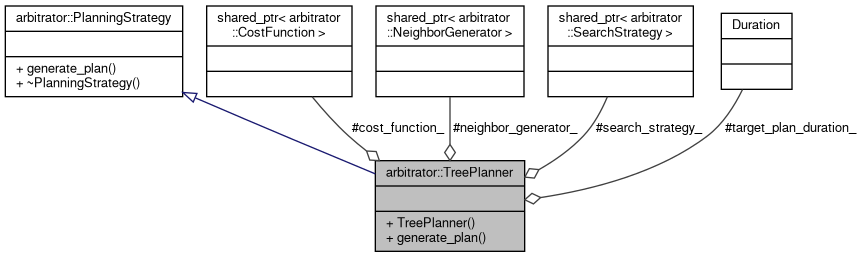
| std::shared_ptr< CostFunction > | cost_function_ |
| std::shared_ptr< NeighborGenerator > | neighbor_generator_ |
| std::shared_ptr< SearchStrategy > | search_strategy_ |
| rclcpp::Duration | target_plan_duration_ |
Detailed Description
Implementation of PlanningStrategy using a generic tree search algorithm.
The fundamental components of this tree search are individually injected into this class at construction time to allow for fine-tuning of the algorithm and ensure better testability and separation of algorithmic concerns
Definition at line 66 of file tree_planner.hpp.
Constructor & Destructor Documentation
◆ TreePlanner()
|
inline |
Tree planner constructor.
- Parameters
-
cf Shared ptr to a CostFunction implementation ng Shared ptr to a NeighborGenerator implementation ss Shared ptr to a SearchStrategy implementation target The desired duration of finished plans
Definition at line 76 of file tree_planner.hpp.
Member Function Documentation
◆ generate_plan()
|
virtual |
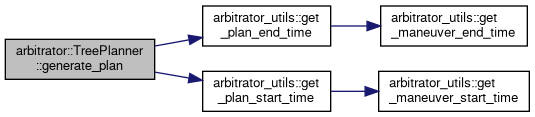
Utilize the configured cost function, neighbor generator, and search strategy, to generate a plan by means of tree search.
- Parameters
-
start_state The starting state of the vehicle to plan for
Implements arbitrator::PlanningStrategy.
Definition at line 25 of file tree_planner.cpp.
References cost_function_, arbitrator_utils::get_plan_end_time(), arbitrator_utils::get_plan_start_time(), arbitrator::maneuver_type_to_string(), neighbor_generator_, osm_transform::root, search_strategy_, target_plan_duration_, and carma_cooperative_perception::to_string().
Member Data Documentation
◆ cost_function_
|
protected |
Definition at line 93 of file tree_planner.hpp.
Referenced by generate_plan().
◆ neighbor_generator_
|
protected |
Definition at line 94 of file tree_planner.hpp.
Referenced by generate_plan().
◆ search_strategy_
|
protected |
Definition at line 95 of file tree_planner.hpp.
Referenced by generate_plan().
◆ target_plan_duration_
|
protected |
Definition at line 96 of file tree_planner.hpp.
Referenced by generate_plan().
The documentation for this class was generated from the following files:
- arbitrator/include/tree_planner.hpp
- arbitrator/src/tree_planner.cpp