GeofenceScheduler.hpp File Reference
#include <functional>#include <mutex>#include <memory>#include <unordered_map>#include <carma_wm_ctrl/Geofence.hpp>#include <carma_ros2_utils/timers/Timer.hpp>#include <carma_ros2_utils/timers/TimerFactory.hpp>#include <carma_ros2_utils/timers/ROSTimerFactory.hpp>#include <gtest/gtest_prod.h>
Include dependency graph for GeofenceScheduler.hpp:

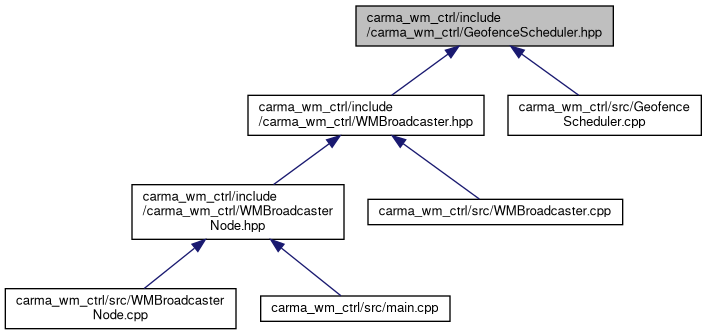
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | carma_wm_ctrl::GeofenceScheduler |
| A GeofenceScheduler is responsable for notifying the user when a geofence is active or inactive according to its schedule. More... | |
Namespaces | |
| namespace | carma_wm_ctrl |