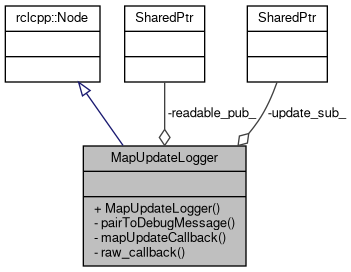
Public Member Functions | |
| MapUpdateLogger (const rclcpp::NodeOptions &options) | |
Private Member Functions | |
| carma_debug_ros2_msgs::msg::LaneletIdRegulatoryElementPair | pairToDebugMessage (const std::pair< lanelet::Id, lanelet::RegulatoryElementPtr > &id_reg_pair) |
| Converts a TrafficControl pair into the corresponding debug message type. More... | |
| carma_debug_ros2_msgs::msg::MapUpdateReadable | mapUpdateCallback (const autoware_lanelet2_msgs::msg::MapBin &update) |
| Callback for map updates that converts them to a human readable format. More... | |
| void | raw_callback (const autoware_lanelet2_msgs::msg::MapBin::SharedPtr msg) |
Private Attributes | |
| rclcpp::Publisher< carma_debug_ros2_msgs::msg::MapUpdateReadable >::SharedPtr | readable_pub_ |
| rclcpp::Subscription< autoware_lanelet2_msgs::msg::MapBin >::SharedPtr | update_sub_ |
Detailed Description
This node provides some debugging functionality for carma_wm in order to allow for inspection of map updates. The node can be run with rosrun carma_wm map_update_logger_node
The map updates can be inspected with ros2 topic echo /map_update_debug
Definition at line 47 of file MapUpdateLoggerNode.cpp.
Constructor & Destructor Documentation
◆ MapUpdateLogger()
| MapUpdateLogger::MapUpdateLogger | ( | const rclcpp::NodeOptions & | options | ) |
Definition at line 79 of file MapUpdateLoggerNode.cpp.
References raw_callback(), readable_pub_, and update_sub_.

Member Function Documentation
◆ mapUpdateCallback()
|
private |
Callback for map updates that converts them to a human readable format.
- Parameters
-
update Msg to convert
- Returns
- Returned converted message
Definition at line 162 of file MapUpdateLoggerNode.cpp.
References carma_wm::fromBinMsg(), and pairToDebugMessage().
Referenced by raw_callback().
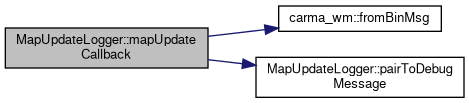

◆ pairToDebugMessage()
|
private |
Converts a TrafficControl pair into the corresponding debug message type.
- Parameters
-
id_reg_pair The pair to convert
- Returns
- A corresponding carma_debug_ros2_msgs::msg::LaneletIdRegulatoryElementPair
Definition at line 110 of file MapUpdateLoggerNode.cpp.
Referenced by mapUpdateCallback().

◆ raw_callback()
|
inlineprivate |
Definition at line 74 of file MapUpdateLoggerNode.cpp.
References mapUpdateCallback(), and readable_pub_.
Referenced by MapUpdateLogger().


Member Data Documentation
◆ readable_pub_
|
private |
Definition at line 53 of file MapUpdateLoggerNode.cpp.
Referenced by MapUpdateLogger(), and raw_callback().
◆ update_sub_
|
private |
Definition at line 54 of file MapUpdateLoggerNode.cpp.
Referenced by MapUpdateLogger().
The documentation for this class was generated from the following file:
- carma_wm/src/MapUpdateLoggerNode.cpp