The class containing the primary business logic for the BSM Generator Package. More...
#include <bsm_generator_worker.hpp>
Public Member Functions | |
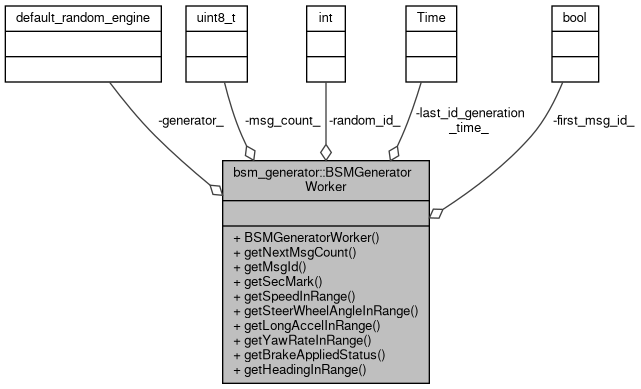
| BSMGeneratorWorker () | |
| Default Constructor for BSMGeneratorWorker. More... | |
| uint8_t | getNextMsgCount () |
| Function to increment the BSM message counter and obtain the new counter value. Counter restarts at 0 once it reaches a value of 128. More... | |
| std::vector< uint8_t > | getMsgId (const rclcpp::Time now, double secs) |
| Function to obtain the current BSM message ID. The ID is updated to a new random BSM message ID every 5 minutes. More... | |
| uint16_t | getSecMark (const rclcpp::Time now) |
| Function to obtain the 'milliseconds' mark of the provided time within the last minute. More... | |
| float | getSpeedInRange (const double speed) |
| Function to apply minimum and maximum limits to a speed value. Minimum limit is 0.0, and maximum limit is 163.8. More... | |
| float | getSteerWheelAngleInRange (const double angle) |
| Function to apply minimum and maximum limits to a steering wheel angle value. Minimum limit is -189.0, maximum limit is 189.0. More... | |
| float | getLongAccelInRange (const float accel) |
| Function to apply minimum and maximum limits to a longitudinal acceleration value. Minimum limit is -20.0, maximum limit is 20.0. More... | |
| float | getYawRateInRange (const double yaw_rate) |
| Function to apply minimum and maximum limits to a yaw rate value. Minimum limit is -327.67, maximum limit is 327.67. More... | |
| uint8_t | getBrakeAppliedStatus (const double brake) |
| Function to convert the current applied brake status to a value used within the BSM message. More... | |
| float | getHeadingInRange (const float heading) |
| Function to apply minimum and maximum limits to a vehicle heading value. Minimum limit is 0.0, maximum limit is 359.9875. More... | |
| float | getHeading (const geometry_msgs::msg::Quaternion &quaternion) |
| Function to convert a quaternion to a positive NED heading value. More... | |
Private Attributes | |
| std::default_random_engine | generator_ |
| uint8_t | msg_count_ {0} |
| int | random_id_ {0} |
| rclcpp::Time | last_id_generation_time_ |
| bool | first_msg_id_ = true |
Detailed Description
The class containing the primary business logic for the BSM Generator Package.
Definition at line 35 of file bsm_generator_worker.hpp.
Constructor & Destructor Documentation
◆ BSMGeneratorWorker()
| bsm_generator::BSMGeneratorWorker::BSMGeneratorWorker | ( | ) |
Default Constructor for BSMGeneratorWorker.
Definition at line 23 of file bsm_generator_worker.cpp.
Member Function Documentation
◆ getBrakeAppliedStatus()
| uint8_t bsm_generator::BSMGeneratorWorker::getBrakeAppliedStatus | ( | const double | brake | ) |
Function to convert the current applied brake status to a value used within the BSM message.
- Parameters
-
brake The current applied brake status
- Returns
- Converted brake status value
Definition at line 91 of file bsm_generator_worker.cpp.
◆ getHeading()
| float bsm_generator::BSMGeneratorWorker::getHeading | ( | const geometry_msgs::msg::Quaternion & | quaternion | ) |
Function to convert a quaternion to a positive NED heading value.
Definition at line 101 of file bsm_generator_worker.cpp.
◆ getHeadingInRange()
| float bsm_generator::BSMGeneratorWorker::getHeadingInRange | ( | const float | heading | ) |
Function to apply minimum and maximum limits to a vehicle heading value. Minimum limit is 0.0, maximum limit is 359.9875.
- Parameters
-
heading The current vehicle heading value
- Returns
- Vehicle heading value (minimum limit is 0.0, maximum limit is 359.9875)
Definition at line 96 of file bsm_generator_worker.cpp.
◆ getLongAccelInRange()
| float bsm_generator::BSMGeneratorWorker::getLongAccelInRange | ( | const float | accel | ) |
Function to apply minimum and maximum limits to a longitudinal acceleration value. Minimum limit is -20.0, maximum limit is 20.0.
- Parameters
-
accel The current longitudinal acceleration value
- Returns
- Longitudinal acceleration value (minimum limit is -20.0, maximum limit is 20.0)
Definition at line 81 of file bsm_generator_worker.cpp.
◆ getMsgId()
| std::vector< uint8_t > bsm_generator::BSMGeneratorWorker::getMsgId | ( | const rclcpp::Time | now, |
| double | secs | ||
| ) |
Function to obtain the current BSM message ID. The ID is updated to a new random BSM message ID every 5 minutes.
- Parameters
-
now The current time secs Id change period in sec
- Returns
- The current BSM message ID
Definition at line 36 of file bsm_generator_worker.cpp.
References first_msg_id_, generator_, process_bag::i, last_id_generation_time_, and random_id_.
◆ getNextMsgCount()
| uint8_t bsm_generator::BSMGeneratorWorker::getNextMsgCount | ( | ) |
Function to increment the BSM message counter and obtain the new counter value. Counter restarts at 0 once it reaches a value of 128.
- Returns
- The updated BSM message counter value
Definition at line 25 of file bsm_generator_worker.cpp.
References msg_count_.
◆ getSecMark()
| uint16_t bsm_generator::BSMGeneratorWorker::getSecMark | ( | const rclcpp::Time | now | ) |
Function to obtain the 'milliseconds' mark of the provided time within the last minute.
- Parameters
-
now The current time
- Returns
- The 'milliseconds' mark of the provided time within the last minute
Definition at line 66 of file bsm_generator_worker.cpp.
◆ getSpeedInRange()
| float bsm_generator::BSMGeneratorWorker::getSpeedInRange | ( | const double | speed | ) |
Function to apply minimum and maximum limits to a speed value. Minimum limit is 0.0, and maximum limit is 163.8.
- Parameters
-
speed The current vehicle speed
- Returns
- Speed value (minimum limit is 0.0, maximum limit is 163.8)
Definition at line 71 of file bsm_generator_worker.cpp.
◆ getSteerWheelAngleInRange()
| float bsm_generator::BSMGeneratorWorker::getSteerWheelAngleInRange | ( | const double | angle | ) |
Function to apply minimum and maximum limits to a steering wheel angle value. Minimum limit is -189.0, maximum limit is 189.0.
- Parameters
-
angle The current steering wheel angle
- Returns
- Steering wheel angle value (minimum limit is -189.0, maximum limit is 189.0)
Definition at line 76 of file bsm_generator_worker.cpp.
◆ getYawRateInRange()
| float bsm_generator::BSMGeneratorWorker::getYawRateInRange | ( | const double | yaw_rate | ) |
Function to apply minimum and maximum limits to a yaw rate value. Minimum limit is -327.67, maximum limit is 327.67.
- Parameters
-
yaw_rate The current yaw rate value
- Returns
- Yaw Rate value (minimum limit is -327.67, maximum limit is 327.67)
Definition at line 86 of file bsm_generator_worker.cpp.
Member Data Documentation
◆ first_msg_id_
|
private |
Definition at line 133 of file bsm_generator_worker.hpp.
Referenced by getMsgId().
◆ generator_
|
private |
Definition at line 120 of file bsm_generator_worker.hpp.
Referenced by getMsgId().
◆ last_id_generation_time_
|
private |
Definition at line 129 of file bsm_generator_worker.hpp.
Referenced by getMsgId().
◆ msg_count_
|
private |
Definition at line 123 of file bsm_generator_worker.hpp.
Referenced by getNextMsgCount().
◆ random_id_
|
private |
Definition at line 126 of file bsm_generator_worker.hpp.
Referenced by getMsgId().
The documentation for this class was generated from the following files:
- bsm_generator/include/bsm_generator/bsm_generator_worker.hpp
- bsm_generator/src/bsm_generator_worker.cpp