#include <guidance_state_machine.hpp>
Public Types | |
| enum | Signal { INITIALIZED = 0 , ACTIVATED = 1 , ENGAGE = 2 , DISENGAGED = 3 , SHUTDOWN = 4 , OVERRIDE = 5 , PARK = 6 } |
| enum | State { OFF = 0 , STARTUP = 1 , DRIVERS_READY = 2 , ACTIVE = 3 , ENGAGED = 4 , INACTIVE = 5 , ENTER_PARK = 6 } |
Public Member Functions | |
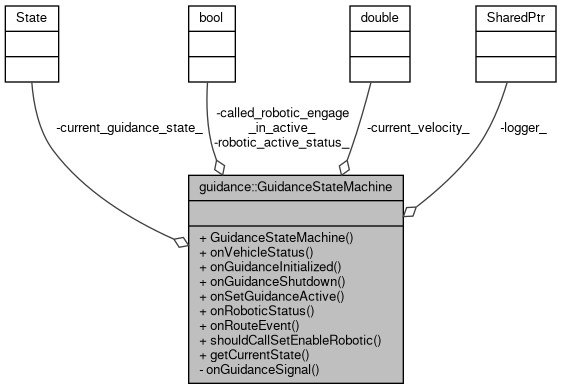
| GuidanceStateMachine (rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr logger) | |
| constructor for GuidanceStateMachine More... | |
| void | onVehicleStatus (autoware_msgs::msg::VehicleStatus::UniquePtr msg) |
| Handle vehicle status message from ROS network. More... | |
| void | onGuidanceInitialized () |
| Updates Guidance State Machine with INITIALIZED signal. More... | |
| void | onGuidanceShutdown () |
| Updates Guidance State Machine with SHUTDOWN signal. More... | |
| void | onSetGuidanceActive (bool msg) |
| Handle set_guidance_active service call from ROS network. More... | |
| void | onRoboticStatus (carma_driver_msgs::msg::RobotEnabled::UniquePtr msg) |
| Handle robotic_status message from ROS network. More... | |
| void | onRouteEvent (carma_planning_msgs::msg::RouteEvent::UniquePtr msg) |
| Handle route event message. More... | |
| bool | shouldCallSetEnableRobotic () |
| Indicate if SetEnableRobotic needs to be called in ACTIVE state. More... | |
| uint8_t | getCurrentState () |
| Get current state machine status. More... | |
Private Member Functions | |
| void | onGuidanceSignal (Signal signal) |
| Actual state machine logic driven by signal enum. More... | |
Private Attributes | |
| State | current_guidance_state_ {State::STARTUP} |
| bool | robotic_active_status_ {false} |
| bool | called_robotic_engage_in_active_ {false} |
| double | current_velocity_ = 0.0 |
| rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr | logger_ |
Detailed Description
Definition at line 28 of file guidance_state_machine.hpp.
Member Enumeration Documentation
◆ Signal
| Enumerator | |
|---|---|
| INITIALIZED | |
| ACTIVATED | |
| ENGAGE | |
| DISENGAGED | |
| SHUTDOWN | |
| OVERRIDE | |
| PARK | |
Definition at line 32 of file guidance_state_machine.hpp.
◆ State
| Enumerator | |
|---|---|
| OFF | |
| STARTUP | |
| DRIVERS_READY | |
| ACTIVE | |
| ENGAGED | |
| INACTIVE | |
| ENTER_PARK | |
Definition at line 43 of file guidance_state_machine.hpp.
Constructor & Destructor Documentation
◆ GuidanceStateMachine()
| guidance::GuidanceStateMachine::GuidanceStateMachine | ( | rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr | logger | ) |
constructor for GuidanceStateMachine
- Parameters
-
logger The logger interface that will be used by this object
Definition at line 21 of file guidance_state_machine.cpp.
Member Function Documentation
◆ getCurrentState()
| uint8_t guidance::GuidanceStateMachine::getCurrentState | ( | ) |
Get current state machine status.
Definition at line 157 of file guidance_state_machine.cpp.
References current_guidance_state_.
Referenced by guidance::GuidanceWorker::guidance_activation_cb(), and guidance::GuidanceWorker::spin_cb().

◆ onGuidanceInitialized()
| void guidance::GuidanceStateMachine::onGuidanceInitialized | ( | ) |
Updates Guidance State Machine with INITIALIZED signal.
Definition at line 103 of file guidance_state_machine.cpp.
References onGuidanceSignal().
Referenced by guidance::GuidanceWorker::handle_on_activate().


◆ onGuidanceShutdown()
| void guidance::GuidanceStateMachine::onGuidanceShutdown | ( | ) |
Updates Guidance State Machine with SHUTDOWN signal.
Definition at line 108 of file guidance_state_machine.cpp.
References onGuidanceSignal(), and arbitrator::SHUTDOWN.
Referenced by guidance::GuidanceWorker::handle_on_shutdown().


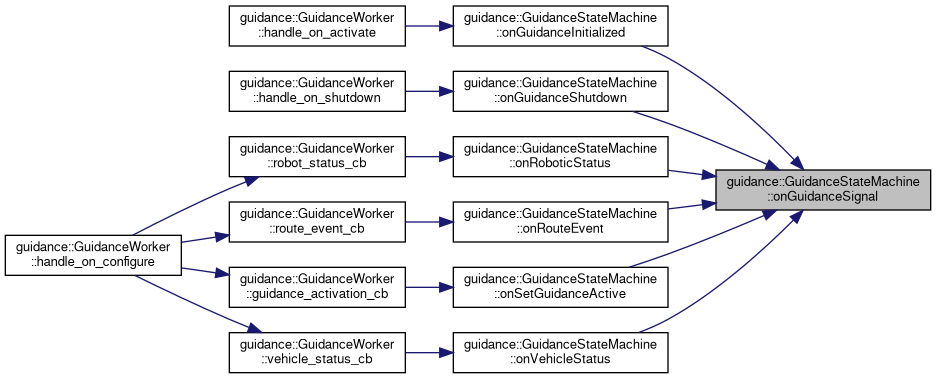
◆ onGuidanceSignal()
|
private |
Actual state machine logic driven by signal enum.
Definition at line 24 of file guidance_state_machine.cpp.
References lightbar_manager::ACTIVE, current_guidance_state_, lightbar_manager::DISENGAGED, lightbar_manager::ENGAGED, port_drayage_plugin::INACTIVE, lightbar_manager::OFF, and arbitrator::SHUTDOWN.
Referenced by onGuidanceInitialized(), onGuidanceShutdown(), onRoboticStatus(), onRouteEvent(), onSetGuidanceActive(), and onVehicleStatus().
◆ onRoboticStatus()
| void guidance::GuidanceStateMachine::onRoboticStatus | ( | carma_driver_msgs::msg::RobotEnabled::UniquePtr | msg | ) |
Handle robotic_status message from ROS network.
Definition at line 125 of file guidance_state_machine.cpp.
References onGuidanceSignal(), and robotic_active_status_.
Referenced by guidance::GuidanceWorker::robot_status_cb().


◆ onRouteEvent()
| void guidance::GuidanceStateMachine::onRouteEvent | ( | carma_planning_msgs::msg::RouteEvent::UniquePtr | msg | ) |
Handle route event message.
Definition at line 141 of file guidance_state_machine.cpp.
References current_velocity_, lightbar_manager::DISENGAGED, logger_, onGuidanceSignal(), route::ROUTE_ABORTED, route::ROUTE_COMPLETED, and route::ROUTE_DEPARTED.
Referenced by guidance::GuidanceWorker::route_event_cb().


◆ onSetGuidanceActive()
| void guidance::GuidanceStateMachine::onSetGuidanceActive | ( | bool | msg | ) |
Handle set_guidance_active service call from ROS network.
Definition at line 113 of file guidance_state_machine.cpp.
References lightbar_manager::DISENGAGED, and onGuidanceSignal().
Referenced by guidance::GuidanceWorker::guidance_activation_cb().


◆ onVehicleStatus()
| void guidance::GuidanceStateMachine::onVehicleStatus | ( | autoware_msgs::msg::VehicleStatus::UniquePtr | msg | ) |
Handle vehicle status message from ROS network.
Definition at line 88 of file guidance_state_machine.cpp.
References current_guidance_state_, current_velocity_, and onGuidanceSignal().
Referenced by guidance::GuidanceWorker::vehicle_status_cb().


◆ shouldCallSetEnableRobotic()
| bool guidance::GuidanceStateMachine::shouldCallSetEnableRobotic | ( | ) |
Indicate if SetEnableRobotic needs to be called in ACTIVE state.
Definition at line 162 of file guidance_state_machine.cpp.
References ACTIVE, called_robotic_engage_in_active_, and current_guidance_state_.
Referenced by guidance::GuidanceWorker::spin_cb().

Member Data Documentation
◆ called_robotic_engage_in_active_
|
private |
Definition at line 114 of file guidance_state_machine.hpp.
Referenced by shouldCallSetEnableRobotic().
◆ current_guidance_state_
|
private |
Definition at line 108 of file guidance_state_machine.hpp.
Referenced by getCurrentState(), onGuidanceSignal(), onVehicleStatus(), and shouldCallSetEnableRobotic().
◆ current_velocity_
|
private |
Definition at line 117 of file guidance_state_machine.hpp.
Referenced by onRouteEvent(), and onVehicleStatus().
◆ logger_
|
private |
Definition at line 120 of file guidance_state_machine.hpp.
Referenced by onRouteEvent().
◆ robotic_active_status_
|
private |
Definition at line 111 of file guidance_state_machine.hpp.
Referenced by onRoboticStatus().
The documentation for this class was generated from the following files:
- guidance/include/guidance/guidance_state_machine.hpp
- guidance/src/guidance_state_machine.cpp