Class which serves as an abstraction of a pub/sub framework. More...
#include <ROSComms.h>
Public Member Functions | |
| bool | getLatch () |
| Returns the latched status of this data stream. More... | |
| int | getQueueSize () |
| Returns the data stream queue size. More... | |
| std::string | getTopic () |
| Returns the name string (topic) associated with the data stream. More... | |
| CommTypes | getCommType () |
| returns the comms type of this object More... | |
| void | callback (T msg) |
| Callback function which is triggered to pass data into this comms abstraction. More... | |
| T | getTemplateType () |
| Returns an instance of the type this object is parameterized on. This is used for forwarding the data type. More... | |
| ROSComms () | |
| Default constructor. More... | |
| ROSComms (CommTypes ct, bool latch, int qs, std::string t) | |
| Publisher constructor. More... | |
| ROSComms (std::function< void(T)> cbf, CommTypes ct, bool latch, int qs, std::string t) | |
| Publisher constructor. More... | |
Private Attributes | |
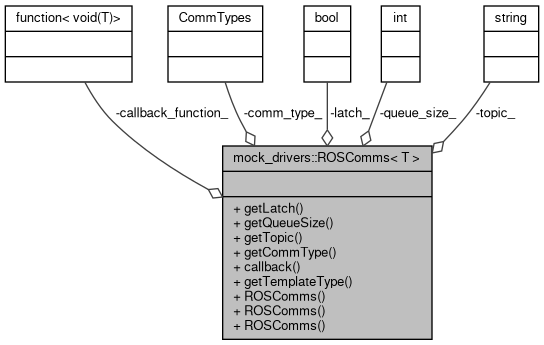
| std::function< void(T)> | callback_function_ |
| CommTypes | comm_type_ |
| bool | latch_ |
| int | queue_size_ |
| std::string | topic_ |
Detailed Description
class mock_drivers::ROSComms< T >
Class which serves as an abstraction of a pub/sub framework.
- Template Parameters
-
T Message type. This should be a base message type and does not support services. For example t = std_msgs/Float64
Definition at line 42 of file ROSComms.h.
Constructor & Destructor Documentation
◆ ROSComms() [1/3]
| mock_drivers::ROSComms< T >::ROSComms |
◆ ROSComms() [2/3]
| mock_drivers::ROSComms< T >::ROSComms | ( | CommTypes | ct, |
| bool | latch, | ||
| int | qs, | ||
| std::string | t | ||
| ) |
Publisher constructor.
Constructor for a publisher ROSComms.
- Parameters
-
ct The comms type which should be pub latch The latched status of this publication qs The queue size of this publication t The name of the topic
Definition at line 28 of file ROSComms.ipp.
◆ ROSComms() [3/3]
| mock_drivers::ROSComms< T >::ROSComms | ( | std::function< void(T)> | cbf, |
| CommTypes | ct, | ||
| bool | latch, | ||
| int | qs, | ||
| std::string | t | ||
| ) |
Publisher constructor.
Constructor for a subscriber ROSComms.
- Parameters
-
ct The comms type which should be pub latch The latched status of this publication qs The queue size of this publication t The name of the topic
Definition at line 38 of file ROSComms.ipp.
Member Function Documentation
◆ callback()
| void mock_drivers::ROSComms< T >::callback | ( | T | msg | ) |
Callback function which is triggered to pass data into this comms abstraction.
Used to call the ROSComms callback function.
- Parameters
-
msg The message to pass
Definition at line 57 of file ROSComms.ipp.
◆ getCommType()
|
inline |
returns the comms type of this object
- Returns
- Comms type enum
Definition at line 87 of file ROSComms.h.
◆ getLatch()
|
inline |
Returns the latched status of this data stream.
- Returns
- True if latched. False otherwise
Definition at line 57 of file ROSComms.h.
◆ getQueueSize()
|
inline |
Returns the data stream queue size.
- Returns
- Size of data stream queue
Definition at line 67 of file ROSComms.h.
◆ getTemplateType()
| T mock_drivers::ROSComms< T >::getTemplateType | ( | ) |
Returns an instance of the type this object is parameterized on. This is used for forwarding the data type.
- Returns
- Instance of T
◆ getTopic()
|
inline |
Returns the name string (topic) associated with the data stream.
- Returns
- Topic name
Definition at line 77 of file ROSComms.h.
Member Data Documentation
◆ callback_function_
|
private |
Definition at line 45 of file ROSComms.h.
◆ comm_type_
|
private |
Definition at line 46 of file ROSComms.h.
◆ latch_
|
private |
Definition at line 47 of file ROSComms.h.
◆ queue_size_
|
private |
Definition at line 48 of file ROSComms.h.
◆ topic_
|
private |
Definition at line 49 of file ROSComms.h.
The documentation for this class was generated from the following files:
- mock_drivers/rosbag_mock_drivers/include/rosbag_mock_drivers/ROSComms.h
- mock_drivers/rosbag_mock_drivers/include/rosbag_mock_drivers/ROSComms.ipp