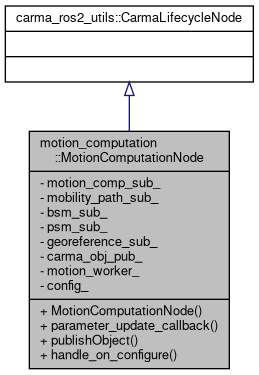
The class responsible for publishing external object predictions. More...
#include <motion_computation_node.hpp>
Public Member Functions | |
| MotionComputationNode (const rclcpp::NodeOptions &) | |
| MotionComputationNode constructor. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| Function callback for dynamic parameter updates. More... | |
| void | publishObject (const carma_perception_msgs::msg::ExternalObjectList &obj_pred_msg) const |
| Function to publish ExternalObjectList. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
Private Attributes | |
| carma_ros2_utils::SubPtr< carma_perception_msgs::msg::ExternalObjectList > | motion_comp_sub_ |
| carma_ros2_utils::SubPtr< carma_v2x_msgs::msg::MobilityPath > | mobility_path_sub_ |
| carma_ros2_utils::SubPtr< carma_v2x_msgs::msg::BSM > | bsm_sub_ |
| carma_ros2_utils::SubPtr< carma_v2x_msgs::msg::PSM > | psm_sub_ |
| carma_ros2_utils::SubPtr< std_msgs::msg::String > | georeference_sub_ |
| carma_ros2_utils::PubPtr< carma_perception_msgs::msg::ExternalObjectList > | carma_obj_pub_ |
| MotionComputationWorker | motion_worker_ |
| Config | config_ |
Detailed Description
The class responsible for publishing external object predictions.
Definition at line 39 of file motion_computation_node.hpp.
Constructor & Destructor Documentation
◆ MotionComputationNode()
|
explicit |
MotionComputationNode constructor.
Definition at line 21 of file motion_computation_node.cpp.
References config_, motion_computation::Config::cv_x_accel_noise, motion_computation::Config::cv_y_accel_noise, motion_computation::Config::enable_bsm_processing, motion_computation::Config::enable_ctrv_for_large_vehicle_obj, motion_computation::Config::enable_ctrv_for_motorcycle_obj, motion_computation::Config::enable_ctrv_for_pedestrian_obj, motion_computation::Config::enable_ctrv_for_small_vehicle_obj, motion_computation::Config::enable_ctrv_for_unknown_obj, motion_computation::Config::enable_mobility_path_processing, motion_computation::Config::enable_psm_processing, motion_computation::Config::enable_sensor_processing, motion_computation::Config::prediction_confidence_drop_rate, motion_computation::Config::prediction_period, motion_computation::Config::prediction_process_noise_max, and motion_computation::Config::prediction_time_step.
Member Function Documentation
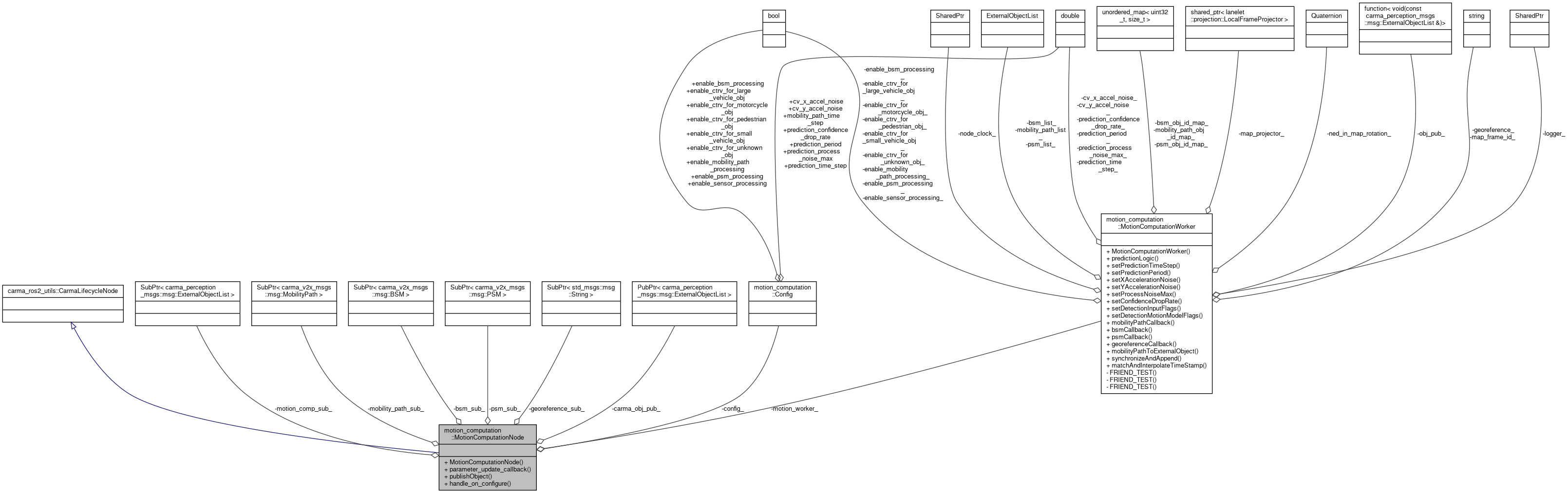
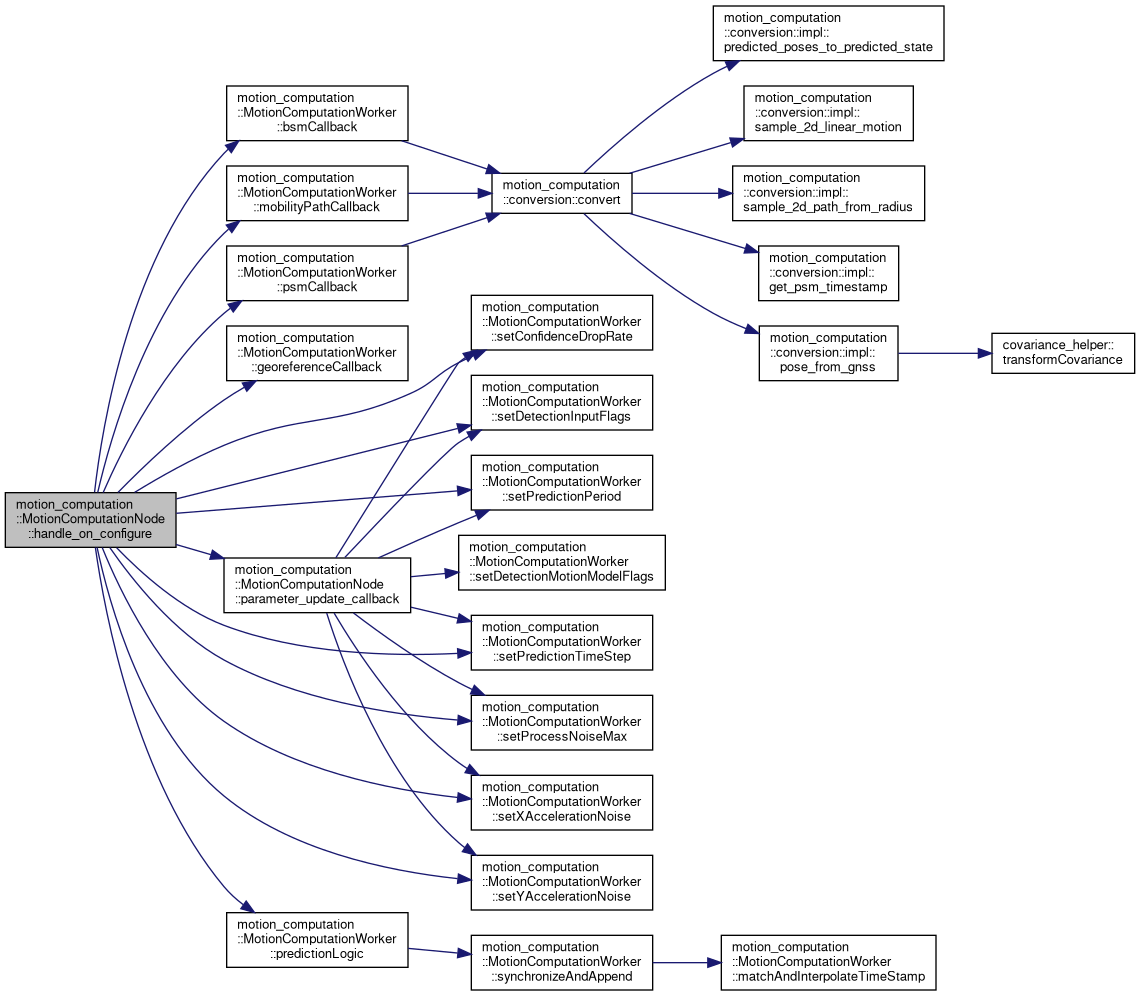
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn motion_computation::MotionComputationNode::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 111 of file motion_computation_node.cpp.
References bsm_sub_, motion_computation::MotionComputationWorker::bsmCallback(), carma_obj_pub_, config_, motion_computation::Config::cv_x_accel_noise, motion_computation::Config::cv_y_accel_noise, motion_computation::Config::enable_bsm_processing, motion_computation::Config::enable_ctrv_for_large_vehicle_obj, motion_computation::Config::enable_ctrv_for_motorcycle_obj, motion_computation::Config::enable_ctrv_for_pedestrian_obj, motion_computation::Config::enable_ctrv_for_small_vehicle_obj, motion_computation::Config::enable_ctrv_for_unknown_obj, motion_computation::Config::enable_mobility_path_processing, motion_computation::Config::enable_psm_processing, motion_computation::Config::enable_sensor_processing, georeference_sub_, motion_computation::MotionComputationWorker::georeferenceCallback(), mobility_path_sub_, motion_computation::MotionComputationWorker::mobilityPathCallback(), motion_comp_sub_, motion_worker_, parameter_update_callback(), motion_computation::Config::prediction_confidence_drop_rate, motion_computation::Config::prediction_period, motion_computation::Config::prediction_process_noise_max, motion_computation::Config::prediction_time_step, motion_computation::MotionComputationWorker::predictionLogic(), psm_sub_, motion_computation::MotionComputationWorker::psmCallback(), motion_computation::MotionComputationWorker::setConfidenceDropRate(), motion_computation::MotionComputationWorker::setDetectionInputFlags(), motion_computation::MotionComputationWorker::setPredictionPeriod(), motion_computation::MotionComputationWorker::setPredictionTimeStep(), motion_computation::MotionComputationWorker::setProcessNoiseMax(), motion_computation::MotionComputationWorker::setXAccelerationNoise(), and motion_computation::MotionComputationWorker::setYAccelerationNoise().
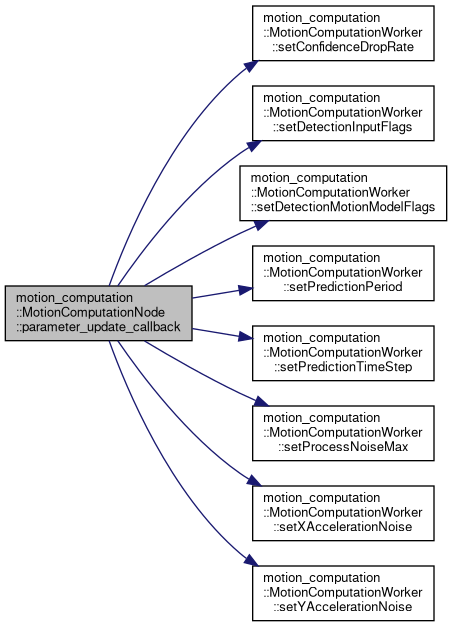
◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult motion_computation::MotionComputationNode::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
Function callback for dynamic parameter updates.
Definition at line 63 of file motion_computation_node.cpp.
References config_, motion_computation::Config::cv_x_accel_noise, motion_computation::Config::cv_y_accel_noise, motion_computation::Config::enable_bsm_processing, motion_computation::Config::enable_ctrv_for_large_vehicle_obj, motion_computation::Config::enable_ctrv_for_motorcycle_obj, motion_computation::Config::enable_ctrv_for_pedestrian_obj, motion_computation::Config::enable_ctrv_for_small_vehicle_obj, motion_computation::Config::enable_ctrv_for_unknown_obj, motion_computation::Config::enable_mobility_path_processing, motion_computation::Config::enable_psm_processing, motion_computation::Config::enable_sensor_processing, motion_worker_, motion_computation::Config::prediction_confidence_drop_rate, motion_computation::Config::prediction_period, motion_computation::Config::prediction_process_noise_max, motion_computation::Config::prediction_time_step, motion_computation::MotionComputationWorker::setConfidenceDropRate(), motion_computation::MotionComputationWorker::setDetectionInputFlags(), motion_computation::MotionComputationWorker::setDetectionMotionModelFlags(), motion_computation::MotionComputationWorker::setPredictionPeriod(), motion_computation::MotionComputationWorker::setPredictionTimeStep(), motion_computation::MotionComputationWorker::setProcessNoiseMax(), motion_computation::MotionComputationWorker::setXAccelerationNoise(), and motion_computation::MotionComputationWorker::setYAccelerationNoise().
Referenced by handle_on_configure().

◆ publishObject()
| void motion_computation::MotionComputationNode::publishObject | ( | const carma_perception_msgs::msg::ExternalObjectList & | obj_pred_msg | ) | const |
Function to publish ExternalObjectList.
- Parameters
-
obj_pred_msg ExternalObjectList message to be published
Definition at line 184 of file motion_computation_node.cpp.
References carma_obj_pub_.
Member Data Documentation
◆ bsm_sub_
|
private |
Definition at line 45 of file motion_computation_node.hpp.
Referenced by handle_on_configure().
◆ carma_obj_pub_
|
private |
Definition at line 50 of file motion_computation_node.hpp.
Referenced by handle_on_configure(), and publishObject().
◆ config_
|
private |
Definition at line 56 of file motion_computation_node.hpp.
Referenced by MotionComputationNode(), handle_on_configure(), and parameter_update_callback().
◆ georeference_sub_
|
private |
Definition at line 47 of file motion_computation_node.hpp.
Referenced by handle_on_configure().
◆ mobility_path_sub_
|
private |
Definition at line 44 of file motion_computation_node.hpp.
Referenced by handle_on_configure().
◆ motion_comp_sub_
|
private |
Definition at line 43 of file motion_computation_node.hpp.
Referenced by handle_on_configure().
◆ motion_worker_
|
private |
Definition at line 53 of file motion_computation_node.hpp.
Referenced by handle_on_configure(), and parameter_update_callback().
◆ psm_sub_
|
private |
Definition at line 46 of file motion_computation_node.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- motion_computation/include/motion_computation/motion_computation_node.hpp
- motion_computation/src/motion_computation_node.cpp