#include <port_drayage_worker.hpp>
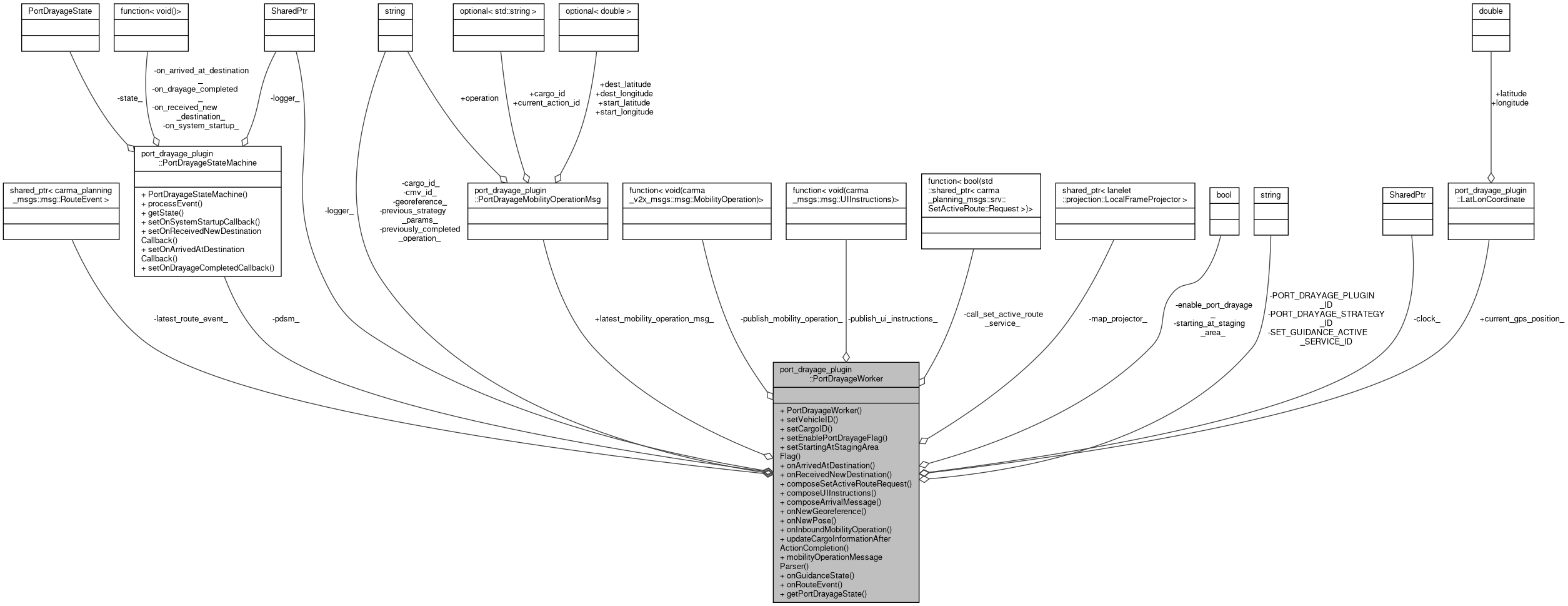
Public Member Functions | |
| PortDrayageWorker (rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr logger, rclcpp::Clock::SharedPtr clock, std::function< void(carma_v2x_msgs::msg::MobilityOperation)> mobility_operations_publisher, std::function< void(carma_msgs::msg::UIInstructions)> ui_instructions_publisher, std::function< bool(std::shared_ptr< carma_planning_msgs::srv::SetActiveRoute::Request >)> call_set_active_route) | |
| Standard constructor for the PortDrayageWorker. More... | |
| void | setVehicleID (const std::string &cmv_id) |
| Setter function to set this object's cmv_id_ string. More... | |
| void | setCargoID (const std::string &cargo_id) |
| Setter function to set this object's cargo_id_ string. More... | |
| void | setEnablePortDrayageFlag (bool enable_port_drayage) |
| Setter function to set this object's enable_port_drayage flag. More... | |
| void | setStartingAtStagingAreaFlag (bool starting_at_staging_area) |
| Setter function to set this object's starting_at_staging_area flag. More... | |
| void | onArrivedAtDestination () |
| Callback for usage by the PortDrayageStateMachine when the vehicle has arrived at a destination. More... | |
| void | onReceivedNewDestination () |
| Callback for usage by the PortDrayageStateMachine when the vehicle has received a new destination. More... | |
| std::shared_ptr< carma_planning_msgs::srv::SetActiveRoute::Request > | composeSetActiveRouteRequest (boost::optional< double > dest_latitude, boost::optional< double > dest_longitude) const |
| Create a SetActiveRoute service request to set a new active route for the system based on the destination points contained in the most recently-received Port Drayage MobilityOperation message intended for this vehicle. More... | |
| carma_msgs::msg::UIInstructions | composeUIInstructions (const std::string ¤t_operation, const std::string &previous_operation) |
| Creates a UIInstructions message that can be used to create a pop-up on the Web UI to notify a user that a new route has been received for a specified destination type, and that the system can be engaged on that route. More... | |
| carma_v2x_msgs::msg::MobilityOperation | composeArrivalMessage () const |
| Assemble the current dataset into a MobilityOperations message with a JSON formatted body containing CMV ID and cargo ID. More... | |
| void | onNewGeoreference (std_msgs::msg::String::UniquePtr msg) |
| Callback for map projection string to define lat/lon <--> map conversion. More... | |
| void | onNewPose (geometry_msgs::msg::PoseStamped::UniquePtr msg) |
| Callback for the pose subscriber. The pose will be converted into lat/lon and stored locally. More... | |
| void | onInboundMobilityOperation (carma_v2x_msgs::msg::MobilityOperation::UniquePtr msg) |
| Callback to process a received MobilityOperation message. More... | |
| void | updateCargoInformationAfterActionCompletion (const PortDrayageMobilityOperationMsg &previous_port_drayage_msg) |
| Method to update worker's cargo-related data members depending on whether the previously completed action was for a pickup or dropoff. More... | |
| void | mobilityOperationMessageParser (std::string mobility_operation_strategy_params) |
| Function to help parse the text included in an inbound MobilityOperation message's strategy_params field according to the JSON schema intended for MobilityOperation messages with strategy type 'carma/port_drayage'. Stores the parsed information in _latest_mobility_operation_msg. More... | |
| void | onGuidanceState (const carma_planning_msgs::msg::GuidanceState::UniquePtr msg) |
| Callback to process the current status of the guidance state machine. More... | |
| void | onRouteEvent (const carma_planning_msgs::msg::RouteEvent::UniquePtr msg) |
| Callback to process each Route Event. More... | |
| PortDrayageState | getPortDrayageState () |
| Get the current state of the port drayage state machine. More... | |
Public Attributes | |
| PortDrayageMobilityOperationMsg | latest_mobility_operation_msg_ |
| LatLonCoordinate | current_gps_position_ |
Private Attributes | |
| std::shared_ptr< carma_planning_msgs::msg::RouteEvent > | latest_route_event_ = nullptr |
| PortDrayageStateMachine | pdsm_ |
| std::string | previously_completed_operation_ |
| std::string | cmv_id_ |
| std::string | cargo_id_ |
| std::function< void(carma_v2x_msgs::msg::MobilityOperation)> | publish_mobility_operation_ |
| std::function< void(carma_msgs::msg::UIInstructions)> | publish_ui_instructions_ |
| std::function< bool(std::shared_ptr< carma_planning_msgs::srv::SetActiveRoute::Request >)> | call_set_active_route_service_ |
| std::shared_ptr< lanelet::projection::LocalFrameProjector > | map_projector_ = nullptr |
| std::string | georeference_ {""} |
| bool | starting_at_staging_area_ |
| bool | enable_port_drayage_ |
| std::string | previous_strategy_params_ |
| const std::string | PORT_DRAYAGE_PLUGIN_ID = "port_drayage_plugin" |
| const std::string | PORT_DRAYAGE_STRATEGY_ID = "carma/port_drayage" |
| const std::string | SET_GUIDANCE_ACTIVE_SERVICE_ID = "/guidance/set_guidance_active" |
| rclcpp::Clock::SharedPtr | clock_ |
| rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr | logger_ |
Detailed Description
Implementation class for all the business logic of the PortDrayagePlugin
Definition at line 125 of file port_drayage_worker.hpp.
Constructor & Destructor Documentation
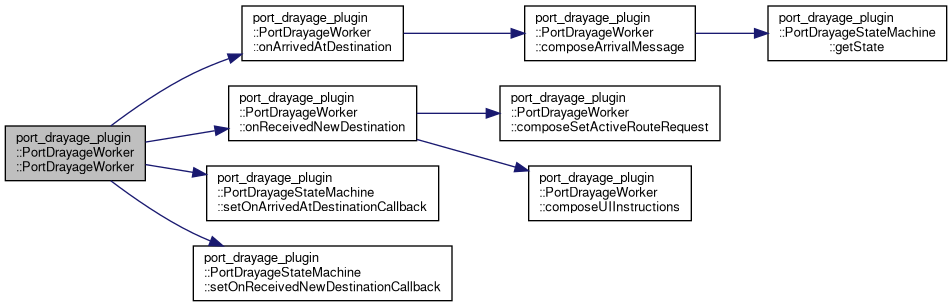
◆ PortDrayageWorker()
| port_drayage_plugin::PortDrayageWorker::PortDrayageWorker | ( | rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr | logger, |
| rclcpp::Clock::SharedPtr | clock, | ||
| std::function< void(carma_v2x_msgs::msg::MobilityOperation)> | mobility_operations_publisher, | ||
| std::function< void(carma_msgs::msg::UIInstructions)> | ui_instructions_publisher, | ||
| std::function< bool(std::shared_ptr< carma_planning_msgs::srv::SetActiveRoute::Request >)> | call_set_active_route | ||
| ) |
Standard constructor for the PortDrayageWorker.
- Parameters
-
mobility_operations_publisher A function containing the logic necessary to publish a Mobility Operations message. ui_instructions_publisher A function containing the logic necessary to publish a UI Instructions message. call_set_active_route A function containing the logic necessary to call the SetActiveRoute service client.
Definition at line 43 of file port_drayage_worker.cpp.
References onArrivedAtDestination(), onReceivedNewDestination(), pdsm_, port_drayage_plugin::PortDrayageStateMachine::setOnArrivedAtDestinationCallback(), and port_drayage_plugin::PortDrayageStateMachine::setOnReceivedNewDestinationCallback().
Member Function Documentation
◆ composeArrivalMessage()
| carma_v2x_msgs::msg::MobilityOperation port_drayage_plugin::PortDrayageWorker::composeArrivalMessage | ( | ) | const |
Assemble the current dataset into a MobilityOperations message with a JSON formatted body containing CMV ID and cargo ID.
Definition at line 149 of file port_drayage_worker.cpp.
References port_drayage_plugin::PortDrayageMobilityOperationMsg::cargo_id, cargo_id_, clock_, cmv_id_, port_drayage_plugin::PortDrayageMobilityOperationMsg::current_action_id, current_gps_position_, port_drayage_plugin::OperationID::DROPOFF, port_drayage_plugin::EN_ROUTE_TO_INITIAL_DESTINATION, port_drayage_plugin::EN_ROUTE_TO_RECEIVED_DESTINATION, port_drayage_plugin::OperationID::ENTER_PORT, port_drayage_plugin::OperationID::ENTER_STAGING_AREA, port_drayage_plugin::PortDrayageStateMachine::getState(), latest_mobility_operation_msg_, port_drayage_plugin::LatLonCoordinate::latitude, logger_, port_drayage_plugin::LatLonCoordinate::longitude, port_drayage_plugin::PortDrayageMobilityOperationMsg::operation, pdsm_, port_drayage_plugin::OperationID::PICKUP, PORT_DRAYAGE_STRATEGY_ID, and starting_at_staging_area_.
Referenced by onArrivedAtDestination().


◆ composeSetActiveRouteRequest()
| std::shared_ptr< carma_planning_msgs::srv::SetActiveRoute::Request > port_drayage_plugin::PortDrayageWorker::composeSetActiveRouteRequest | ( | boost::optional< double > | dest_latitude, |
| boost::optional< double > | dest_longitude | ||
| ) | const |
Create a SetActiveRoute service request to set a new active route for the system based on the destination points contained in the most recently-received Port Drayage MobilityOperation message intended for this vehicle.
- Parameters
-
dest_latitude The destination point's latitude dest_longitude The destination point's longitude
Definition at line 98 of file port_drayage_worker.cpp.
References port_drayage_plugin::PortDrayageMobilityOperationMsg::dest_latitude, port_drayage_plugin::PortDrayageMobilityOperationMsg::dest_longitude, latest_mobility_operation_msg_, logger_, and port_drayage_plugin::PortDrayageMobilityOperationMsg::operation.
Referenced by onReceivedNewDestination().

◆ composeUIInstructions()
| carma_msgs::msg::UIInstructions port_drayage_plugin::PortDrayageWorker::composeUIInstructions | ( | const std::string & | current_operation, |
| const std::string & | previous_operation | ||
| ) |
Creates a UIInstructions message that can be used to create a pop-up on the Web UI to notify a user that a new route has been received for a specified destination type, and that the system can be engaged on that route.
- Parameters
-
current_operation The 'operation' identifier associated with the latest received and processed Port Drayage MobilityOperation message. previous_operation The previously completed 'operation' identifier. This is an empty string if no 'operation' was previously completed.
Definition at line 119 of file port_drayage_worker.cpp.
References clock_, port_drayage_plugin::OperationID::DROPOFF, port_drayage_plugin::OperationID::HOLDING_AREA, port_drayage_plugin::OperationID::PICKUP, and SET_GUIDANCE_ACTIVE_SERVICE_ID.
Referenced by onReceivedNewDestination().

◆ getPortDrayageState()
| PortDrayageState port_drayage_plugin::PortDrayageWorker::getPortDrayageState | ( | ) |
Get the current state of the port drayage state machine.
- Returns
- The current state value of the port drayage state machine
Definition at line 393 of file port_drayage_worker.cpp.
References port_drayage_plugin::PortDrayageStateMachine::getState(), and pdsm_.

◆ mobilityOperationMessageParser()
| void port_drayage_plugin::PortDrayageWorker::mobilityOperationMessageParser | ( | std::string | mobility_operation_strategy_params | ) |
Function to help parse the text included in an inbound MobilityOperation message's strategy_params field according to the JSON schema intended for MobilityOperation messages with strategy type 'carma/port_drayage'. Stores the parsed information in _latest_mobility_operation_msg.
- Parameters
-
mobility_operation_strategy_params the strategy_params field of a MobilityOperation message
Definition at line 292 of file port_drayage_worker.cpp.
References port_drayage_plugin::PortDrayageMobilityOperationMsg::cargo_id, cargo_id_, port_drayage_plugin::PortDrayageMobilityOperationMsg::current_action_id, port_drayage_plugin::PortDrayageMobilityOperationMsg::dest_latitude, port_drayage_plugin::PortDrayageMobilityOperationMsg::dest_longitude, port_drayage_plugin::OperationID::DROPOFF, latest_mobility_operation_msg_, logger_, port_drayage_plugin::PortDrayageMobilityOperationMsg::operation, port_drayage_plugin::OperationID::PICKUP, port_drayage_plugin::PortDrayageMobilityOperationMsg::start_latitude, and port_drayage_plugin::PortDrayageMobilityOperationMsg::start_longitude.
Referenced by onInboundMobilityOperation().

◆ onArrivedAtDestination()
| void port_drayage_plugin::PortDrayageWorker::onArrivedAtDestination | ( | ) |
Callback for usage by the PortDrayageStateMachine when the vehicle has arrived at a destination.
Definition at line 74 of file port_drayage_worker.cpp.
References composeArrivalMessage(), and publish_mobility_operation_.
Referenced by PortDrayageWorker().


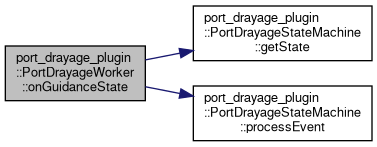
◆ onGuidanceState()
| void port_drayage_plugin::PortDrayageWorker::onGuidanceState | ( | const carma_planning_msgs::msg::GuidanceState::UniquePtr | msg | ) |
Callback to process the current status of the guidance state machine.
- Parameters
-
msg a received GuidanceState message
Definition at line 369 of file port_drayage_worker.cpp.
References port_drayage_plugin::DRAYAGE_START, enable_port_drayage_, lightbar_manager::ENGAGED, port_drayage_plugin::PortDrayageStateMachine::getState(), port_drayage_plugin::INACTIVE, logger_, pdsm_, and port_drayage_plugin::PortDrayageStateMachine::processEvent().
Referenced by port_drayage_plugin::PortDrayagePlugin::handle_on_configure().

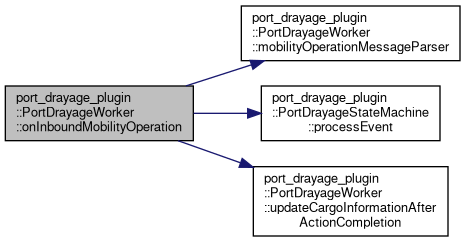
◆ onInboundMobilityOperation()
| void port_drayage_plugin::PortDrayageWorker::onInboundMobilityOperation | ( | carma_v2x_msgs::msg::MobilityOperation::UniquePtr | msg | ) |
Callback to process a received MobilityOperation message.
- Parameters
-
msg a received MobilityOperation message
Definition at line 242 of file port_drayage_worker.cpp.
References cmv_id_, latest_mobility_operation_msg_, logger_, mobilityOperationMessageParser(), port_drayage_plugin::PortDrayageMobilityOperationMsg::operation, pdsm_, PORT_DRAYAGE_STRATEGY_ID, previous_strategy_params_, previously_completed_operation_, port_drayage_plugin::PortDrayageStateMachine::processEvent(), port_drayage_plugin::RECEIVED_NEW_DESTINATION, and updateCargoInformationAfterActionCompletion().
Referenced by port_drayage_plugin::PortDrayagePlugin::handle_on_configure().

◆ onNewGeoreference()
| void port_drayage_plugin::PortDrayageWorker::onNewGeoreference | ( | std_msgs::msg::String::UniquePtr | msg | ) |
Callback for map projection string to define lat/lon <--> map conversion.
- Parameters
-
msg The proj string defining the projection.
Definition at line 411 of file port_drayage_worker.cpp.
References georeference_, and map_projector_.
Referenced by port_drayage_plugin::PortDrayagePlugin::handle_on_configure().

◆ onNewPose()
| void port_drayage_plugin::PortDrayageWorker::onNewPose | ( | geometry_msgs::msg::PoseStamped::UniquePtr | msg | ) |
Callback for the pose subscriber. The pose will be converted into lat/lon and stored locally.
- Parameters
-
msg Latest pose message
Definition at line 397 of file port_drayage_worker.cpp.
References current_gps_position_, port_drayage_plugin::LatLonCoordinate::latitude, logger_, port_drayage_plugin::LatLonCoordinate::longitude, and map_projector_.
Referenced by port_drayage_plugin::PortDrayagePlugin::handle_on_configure().

◆ onReceivedNewDestination()
| void port_drayage_plugin::PortDrayageWorker::onReceivedNewDestination | ( | ) |
Callback for usage by the PortDrayageStateMachine when the vehicle has received a new destination.
Definition at line 79 of file port_drayage_worker.cpp.
References call_set_active_route_service_, composeSetActiveRouteRequest(), composeUIInstructions(), port_drayage_plugin::PortDrayageMobilityOperationMsg::dest_latitude, port_drayage_plugin::PortDrayageMobilityOperationMsg::dest_longitude, latest_mobility_operation_msg_, logger_, port_drayage_plugin::PortDrayageMobilityOperationMsg::operation, previously_completed_operation_, and publish_ui_instructions_.
Referenced by PortDrayageWorker().

◆ onRouteEvent()
| void port_drayage_plugin::PortDrayageWorker::onRouteEvent | ( | const carma_planning_msgs::msg::RouteEvent::UniquePtr | msg | ) |
Callback to process each Route Event.
- Parameters
-
msg a received RouteEvent message
Definition at line 377 of file port_drayage_worker.cpp.
References port_drayage_plugin::ARRIVED_AT_DESTINATION, port_drayage_plugin::EN_ROUTE_TO_INITIAL_DESTINATION, port_drayage_plugin::EN_ROUTE_TO_RECEIVED_DESTINATION, port_drayage_plugin::PortDrayageStateMachine::getState(), latest_route_event_, logger_, pdsm_, port_drayage_plugin::PortDrayageStateMachine::processEvent(), route::ROUTE_COMPLETED, and route::ROUTE_LOADED.
Referenced by port_drayage_plugin::PortDrayagePlugin::handle_on_configure().

◆ setCargoID()
| void port_drayage_plugin::PortDrayageWorker::setCargoID | ( | const std::string & | cargo_id | ) |
Setter function to set this object's cargo_id_ string.
- Parameters
-
cargo_id The provided Cargo ID for this object
Definition at line 62 of file port_drayage_worker.cpp.
References cargo_id_.
Referenced by port_drayage_plugin::PortDrayagePlugin::handle_on_configure(), and port_drayage_plugin::PortDrayagePlugin::parameter_update_callback().

◆ setEnablePortDrayageFlag()
| void port_drayage_plugin::PortDrayageWorker::setEnablePortDrayageFlag | ( | bool | enable_port_drayage | ) |
Setter function to set this object's enable_port_drayage flag.
- Parameters
-
enable_port_drayage The provided boolean flag
Definition at line 66 of file port_drayage_worker.cpp.
References enable_port_drayage_.
Referenced by port_drayage_plugin::PortDrayagePlugin::handle_on_configure(), and port_drayage_plugin::PortDrayagePlugin::parameter_update_callback().

◆ setStartingAtStagingAreaFlag()
| void port_drayage_plugin::PortDrayageWorker::setStartingAtStagingAreaFlag | ( | bool | starting_at_staging_area | ) |
Setter function to set this object's starting_at_staging_area flag.
- Parameters
-
starting_at_staging_area The provided boolean flag
Definition at line 70 of file port_drayage_worker.cpp.
References starting_at_staging_area_.
Referenced by port_drayage_plugin::PortDrayagePlugin::handle_on_configure(), and port_drayage_plugin::PortDrayagePlugin::parameter_update_callback().

◆ setVehicleID()
| void port_drayage_plugin::PortDrayageWorker::setVehicleID | ( | const std::string & | cmv_id | ) |
Setter function to set this object's cmv_id_ string.
- Parameters
-
cmv_id The provided CMV ID for this object
Definition at line 58 of file port_drayage_worker.cpp.
References cmv_id_.
Referenced by port_drayage_plugin::PortDrayagePlugin::handle_on_configure(), and port_drayage_plugin::PortDrayagePlugin::parameter_update_callback().

◆ updateCargoInformationAfterActionCompletion()
| void port_drayage_plugin::PortDrayageWorker::updateCargoInformationAfterActionCompletion | ( | const PortDrayageMobilityOperationMsg & | previous_port_drayage_msg | ) |
Method to update worker's cargo-related data members depending on whether the previously completed action was for a pickup or dropoff.
- Parameters
-
previous_port_drayage_msg The contents of the previously received MobilityOperation port drayage message for this CMV stored in a PortDrayageMobilityOperationMsg object.
Definition at line 273 of file port_drayage_worker.cpp.
References port_drayage_plugin::PortDrayageMobilityOperationMsg::cargo_id, cargo_id_, port_drayage_plugin::OperationID::DROPOFF, logger_, port_drayage_plugin::PortDrayageMobilityOperationMsg::operation, and port_drayage_plugin::OperationID::PICKUP.
Referenced by onInboundMobilityOperation().

Member Data Documentation
◆ call_set_active_route_service_
|
private |
Definition at line 135 of file port_drayage_worker.hpp.
Referenced by onReceivedNewDestination().
◆ cargo_id_
|
private |
Definition at line 132 of file port_drayage_worker.hpp.
Referenced by composeArrivalMessage(), mobilityOperationMessageParser(), setCargoID(), and updateCargoInformationAfterActionCompletion().
◆ clock_
|
private |
Definition at line 150 of file port_drayage_worker.hpp.
Referenced by composeArrivalMessage(), and composeUIInstructions().
◆ cmv_id_
|
private |
Definition at line 131 of file port_drayage_worker.hpp.
Referenced by composeArrivalMessage(), onInboundMobilityOperation(), and setVehicleID().
◆ current_gps_position_
| LatLonCoordinate port_drayage_plugin::PortDrayageWorker::current_gps_position_ |
Definition at line 288 of file port_drayage_worker.hpp.
Referenced by composeArrivalMessage(), and onNewPose().
◆ enable_port_drayage_
|
private |
Definition at line 139 of file port_drayage_worker.hpp.
Referenced by onGuidanceState(), and setEnablePortDrayageFlag().
◆ georeference_
|
private |
Definition at line 137 of file port_drayage_worker.hpp.
Referenced by onNewGeoreference().
◆ latest_mobility_operation_msg_
| PortDrayageMobilityOperationMsg port_drayage_plugin::PortDrayageWorker::latest_mobility_operation_msg_ |
Definition at line 285 of file port_drayage_worker.hpp.
Referenced by composeArrivalMessage(), composeSetActiveRouteRequest(), mobilityOperationMessageParser(), onInboundMobilityOperation(), and onReceivedNewDestination().
◆ latest_route_event_
|
private |
Definition at line 128 of file port_drayage_worker.hpp.
Referenced by onRouteEvent().
◆ logger_
|
private |
Definition at line 153 of file port_drayage_worker.hpp.
Referenced by composeArrivalMessage(), composeSetActiveRouteRequest(), mobilityOperationMessageParser(), onGuidanceState(), onInboundMobilityOperation(), onNewPose(), onReceivedNewDestination(), onRouteEvent(), and updateCargoInformationAfterActionCompletion().
◆ map_projector_
|
private |
Definition at line 136 of file port_drayage_worker.hpp.
Referenced by onNewGeoreference(), and onNewPose().
◆ pdsm_
|
private |
Definition at line 129 of file port_drayage_worker.hpp.
Referenced by PortDrayageWorker(), composeArrivalMessage(), getPortDrayageState(), onGuidanceState(), onInboundMobilityOperation(), and onRouteEvent().
◆ PORT_DRAYAGE_PLUGIN_ID
|
private |
Definition at line 145 of file port_drayage_worker.hpp.
◆ PORT_DRAYAGE_STRATEGY_ID
|
private |
Definition at line 146 of file port_drayage_worker.hpp.
Referenced by composeArrivalMessage(), and onInboundMobilityOperation().
◆ previous_strategy_params_
|
private |
Definition at line 142 of file port_drayage_worker.hpp.
Referenced by onInboundMobilityOperation().
◆ previously_completed_operation_
|
private |
Definition at line 130 of file port_drayage_worker.hpp.
Referenced by onInboundMobilityOperation(), and onReceivedNewDestination().
◆ publish_mobility_operation_
|
private |
Definition at line 133 of file port_drayage_worker.hpp.
Referenced by onArrivedAtDestination().
◆ publish_ui_instructions_
|
private |
Definition at line 134 of file port_drayage_worker.hpp.
Referenced by onReceivedNewDestination().
◆ SET_GUIDANCE_ACTIVE_SERVICE_ID
|
private |
Definition at line 147 of file port_drayage_worker.hpp.
Referenced by composeUIInstructions().
◆ starting_at_staging_area_
|
private |
Definition at line 138 of file port_drayage_worker.hpp.
Referenced by composeArrivalMessage(), and setStartingAtStagingAreaFlag().
The documentation for this class was generated from the following files:
- port_drayage_plugin/include/port_drayage_plugin/port_drayage_worker.hpp
- port_drayage_plugin/src/port_drayage_worker.cpp