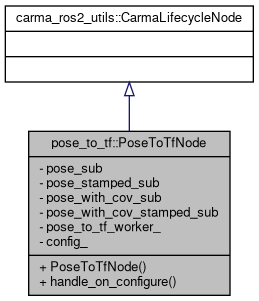
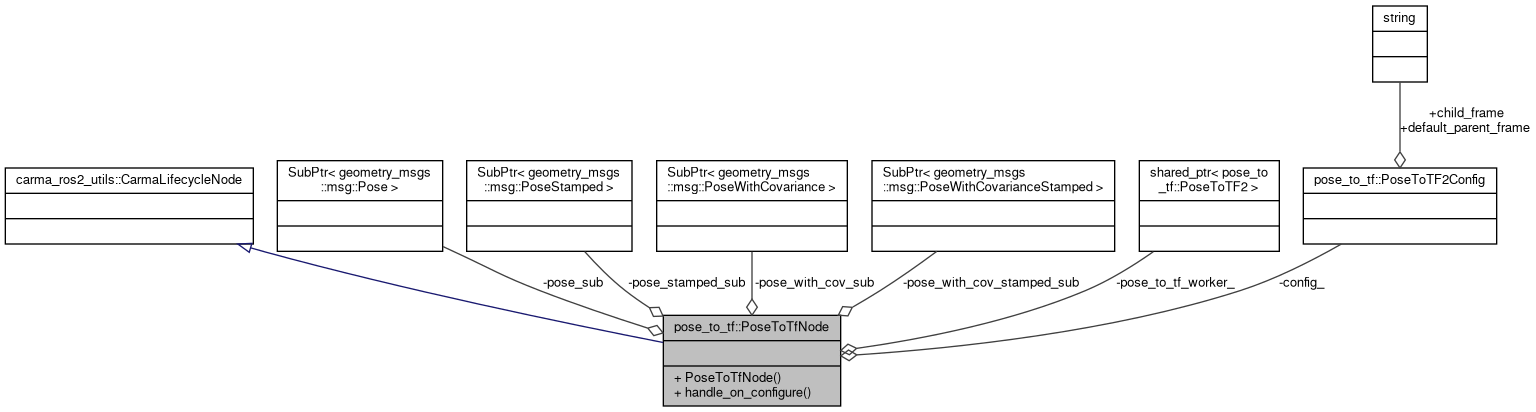
The class is responsible for processing pose to tf conversion.
More...
#include <PoseToTF2Node.hpp>
Public Member Functions | |
| PoseToTfNode (const rclcpp::NodeOptions &) | |
| PoseToTfNode constructor. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
Private Attributes | |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::Pose > | pose_sub |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::PoseStamped > | pose_stamped_sub |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::PoseWithCovariance > | pose_with_cov_sub |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::PoseWithCovarianceStamped > | pose_with_cov_stamped_sub |
| std::shared_ptr< PoseToTF2 > | pose_to_tf_worker_ |
| PoseToTF2Config | config_ |
Detailed Description
The class is responsible for processing pose to tf conversion.
Definition at line 32 of file PoseToTF2Node.hpp.
Constructor & Destructor Documentation
◆ PoseToTfNode()
|
explicit |
PoseToTfNode constructor.
Definition at line 24 of file PoseToTF2Node.cpp.
References pose_to_tf::PoseToTF2Config::child_frame, config_, and pose_to_tf::PoseToTF2Config::default_parent_frame.
Member Function Documentation
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn pose_to_tf::PoseToTfNode::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 35 of file PoseToTF2Node.cpp.
References config_, pose_stamped_sub, pose_sub, pose_to_tf_worker_, pose_with_cov_stamped_sub, pose_with_cov_sub, pose_to_tf::PoseToTF2::poseCallback(), pose_to_tf::PoseToTF2::poseStampedCallback(), pose_to_tf::PoseToTF2::poseWithCovarianceCallback(), and pose_to_tf::PoseToTF2::poseWithCovarianceStampedCallback().

Member Data Documentation
◆ config_
|
private |
Definition at line 46 of file PoseToTF2Node.hpp.
Referenced by PoseToTfNode(), and handle_on_configure().
◆ pose_stamped_sub
|
private |
Definition at line 38 of file PoseToTF2Node.hpp.
Referenced by handle_on_configure().
◆ pose_sub
|
private |
Definition at line 37 of file PoseToTF2Node.hpp.
Referenced by handle_on_configure().
◆ pose_to_tf_worker_
|
private |
Definition at line 43 of file PoseToTF2Node.hpp.
Referenced by handle_on_configure().
◆ pose_with_cov_stamped_sub
|
private |
Definition at line 40 of file PoseToTF2Node.hpp.
Referenced by handle_on_configure().
◆ pose_with_cov_sub
|
private |
Definition at line 39 of file PoseToTF2Node.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- pose_to_tf/include/pose_to_tf/PoseToTF2Node.hpp
- pose_to_tf/src/PoseToTF2Node.cpp