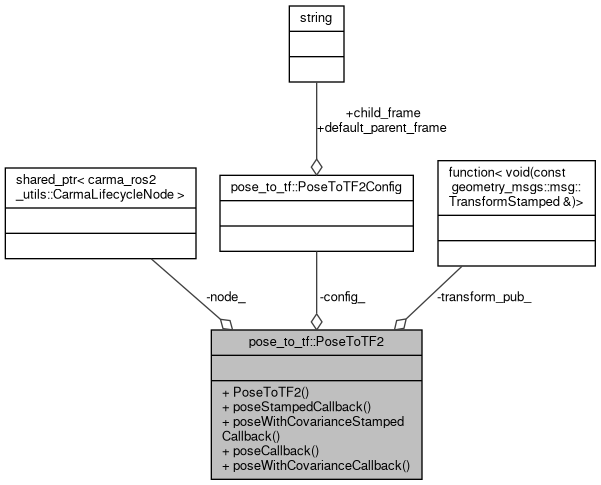
Primary logic class for the PoseToTF2 node. More...
#include <PoseToTF2.hpp>
Public Types | |
| using | TransformPublisher = std::function< void(const geometry_msgs::msg::TransformStamped &)> |
Public Member Functions | |
| PoseToTF2 (PoseToTF2Config config, TransformPublisher transform_pub, std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > node) | |
| Constructor. More... | |
| void | poseStampedCallback (geometry_msgs::msg::PoseStamped::UniquePtr msg) |
| Callback for new pose stamped messages. More... | |
| void | poseWithCovarianceStampedCallback (geometry_msgs::msg::PoseWithCovarianceStamped::UniquePtr msg) |
| Callback for new pose stamped messages. More... | |
| void | poseCallback (geometry_msgs::msg::Pose::UniquePtr msg) |
| Callback for new pose stamped messages. More... | |
| void | poseWithCovarianceCallback (geometry_msgs::msg::PoseWithCovariance::UniquePtr msg) |
| Callback for new pose with covariance messages. More... | |
Private Attributes | |
| std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | node_ |
| PoseToTF2Config | config_ |
| TransformPublisher | transform_pub_ |
Detailed Description
Primary logic class for the PoseToTF2 node.
Definition at line 33 of file PoseToTF2.hpp.
Member Typedef Documentation
◆ TransformPublisher
| using pose_to_tf::PoseToTF2::TransformPublisher = std::function<void(const geometry_msgs::msg::TransformStamped&)> |
Definition at line 36 of file PoseToTF2.hpp.
Constructor & Destructor Documentation
◆ PoseToTF2()
| pose_to_tf::PoseToTF2::PoseToTF2 | ( | PoseToTF2Config | config, |
| TransformPublisher | transform_pub, | ||
| std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | node | ||
| ) |
Constructor.
- Parameters
-
transform_pub A callback to trigger transform broadcast
Definition at line 60 of file PoseToTF2.cpp.
Member Function Documentation
◆ poseCallback()
| void pose_to_tf::PoseToTF2::poseCallback | ( | geometry_msgs::msg::Pose::UniquePtr | msg | ) |
Callback for new pose stamped messages.
- Parameters
-
msg The pose message to forward
Definition at line 81 of file PoseToTF2.cpp.
References pose_to_tf::PoseToTF2Config::child_frame, config_, tf2::anonymous_namespace{PoseToTF2.cpp}::convert(), pose_to_tf::PoseToTF2Config::default_parent_frame, node_, and transform_pub_.
Referenced by pose_to_tf::PoseToTfNode::handle_on_configure().


◆ poseStampedCallback()
| void pose_to_tf::PoseToTF2::poseStampedCallback | ( | geometry_msgs::msg::PoseStamped::UniquePtr | msg | ) |
Callback for new pose stamped messages.
- Parameters
-
msg The pose message to forward
Definition at line 65 of file PoseToTF2.cpp.
References pose_to_tf::PoseToTF2Config::child_frame, config_, tf2::anonymous_namespace{PoseToTF2.cpp}::convert(), and transform_pub_.
Referenced by pose_to_tf::PoseToTfNode::handle_on_configure().


◆ poseWithCovarianceCallback()
| void pose_to_tf::PoseToTF2::poseWithCovarianceCallback | ( | geometry_msgs::msg::PoseWithCovariance::UniquePtr | msg | ) |
Callback for new pose with covariance messages.
- Parameters
-
msg The pose message to forward
Definition at line 91 of file PoseToTF2.cpp.
References pose_to_tf::PoseToTF2Config::child_frame, config_, tf2::anonymous_namespace{PoseToTF2.cpp}::convert(), pose_to_tf::PoseToTF2Config::default_parent_frame, node_, and transform_pub_.
Referenced by pose_to_tf::PoseToTfNode::handle_on_configure().


◆ poseWithCovarianceStampedCallback()
| void pose_to_tf::PoseToTF2::poseWithCovarianceStampedCallback | ( | geometry_msgs::msg::PoseWithCovarianceStamped::UniquePtr | msg | ) |
Callback for new pose stamped messages.
- Parameters
-
msg The pose message to forward
Definition at line 73 of file PoseToTF2.cpp.
References pose_to_tf::PoseToTF2Config::child_frame, config_, tf2::anonymous_namespace{PoseToTF2.cpp}::convert(), and transform_pub_.
Referenced by pose_to_tf::PoseToTfNode::handle_on_configure().


Member Data Documentation
◆ config_
|
private |
Definition at line 77 of file PoseToTF2.hpp.
Referenced by poseCallback(), poseStampedCallback(), poseWithCovarianceCallback(), and poseWithCovarianceStampedCallback().
◆ node_
|
private |
Definition at line 75 of file PoseToTF2.hpp.
Referenced by poseCallback(), and poseWithCovarianceCallback().
◆ transform_pub_
|
private |
Definition at line 78 of file PoseToTF2.hpp.
Referenced by poseCallback(), poseStampedCallback(), poseWithCovarianceCallback(), and poseWithCovarianceStampedCallback().
The documentation for this class was generated from the following files:
- pose_to_tf/include/pose_to_tf/PoseToTF2.hpp
- pose_to_tf/src/PoseToTF2.cpp