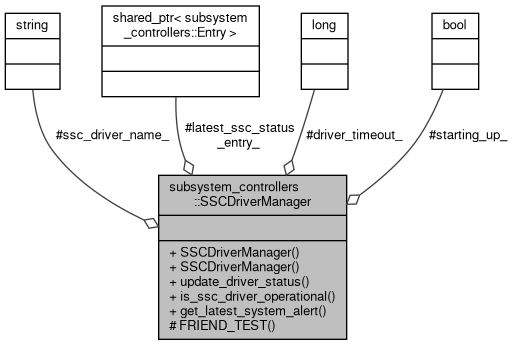
The SSCDriverManager serves as a component to manage ROS1 SSC Driver in CARMA which is primarily in ROS2. More...
#include <ssc_driver_manager.hpp>
Public Member Functions | |
| SSCDriverManager () | |
| Default constructor for SSCDriverManager with driver_timeout_ = 1000ms. More... | |
| SSCDriverManager (const std::string &ssc_driver_name, const long driver_timeout) | |
| Constructor for SSCDriverManager. More... | |
| void | update_driver_status (const carma_driver_msgs::msg::DriverStatus::SharedPtr msg, long current_time) |
| Update driver status. More... | |
| bool | is_ssc_driver_operational (long current_time) |
| Check if all critical drivers are operational. More... | |
| carma_msgs::msg::SystemAlert | get_latest_system_alert (long time_now, long start_up_timestamp, long startup_duration) |
| Handle the spin and publisher. More... | |
Protected Member Functions | |
| FRIEND_TEST (DriverManagerTest, testCarTruckHandleSpinFatalUnknown) | |
Protected Attributes | |
| std::string | ssc_driver_name_ = "" |
| std::shared_ptr< Entry > | latest_ssc_status_entry_ = std::make_shared<Entry>() |
| Latest SSC Status entry to keep track. More... | |
| long | driver_timeout_ = 1000 |
| bool | starting_up_ = true |
Detailed Description
The SSCDriverManager serves as a component to manage ROS1 SSC Driver in CARMA which is primarily in ROS2.
Definition at line 45 of file ssc_driver_manager.hpp.
Constructor & Destructor Documentation
◆ SSCDriverManager() [1/2]
| subsystem_controllers::SSCDriverManager::SSCDriverManager | ( | ) |
Default constructor for SSCDriverManager with driver_timeout_ = 1000ms.
Definition at line 29 of file ssc_driver_manager.cpp.
◆ SSCDriverManager() [2/2]
| subsystem_controllers::SSCDriverManager::SSCDriverManager | ( | const std::string & | ssc_driver_name, |
| const long | driver_timeout | ||
| ) |
Constructor for SSCDriverManager.
- Parameters
-
ssc_driver_name The driver name which will be treated as required. A failure in this plugin will result in an exception driver_timeout The timeout threshold for the driver
Definition at line 31 of file ssc_driver_manager.cpp.
Member Function Documentation
◆ FRIEND_TEST()
|
protected |
◆ get_latest_system_alert()
| carma_msgs::msg::SystemAlert subsystem_controllers::SSCDriverManager::get_latest_system_alert | ( | long | time_now, |
| long | start_up_timestamp, | ||
| long | startup_duration | ||
| ) |
Handle the spin and publisher.
Definition at line 36 of file ssc_driver_manager.cpp.
References is_ssc_driver_operational(), arbitrator::SHUTDOWN, and starting_up_.

◆ is_ssc_driver_operational()
| bool subsystem_controllers::SSCDriverManager::is_ssc_driver_operational | ( | long | current_time | ) |
Check if all critical drivers are operational.
Definition at line 78 of file ssc_driver_manager.cpp.
References driver_timeout_, latest_ssc_status_entry_, and ssc_driver_name_.
Referenced by get_latest_system_alert().

◆ update_driver_status()
| void subsystem_controllers::SSCDriverManager::update_driver_status | ( | const carma_driver_msgs::msg::DriverStatus::SharedPtr | msg, |
| long | current_time | ||
| ) |
Update driver status.
Definition at line 62 of file ssc_driver_manager.cpp.
References latest_ssc_status_entry_, and ssc_driver_name_.
Member Data Documentation
◆ driver_timeout_
|
protected |
Definition at line 87 of file ssc_driver_manager.hpp.
Referenced by is_ssc_driver_operational().
◆ latest_ssc_status_entry_
|
protected |
Latest SSC Status entry to keep track.
Definition at line 84 of file ssc_driver_manager.hpp.
Referenced by is_ssc_driver_operational(), and update_driver_status().
◆ ssc_driver_name_
|
protected |
Definition at line 81 of file ssc_driver_manager.hpp.
Referenced by is_ssc_driver_operational(), and update_driver_status().
◆ starting_up_
|
protected |
Definition at line 89 of file ssc_driver_manager.hpp.
Referenced by get_latest_system_alert().
The documentation for this class was generated from the following files:
- subsystem_controllers/include/subsystem_controllers/drivers_controller/ssc_driver_manager.hpp
- subsystem_controllers/src/drivers_controller/ssc_driver_manager.cpp