An entry represents a driver details for the purposes of tracking. More...
#include <entry.hpp>
Public Member Functions | |
| Entry (bool available, const std::string &name, long timestamp) | |
| All fields constructor. More... | |
| Entry ()=default | |
| Entry (bool available, bool active, const std::string &name, uint8_t type, const std::string &capability, bool user_requested_activation) | |
| All fields constructor. More... | |
| Entry ()=default | |
Public Attributes | |
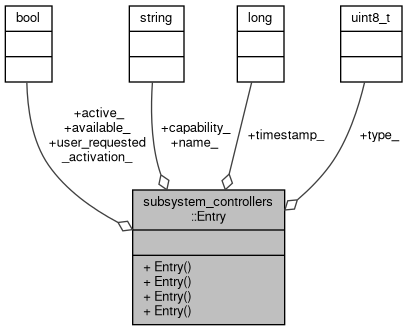
| bool | available_ = false |
| Availability flag of a driver. More... | |
| std::string | name_ |
| Fully specified node name of a driver. More... | |
| long | timestamp_ |
| The timestamp at which the entry was last updated. More... | |
| bool | active_ = false |
| Activation flag of a plugin. More... | |
| uint8_t | type_ = 0 |
| Type of the plugin from the message enum in carma_planning_msgs::Plugin. More... | |
| std::string | capability_ |
| The capability string of the plugin. More... | |
| bool | user_requested_activation_ = false |
| Flag indicating if the user requested this plugin be activated. More... | |
Detailed Description
An entry represents a driver details for the purposes of tracking.
An entry represents a plugins details for the purposes of tracking.
Constructor & Destructor Documentation
◆ Entry() [1/4]
|
inline |
All fields constructor.
Definition at line 38 of file entry.hpp.
◆ Entry() [2/4]
|
default |
◆ Entry() [3/4]
|
inline |
All fields constructor.
Definition at line 44 of file entry.h.
◆ Entry() [4/4]
|
default |
Member Data Documentation
◆ active_
| bool subsystem_controllers::Entry::active_ = false |
Activation flag of a plugin.
Definition at line 31 of file entry.h.
Referenced by subsystem_controllers::PluginManager::activate(), subsystem_controllers::PluginManager::add_plugin(), subsystem_controllers::PluginManager::cleanup(), subsystem_controllers::PluginManager::configure(), and subsystem_controllers::PluginManager::deactivate().
◆ available_
| bool subsystem_controllers::Entry::available_ = false |
Availability flag of a driver.
Availability flag of a plugin.
Definition at line 29 of file entry.hpp.
Referenced by subsystem_controllers::PluginManager::activate(), subsystem_controllers::PluginManager::add_plugin(), subsystem_controllers::PluginManager::cleanup(), subsystem_controllers::PluginManager::configure(), and subsystem_controllers::PluginManager::deactivate().
◆ capability_
| std::string subsystem_controllers::Entry::capability_ |
◆ name_
| std::string subsystem_controllers::Entry::name_ |
Fully specified node name of a driver.
Fully specified node name of a plugin.
Definition at line 31 of file entry.hpp.
Referenced by subsystem_controllers::PluginManager::add_plugin(), and subsystem_controllers::EntryManager::update_entry().
◆ timestamp_
| long subsystem_controllers::Entry::timestamp_ |
◆ type_
| uint8_t subsystem_controllers::Entry::type_ = 0 |
◆ user_requested_activation_
| bool subsystem_controllers::Entry::user_requested_activation_ = false |
Flag indicating if the user requested this plugin be activated.
Definition at line 39 of file entry.h.
Referenced by subsystem_controllers::PluginManager::activate(), subsystem_controllers::PluginManager::cleanup(), subsystem_controllers::PluginManager::configure(), and subsystem_controllers::PluginManager::deactivate().
The documentation for this struct was generated from the following files: