geodetic.cpp File Reference
#include "carma_cooperative_perception/geodetic.hpp"#include <proj.h>#include <gsl/pointers>#include <algorithm>#include <string>#include "carma_cooperative_perception/units_extensions.hpp"
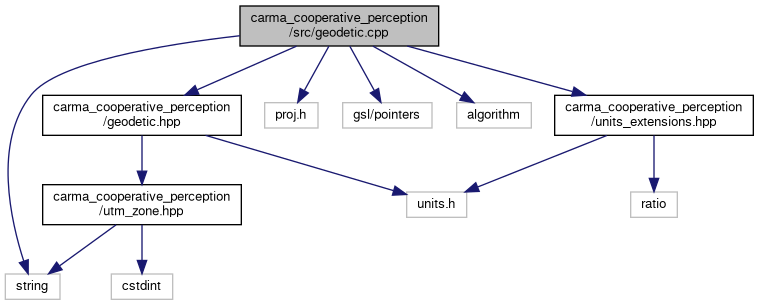
Include dependency graph for geodetic.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | carma_cooperative_perception |
Functions | |
| auto | carma_cooperative_perception::calculate_utm_zone (const Wgs84Coordinate &coordinate) -> UtmZone |
| Get the UTM zone number from a WGS-84 coordinate. More... | |
| auto | carma_cooperative_perception::project_to_carma_map (const Wgs84Coordinate &coordinate, std::string_view proj_string) -> MapCoordinate |
| auto | carma_cooperative_perception::project_to_utm (const Wgs84Coordinate &coordinate) -> UtmCoordinate |
| Projects a Wgs84Coordinate to its corresponding UTM zone. More... | |
| auto | carma_cooperative_perception::calculate_grid_convergence (const Wgs84Coordinate &position, std::string_view georeference) -> units::angle::degree_t |
| auto | carma_cooperative_perception::calculate_grid_convergence (const Wgs84Coordinate &position, const UtmZone &zone) -> units::angle::degree_t |
| Calculate grid convergence at a given position. More... | |