Classes | |
| class | BSpline |
| Realization of SplineI that uses the Eigen::Splines library for interpolation. More... | |
| class | SplineI |
| Interface to a spline interpolator that can be used to smoothly interpolate between points. More... | |
Typedefs | |
| typedef Eigen::Spline< double, 2 > | Spline2d |
Functions | |
| std::vector< double > | moving_average_filter (const std::vector< double > input, int window_size, bool ignore_first_point=true) |
| Extremely simplie moving average filter. More... | |
Typedef Documentation
◆ Spline2d
| typedef Eigen::Spline<double, 2> basic_autonomy::smoothing::Spline2d |
Definition at line 29 of file BSpline.hpp.
Function Documentation
◆ moving_average_filter()
| std::vector< double > basic_autonomy::smoothing::moving_average_filter | ( | const std::vector< double > | input, |
| int | window_size, | ||
| bool | ignore_first_point = true |
||
| ) |
Extremely simplie moving average filter.
- Parameters
-
input The points to be filtered window_size The number of points to use in the moving window for averaging
- Returns
- The filterted points
Definition at line 24 of file filters.cpp.
25{
26 if (window_size % 2 == 0) {
27 throw std::invalid_argument("moving_average_filter window size must be odd");
28 }
29
30 std::vector<double> output;
31 output.reserve(input.size());
32
33 if (input.size() == 0) {
34 return output;
35 }
36
38 if (ignore_first_point) {
39 start_index = 1;
40 output.push_back(input[0]);
41 }
42
44
45
46 double total = 0;
49
50 int count = sample_max - sample_min + 1;
51 std::vector<double> sample;
52 sample.reserve(count);
53 for (int j = sample_min; j <= sample_max; j++) {
54 total += input[j];
55 }
56 output.push_back(total / (double) count);
57
58 }
59
60 return output;
61}
References process_bag::i, and process_traj_logs::start_index.
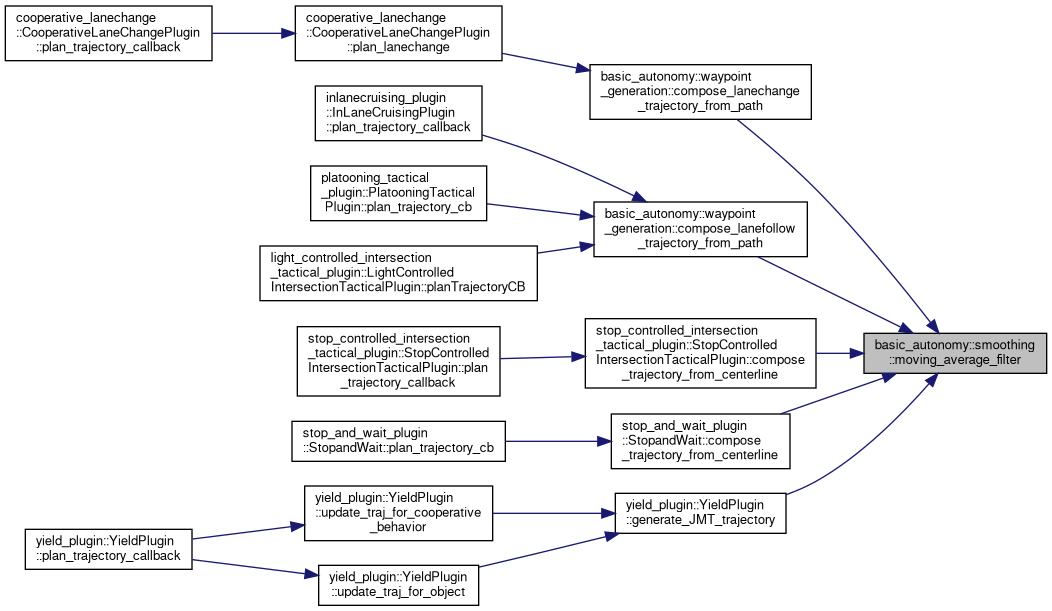
Referenced by basic_autonomy::waypoint_generation::compose_lanechange_trajectory_from_path(), basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path(), stop_controlled_intersection_tactical_plugin::StopControlledIntersectionTacticalPlugin::compose_trajectory_from_centerline(), stop_and_wait_plugin::StopandWait::compose_trajectory_from_centerline(), and yield_plugin::YieldPlugin::generate_JMT_trajectory().
Here is the caller graph for this function: