points_map_filter_node.hpp File Reference
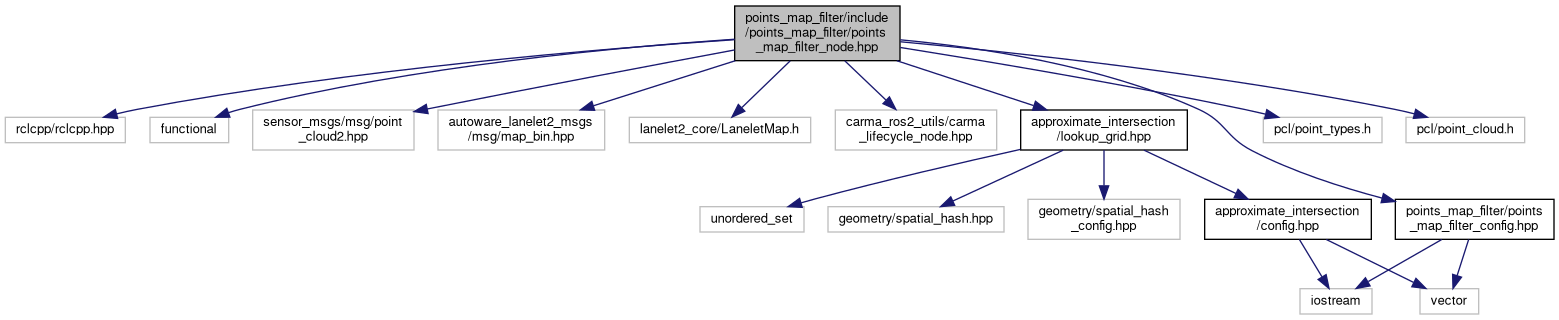
#include <rclcpp/rclcpp.hpp>#include <functional>#include <sensor_msgs/msg/point_cloud2.hpp>#include <autoware_lanelet2_msgs/msg/map_bin.hpp>#include <lanelet2_core/LaneletMap.h>#include <carma_ros2_utils/carma_lifecycle_node.hpp>#include <approximate_intersection/lookup_grid.hpp>#include <pcl/point_types.h>#include <pcl/point_cloud.h>#include "points_map_filter/points_map_filter_config.hpp"
Include dependency graph for points_map_filter_node.hpp:
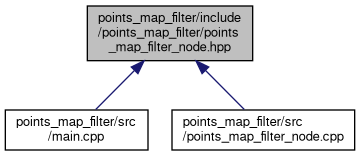
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | points_map_filter::Node |
| TODO for USER: Add class description. More... | |
Namespaces | |
| namespace | points_map_filter |
Typedefs | |
| using | points_map_filter::PointT = pcl::PointXYZI |
| using | points_map_filter::CloudT = pcl::PointCloud< PointT > |