TODO for USER: Add class description. More...
#include <points_map_filter_node.hpp>
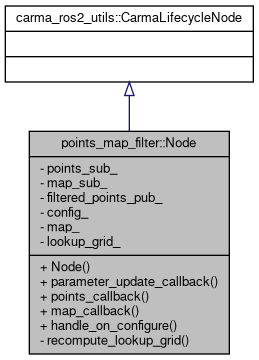
Public Member Functions | |
| Node (const rclcpp::NodeOptions &) | |
| Node constructor. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| Example callback for dynamic parameter updates. More... | |
| void | points_callback (sensor_msgs::msg::PointCloud2::UniquePtr msg) |
| Example subscription callback. More... | |
| void | map_callback (autoware_lanelet2_msgs::msg::MapBin::UniquePtr msg) |
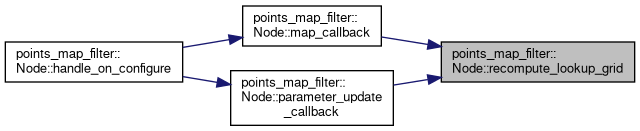
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
Private Member Functions | |
| void | recompute_lookup_grid () |
Private Attributes | |
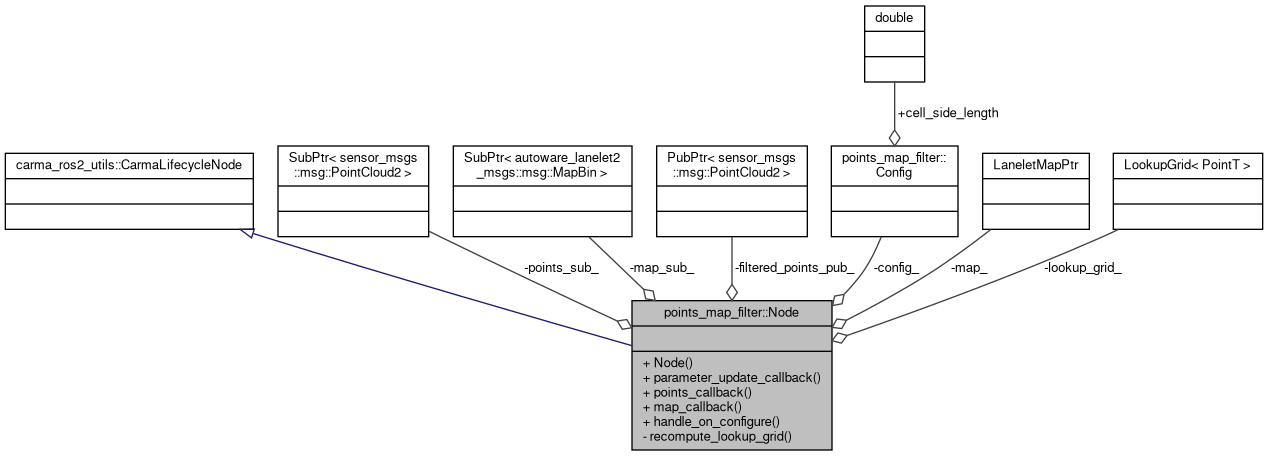
| carma_ros2_utils::SubPtr< sensor_msgs::msg::PointCloud2 > | points_sub_ |
| carma_ros2_utils::SubPtr< autoware_lanelet2_msgs::msg::MapBin > | map_sub_ |
| carma_ros2_utils::PubPtr< sensor_msgs::msg::PointCloud2 > | filtered_points_pub_ |
| Config | config_ |
| lanelet::LaneletMapPtr | map_ |
| approximate_intersection::LookupGrid< PointT > | lookup_grid_ |
Detailed Description
TODO for USER: Add class description.
Definition at line 39 of file points_map_filter_node.hpp.
Constructor & Destructor Documentation
◆ Node()
|
explicit |
Node constructor.
Definition at line 39 of file points_map_filter_node.cpp.
References points_map_filter::Config::cell_side_length, and config_.
Member Function Documentation
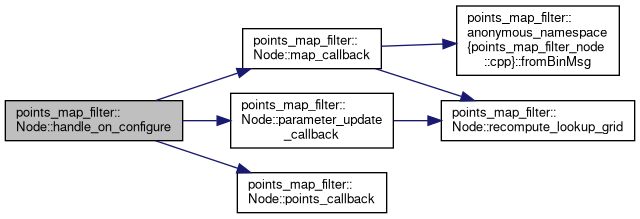
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn points_map_filter::Node::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 69 of file points_map_filter_node.cpp.
References points_map_filter::Config::cell_side_length, config_, filtered_points_pub_, map_callback(), map_sub_, parameter_update_callback(), points_callback(), and points_sub_.
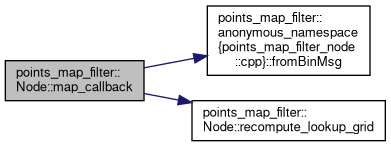
◆ map_callback()
| void points_map_filter::Node::map_callback | ( | autoware_lanelet2_msgs::msg::MapBin::UniquePtr | msg | ) |
Definition at line 194 of file points_map_filter_node.cpp.
References approximate_intersection::Config::cell_side_length, points_map_filter::Config::cell_side_length, config_, points_map_filter::anonymous_namespace{points_map_filter_node.cpp}::fromBinMsg(), lookup_grid_, map_, approximate_intersection::Config::max_x, approximate_intersection::Config::max_y, approximate_intersection::Config::min_x, approximate_intersection::Config::min_y, process_traj_logs::point, and recompute_lookup_grid().
Referenced by handle_on_configure().

◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult points_map_filter::Node::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
Example callback for dynamic parameter updates.
Definition at line 49 of file points_map_filter_node.cpp.
References points_map_filter::Config::cell_side_length, config_, lookup_grid_, and recompute_lookup_grid().
Referenced by handle_on_configure().


◆ points_callback()
| void points_map_filter::Node::points_callback | ( | sensor_msgs::msg::PointCloud2::UniquePtr | msg | ) |
Example subscription callback.
Definition at line 104 of file points_map_filter_node.cpp.
References filtered_points_pub_, and lookup_grid_.
Referenced by handle_on_configure().

◆ recompute_lookup_grid()
|
private |
Definition at line 175 of file points_map_filter_node.cpp.
References lookup_grid_, map_, and process_traj_logs::point.
Referenced by map_callback(), and parameter_update_callback().
Member Data Documentation
◆ config_
|
private |
Definition at line 51 of file points_map_filter_node.hpp.
Referenced by Node(), handle_on_configure(), map_callback(), and parameter_update_callback().
◆ filtered_points_pub_
|
private |
Definition at line 48 of file points_map_filter_node.hpp.
Referenced by handle_on_configure(), and points_callback().
◆ lookup_grid_
|
private |
Definition at line 56 of file points_map_filter_node.hpp.
Referenced by map_callback(), parameter_update_callback(), points_callback(), and recompute_lookup_grid().
◆ map_
|
private |
Definition at line 54 of file points_map_filter_node.hpp.
Referenced by map_callback(), and recompute_lookup_grid().
◆ map_sub_
|
private |
Definition at line 45 of file points_map_filter_node.hpp.
Referenced by handle_on_configure().
◆ points_sub_
|
private |
Definition at line 44 of file points_map_filter_node.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- points_map_filter/include/points_map_filter/points_map_filter_node.hpp
- points_map_filter/src/points_map_filter_node.cpp