#include <basic_autonomy.hpp>
Public Attributes | |
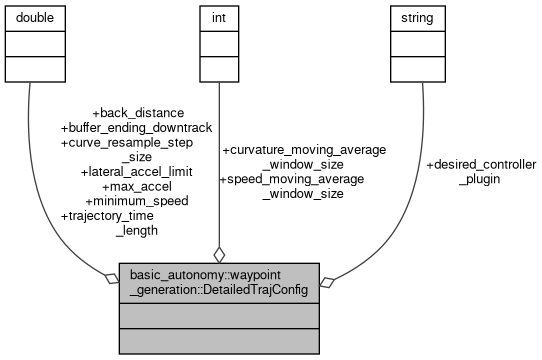
| double | trajectory_time_length = 6.0 |
| double | curve_resample_step_size = 1.0 |
| double | minimum_speed = 2.2352 |
| double | max_accel = 3 |
| double | lateral_accel_limit = 2.5 |
| int | speed_moving_average_window_size = 5 |
| int | curvature_moving_average_window_size = 9 |
| double | back_distance = 20 |
| double | buffer_ending_downtrack = 20.0 |
| std::string | desired_controller_plugin = "default" |
Detailed Description
Definition at line 79 of file basic_autonomy.hpp.
Member Data Documentation
◆ back_distance
| double basic_autonomy::waypoint_generation::DetailedTrajConfig::back_distance = 20 |
Definition at line 89 of file basic_autonomy.hpp.
Referenced by basic_autonomy::waypoint_generation::compose_detailed_trajectory_config(), and basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path().
◆ buffer_ending_downtrack
| double basic_autonomy::waypoint_generation::DetailedTrajConfig::buffer_ending_downtrack = 20.0 |
◆ curvature_moving_average_window_size
| int basic_autonomy::waypoint_generation::DetailedTrajConfig::curvature_moving_average_window_size = 9 |
Definition at line 87 of file basic_autonomy.hpp.
Referenced by basic_autonomy::waypoint_generation::compose_detailed_trajectory_config(), and basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path().
◆ curve_resample_step_size
| double basic_autonomy::waypoint_generation::DetailedTrajConfig::curve_resample_step_size = 1.0 |
Definition at line 82 of file basic_autonomy.hpp.
Referenced by basic_autonomy::waypoint_generation::compose_detailed_trajectory_config(), basic_autonomy::waypoint_generation::compose_lanechange_trajectory_from_path(), and basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path().
◆ desired_controller_plugin
| std::string basic_autonomy::waypoint_generation::DetailedTrajConfig::desired_controller_plugin = "default" |
Definition at line 91 of file basic_autonomy.hpp.
Referenced by basic_autonomy::waypoint_generation::compose_detailed_trajectory_config(), basic_autonomy::waypoint_generation::compose_lanechange_trajectory_from_path(), and basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path().
◆ lateral_accel_limit
| double basic_autonomy::waypoint_generation::DetailedTrajConfig::lateral_accel_limit = 2.5 |
Definition at line 85 of file basic_autonomy.hpp.
Referenced by basic_autonomy::waypoint_generation::compose_detailed_trajectory_config(), and basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path().
◆ max_accel
| double basic_autonomy::waypoint_generation::DetailedTrajConfig::max_accel = 3 |
Definition at line 84 of file basic_autonomy.hpp.
Referenced by basic_autonomy::waypoint_generation::compose_detailed_trajectory_config(), and basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path().
◆ minimum_speed
| double basic_autonomy::waypoint_generation::DetailedTrajConfig::minimum_speed = 2.2352 |
◆ speed_moving_average_window_size
| int basic_autonomy::waypoint_generation::DetailedTrajConfig::speed_moving_average_window_size = 5 |
Definition at line 86 of file basic_autonomy.hpp.
Referenced by basic_autonomy::waypoint_generation::compose_detailed_trajectory_config(), basic_autonomy::waypoint_generation::compose_lanechange_trajectory_from_path(), and basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path().
◆ trajectory_time_length
| double basic_autonomy::waypoint_generation::DetailedTrajConfig::trajectory_time_length = 6.0 |
Definition at line 81 of file basic_autonomy.hpp.
Referenced by basic_autonomy::waypoint_generation::compose_detailed_trajectory_config(), and basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path().
The documentation for this struct was generated from the following file:
- basic_autonomy/include/basic_autonomy/basic_autonomy.hpp