Classes | |
| struct | DetailedTrajConfig |
| struct | GeneralTrajConfig |
| struct | PointSpeedPair |
Functions | |
| std::vector< double > | apply_speed_limits (const std::vector< double > speeds, const std::vector< double > speed_limits) |
| Applies the provided speed limits to the provided speeds such that each element is capped at its corresponding speed limit if needed. More... | |
| Eigen::Isometry2d | compute_heading_frame (const lanelet::BasicPoint2d &p1, const lanelet::BasicPoint2d &p2) |
| Returns a 2D coordinate frame which is located at p1 and oriented so p2 lies on the +X axis. More... | |
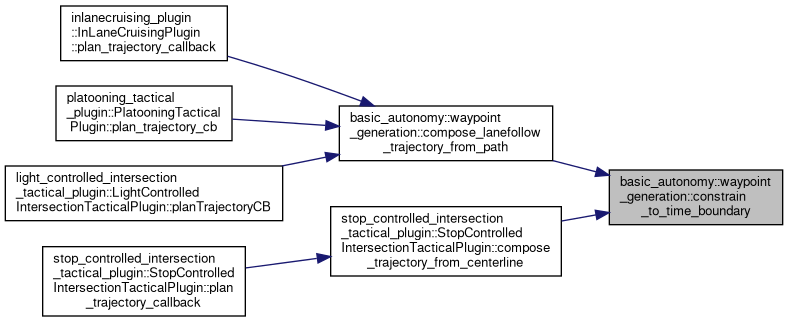
| std::vector< PointSpeedPair > | constrain_to_time_boundary (const std::vector< PointSpeedPair > &points, double time_span) |
| Reduces the input points to only those points that fit within the provided time boundary. More... | |
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > | constrain_to_time_boundary (const std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > &trajectory, double time_span) |
| Reduces the input points to only those points that fit within the provided time boundary. More... | |
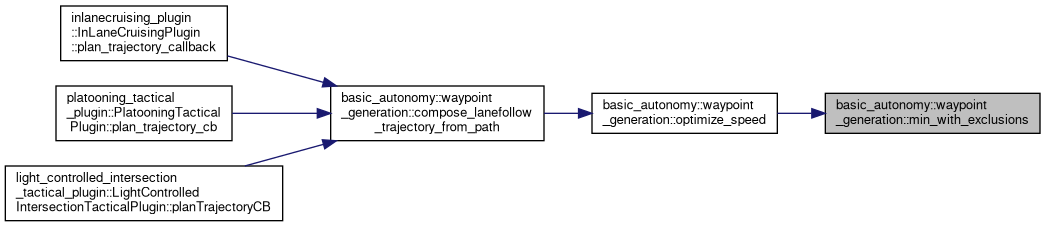
| std::pair< double, size_t > | min_with_exclusions (const std::vector< double > &values, const std::unordered_set< size_t > &excluded) |
| Returns the min, and its idx, from the vector of values, excluding given set of values. More... | |
| std::vector< double > | optimize_speed (const std::vector< double > &downtracks, const std::vector< double > &curv_speeds, double accel_limit) |
| Applies the longitudinal acceleration limit to each point's speed. More... | |
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > | trajectory_from_points_times_orientations (const std::vector< lanelet::BasicPoint2d > &points, const std::vector< double > ×, const std::vector< double > &yaws, rclcpp::Time startTime, const std::string &desired_controller_plugin) |
| Method combines input points, times, orientations, and an absolute start time to form a valid carma platform trajectory. More... | |
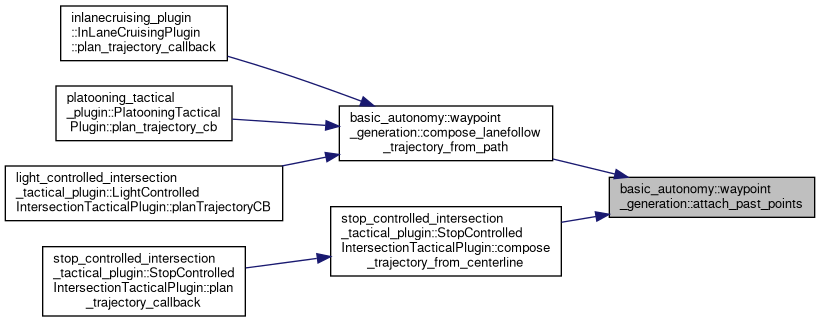
| std::vector< PointSpeedPair > | attach_past_points (const std::vector< PointSpeedPair > &points_set, std::vector< PointSpeedPair > future_points, const int nearest_pt_index, double back_distance) |
| Attaches back_distance length of points behind the future points. More... | |
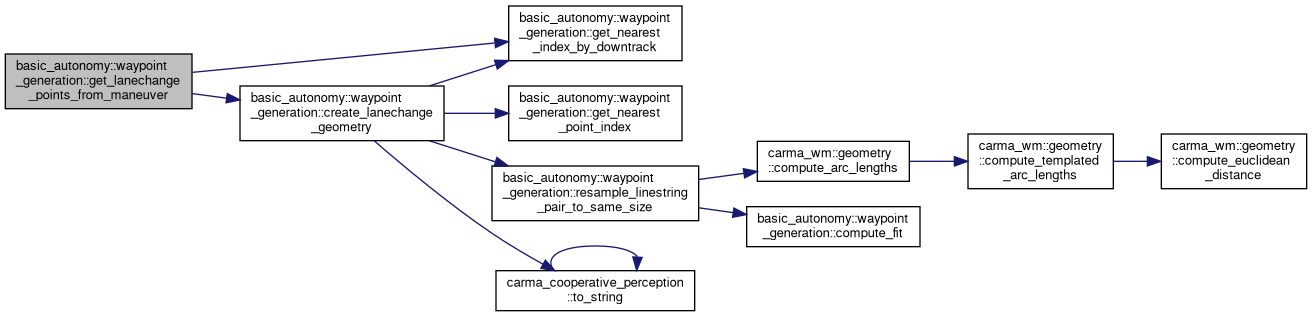
| std::unique_ptr< basic_autonomy::smoothing::SplineI > | compute_fit (const std::vector< lanelet::BasicPoint2d > &basic_points) |
| Computes a spline based on the provided points. More... | |
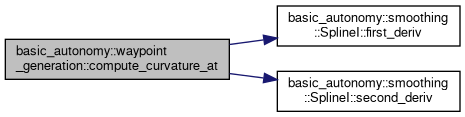
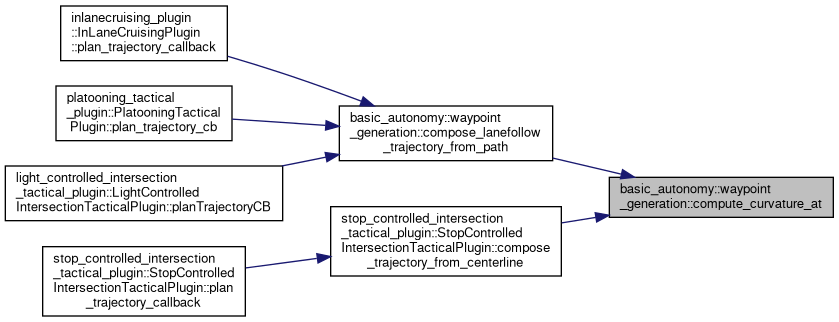
| double | compute_curvature_at (const basic_autonomy::smoothing::SplineI &fit_curve, double step_along_the_curve) |
| Given the curvature fit, computes the curvature at the given step along the curve. More... | |
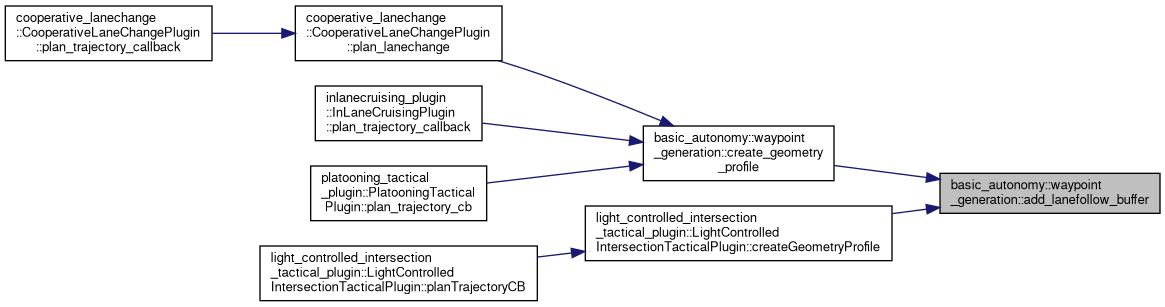
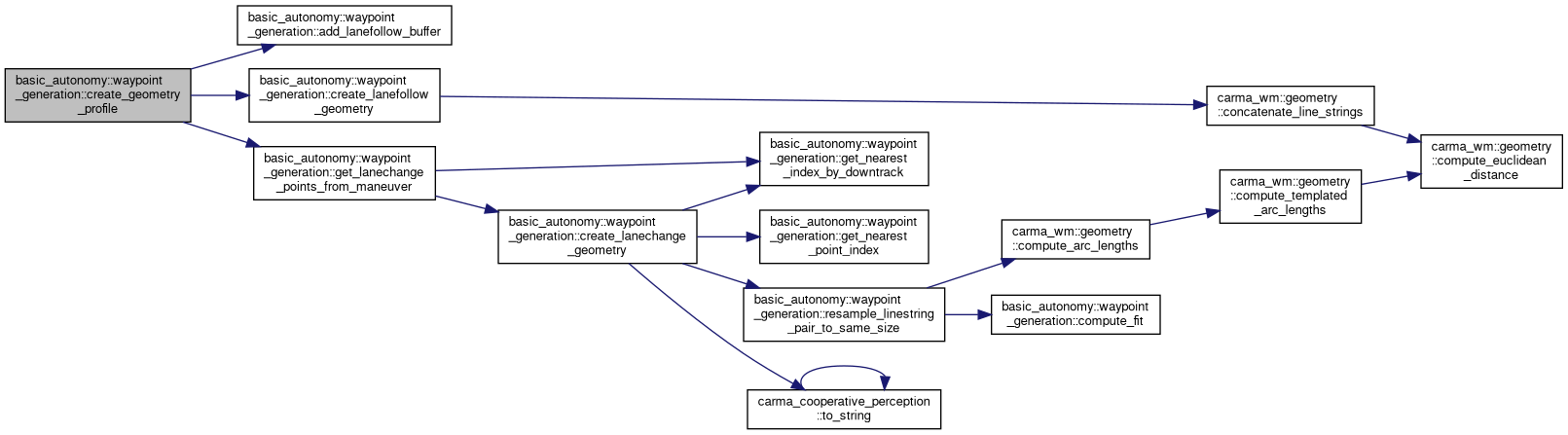
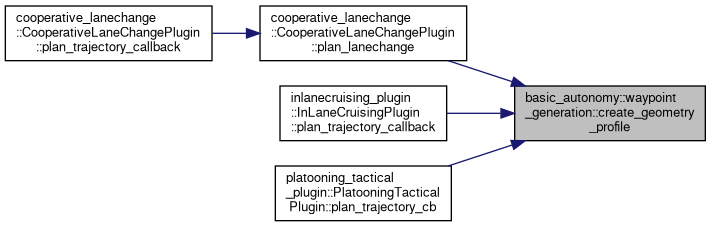
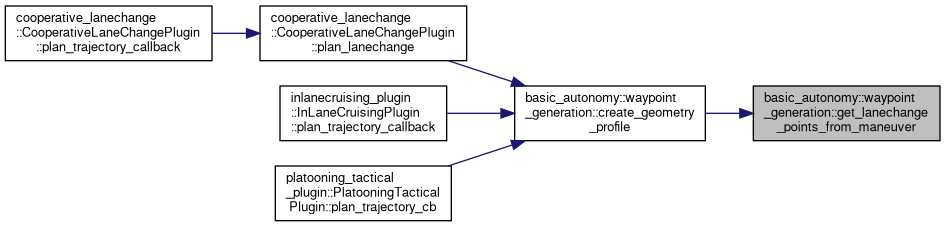
| std::vector< PointSpeedPair > | create_geometry_profile (const std::vector< carma_planning_msgs::msg::Maneuver > &maneuvers, double max_starting_downtrack, const carma_wm::WorldModelConstPtr &wm, carma_planning_msgs::msg::VehicleState &ending_state_before_buffer, const carma_planning_msgs::msg::VehicleState &state, const GeneralTrajConfig &general_config, const DetailedTrajConfig &detailed_config) |
| Creates geometry profile to return a point speed pair struct for LANE FOLLOW and LANE CHANGE maneuver types. More... | |
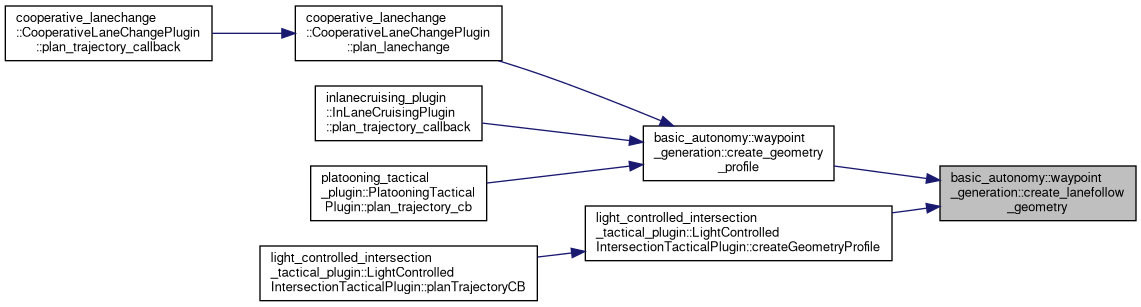
| std::vector< PointSpeedPair > | create_lanefollow_geometry (const carma_planning_msgs::msg::Maneuver &maneuver, double max_starting_downtrack, const carma_wm::WorldModelConstPtr &wm, const GeneralTrajConfig &general_config, const DetailedTrajConfig &detailed_config, std::unordered_set< lanelet::Id > &visited_lanelets) |
| Converts a set of requested LANE_FOLLOWING maneuvers to point speed limit pairs. More... | |
| std::vector< PointSpeedPair > | add_lanefollow_buffer (const carma_wm::WorldModelConstPtr &wm, std::vector< PointSpeedPair > &points_and_target_speeds, const std::vector< carma_planning_msgs::msg::Maneuver > &maneuvers, carma_planning_msgs::msg::VehicleState &ending_state_before_buffer, const DetailedTrajConfig &detailed_config) |
| Adds extra centerline points beyond required message length to lane follow maneuver points so that there's always enough points to calculate trajectory (BUFFER POINTS SHOULD BE REMOVED BEFORE RETURNING FINAL TRAJECTORY) More... | |
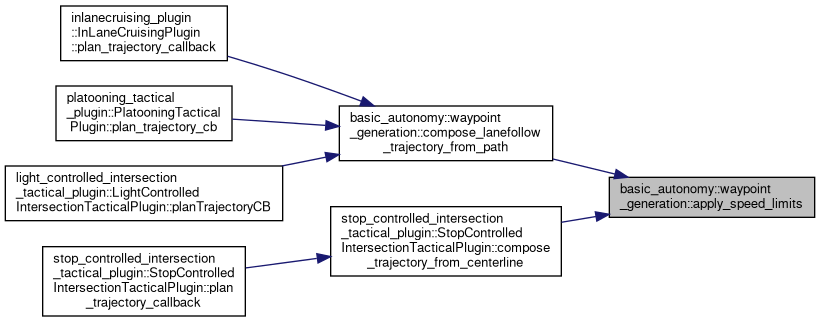
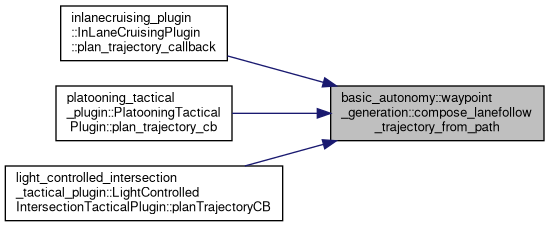
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > | compose_lanefollow_trajectory_from_path (const std::vector< PointSpeedPair > &points, const carma_planning_msgs::msg::VehicleState &state, const rclcpp::Time &state_time, const carma_wm::WorldModelConstPtr &wm, const carma_planning_msgs::msg::VehicleState &ending_state_before_buffer, carma_debug_ros2_msgs::msg::TrajectoryCurvatureSpeeds &debug_msg, const DetailedTrajConfig &detailed_config) |
| Method converts a list of lanelet centerline points and current vehicle state into a usable list of trajectory points for trajectory planning for a Lane following maneuver. More... | |
| std::vector< PointSpeedPair > | get_lanechange_points_from_maneuver (const carma_planning_msgs::msg::Maneuver &maneuver, double max_starting_downtrack, const carma_wm::WorldModelConstPtr &wm, carma_planning_msgs::msg::VehicleState &ending_state_before_buffer, const carma_planning_msgs::msg::VehicleState &state, const GeneralTrajConfig &general_config, const DetailedTrajConfig &detailed_config) |
| Converts a set of requested LANE_CHANGE maneuvers to point speed limit pairs. More... | |
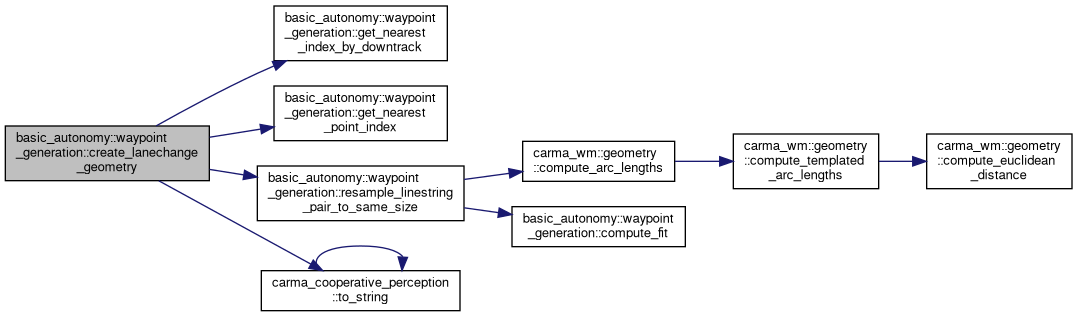
| std::vector< lanelet::BasicPoint2d > | create_lanechange_geometry (lanelet::Id starting_lane_id, lanelet::Id ending_lane_id, double starting_downtrack, double ending_downtrack, const carma_wm::WorldModelConstPtr &wm, int downsample_ratio, double buffer_ending_downtrack) |
| Creates a vector of lane change points using parameters defined. More... | |
| std::vector< std::vector< lanelet::BasicPoint2d > > | resample_linestring_pair_to_same_size (std::vector< lanelet::BasicPoint2d > &line_1, std::vector< lanelet::BasicPoint2d > &line_2) |
| Resamples a pair of basicpoint2d lines to get lines of same number of points. More... | |
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > | compose_lanechange_trajectory_from_path (const std::vector< PointSpeedPair > &points, const carma_planning_msgs::msg::VehicleState &state, const rclcpp::Time &state_time, const carma_wm::WorldModelConstPtr &wm, const carma_planning_msgs::msg::VehicleState &ending_state_before_buffer, const DetailedTrajConfig &detailed_config) |
| Method converts a list of lanelet centerline points and current vehicle state into a usable list of trajectory points for trajectory planning for a Lane following maneuver. More... | |
| std::vector< lanelet::BasicPoint2d > | create_route_geom (double starting_downtrack, int starting_lane_id, double ending_downtrack, const carma_wm::WorldModelConstPtr &wm) |
| Creates a Lanelet2 Linestring from a vector or points along the geometry. More... | |
| lanelet::BasicLineString2d | create_lanechange_path (const lanelet::ConstLanelet &start_lanelet, const lanelet::ConstLanelet &end_lanelet) |
| Given a start and end point, create a vector of points fit through a spline between the points (using a Spline library) More... | |
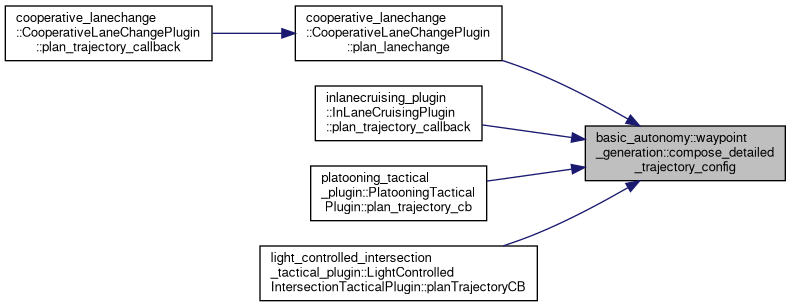
| DetailedTrajConfig | compose_detailed_trajectory_config (double trajectory_time_length, double curve_resample_step_size, double minimum_speed, double max_accel, double lateral_accel_limit, int speed_moving_average_window_size, int curvature_moving_average_window_size, double back_distance, double buffer_ending_downtrack, std::string desired_controller_plugin="default") |
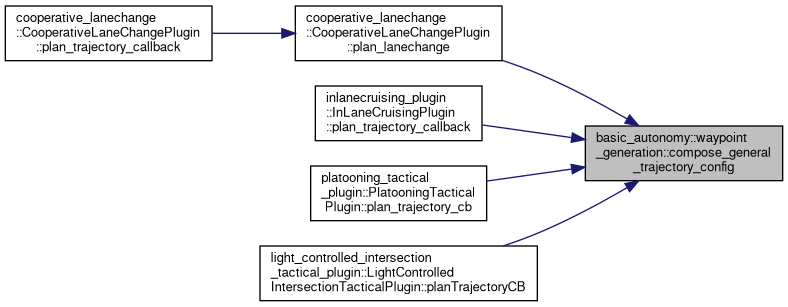
| GeneralTrajConfig | compose_general_trajectory_config (const std::string &trajectory_type, int default_downsample_ratio, int turn_downsample_ratio) |
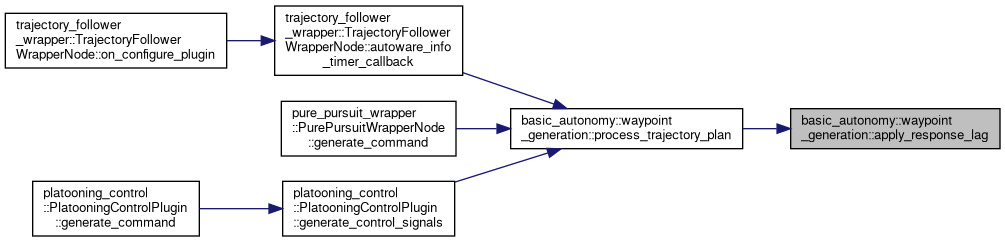
| autoware_auto_msgs::msg::Trajectory | process_trajectory_plan (const carma_planning_msgs::msg::TrajectoryPlan &tp, double vehicle_response_lag) |
| Given a carma type of trajectory_plan, generate autoware type of trajectory accounting for speed_lag and stopping case Generated trajectory is meant to be used in autoware.auto's pure_pursuit library using set_trajectory() function. More... | |
| std::vector< double > | apply_response_lag (const std::vector< double > &speeds, const std::vector< double > downtracks, double response_lag) |
| Applies a specified response lag in seconds to the trajectory shifting the whole thing by the specified lag time. More... | |
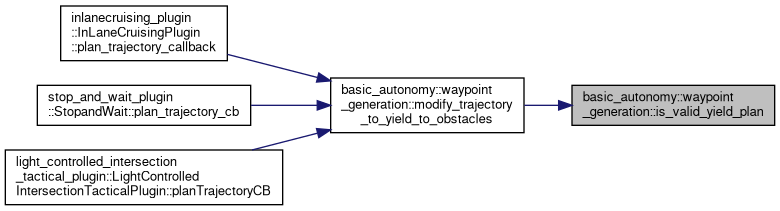
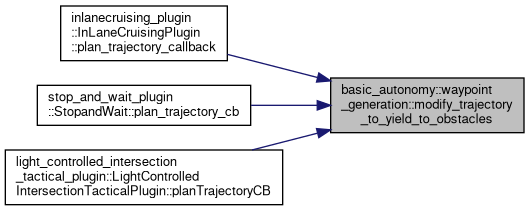
| carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr | modify_trajectory_to_yield_to_obstacles (const std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > &node_handler, const carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr &req, const carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr &resp, const carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > &yield_client, int yield_plugin_service_call_timeout) |
| Applies a yield trajectory to the original trajectory set in response. More... | |
| bool | is_valid_yield_plan (const std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > &node_handler, const carma_planning_msgs::msg::TrajectoryPlan &yield_plan) |
| Helper function to verify if the input yield trajectory plan is valid. More... | |
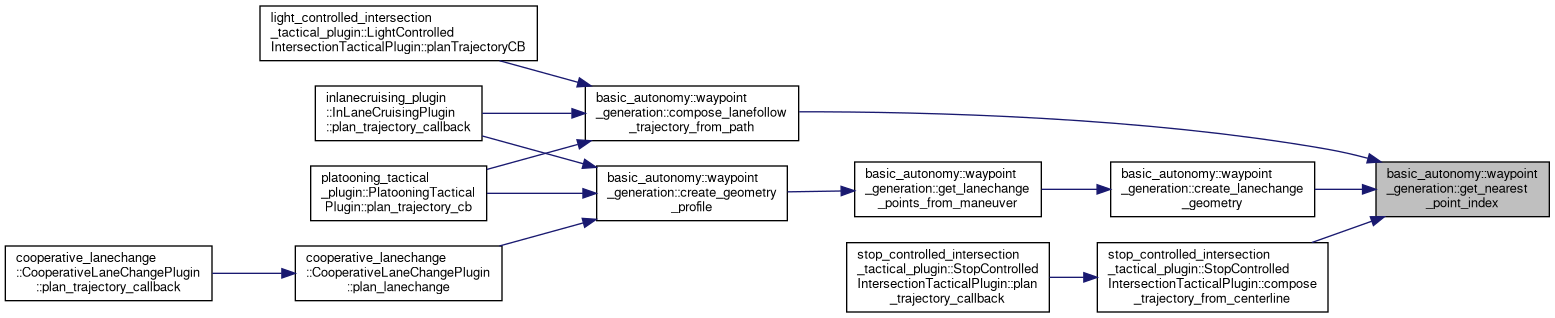
| int | get_nearest_point_index (const std::vector< lanelet::BasicPoint2d > &points, const carma_planning_msgs::msg::VehicleState &state) |
| Returns the nearest point (in terms of cartesian 2d distance) to the provided vehicle pose in the provided l. More... | |
| size_t | get_nearest_point_index (const std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > &trajectory, const lanelet::BasicPoint2d &position) |
| Find the index of the closest trajectory plan point to a given position. More... | |
| int | get_nearest_point_index (const std::vector< PointSpeedPair > &points, const carma_planning_msgs::msg::VehicleState &state) |
| Returns the nearest point (in terms of cartesian 2d distance) to the provided vehicle pose in the provided list. More... | |
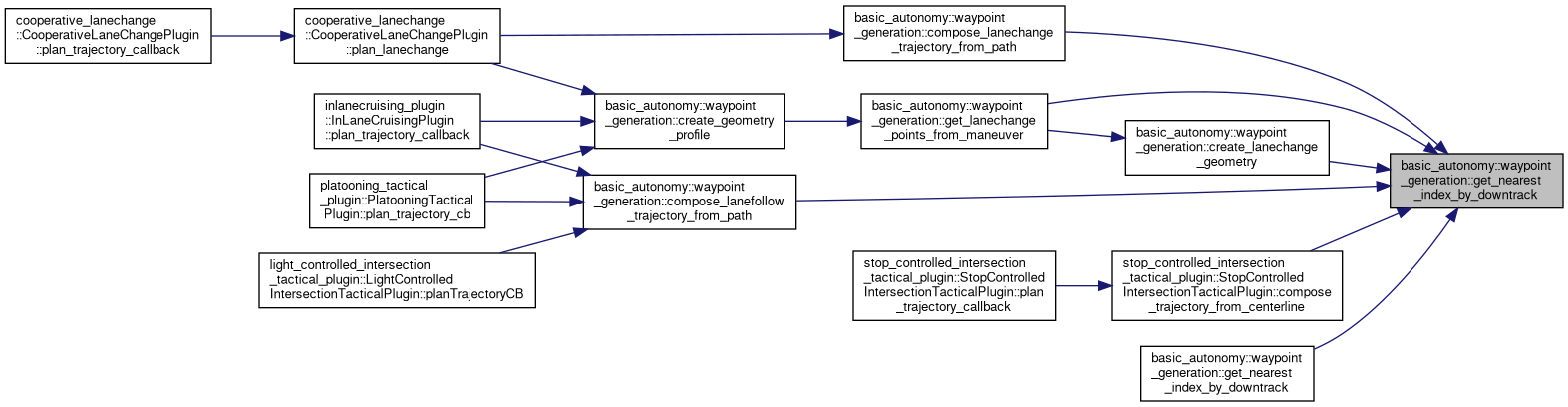
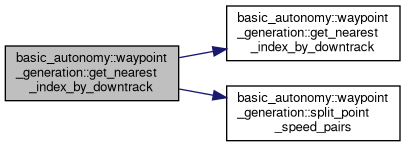
| int | get_nearest_index_by_downtrack (const std::vector< lanelet::BasicPoint2d > &points, const carma_wm::WorldModelConstPtr &wm, double target_downtrack) |
| Returns the nearest "less than" point to the provided vehicle pose in the provided list by utilizing the downtrack measured along the route NOTE: This function compares the downtrack, provided by routeTrackPos, of each points in the list to get the closest one to the given point's downtrack. Therefore, it is rather costlier method than comparing cartesian distance between the points and getting the closest. This way, however, the function correctly returns the end point's index if the given state, despite being valid, is farther than the given points and can technically be near any of them. More... | |
| void | split_point_speed_pairs (const std::vector< PointSpeedPair > &points, std::vector< lanelet::BasicPoint2d > *basic_points, std::vector< double > *speeds) |
| Helper method to split a list of PointSpeedPair into separate point and speed lists. More... | |
| int | get_nearest_index_by_downtrack (const std::vector< PointSpeedPair > &points, const carma_wm::WorldModelConstPtr &wm, const carma_planning_msgs::msg::VehicleState &state) |
| Overload: Returns the nearest point to the provided vehicle pose in the provided list by utilizing the downtrack measured along the route NOTE: This function compares the downtrack, provided by routeTrackPos, of each points in the list to get the closest one to the given point's downtrack. Therefore, it is rather costlier method than comparing cartesian distance between the points and getting the closest. This way, however, the function correctly returns the end point's index if the given state, despite being valid, is farther than the given points and can technically be near any of them. More... | |
| int | get_nearest_index_by_downtrack (const std::vector< lanelet::BasicPoint2d > &points, const carma_wm::WorldModelConstPtr &wm, const carma_planning_msgs::msg::VehicleState &state) |
| Overload: Returns the nearest point to the provided vehicle pose in the provided list by utilizing the downtrack measured along the route NOTE: This function compares the downtrack, provided by routeTrackPos, of each points in the list to get the closest one to the given point's downtrack. Therefore, it is rather costlier method than comparing cartesian distance between the points and getting the closest. This way, however, the function correctly returns the end point if the given state, despite being valid, is farther than the given points and can technically be near any of them. More... | |
| std::vector< lanelet::BasicPoint2d > | build_chain_centerline (const carma_wm::WorldModelConstPtr &wm, lanelet::ConstLanelet pivot, double backward_length, double forward_length) |
| Builds a centerline covering [pivot_end_point - backward_length, pivot_end_point + forward_length] by walking the pivot lanelet's own predecessor/successor chain in the routing graph. More... | |
| void | extrapolate_to_length (std::vector< lanelet::BasicPoint2d > ¢erline, double target_length, const std::string &description) |
| Pads a centerline out to target_length by extrapolating a straight line from its last known heading, if map connectivity could not supply enough real geometry (e.g. because a lanelet the lane change needed was closed or missing from the map). More... | |
Variables | |
| static const std::string | BASIC_AUTONOMY_LOGGER = "basic_autonomy" |
| const double | epsilon_ = 0.0000001 |
Function Documentation
◆ add_lanefollow_buffer()
| std::vector< PointSpeedPair > basic_autonomy::waypoint_generation::add_lanefollow_buffer | ( | const carma_wm::WorldModelConstPtr & | wm, |
| std::vector< PointSpeedPair > & | points_and_target_speeds, | ||
| const std::vector< carma_planning_msgs::msg::Maneuver > & | maneuvers, | ||
| carma_planning_msgs::msg::VehicleState & | ending_state_before_buffer, | ||
| const DetailedTrajConfig & | detailed_config | ||
| ) |
Adds extra centerline points beyond required message length to lane follow maneuver points so that there's always enough points to calculate trajectory (BUFFER POINTS SHOULD BE REMOVED BEFORE RETURNING FINAL TRAJECTORY)
- Parameters
-
wm Pointer to intialized world model for semantic map access points_and_target_speeds set of lane follow maneuver points to which buffer is added maneuvers The list of lane follow maneuvers which were converted to geometry points and associated speed ending_state_before_buffer reference to Vehicle state, which is state before applying extra points for curvature calculation that are removed later detailed_config Basic autonomy struct defined to load detailed config parameters from tactical plugins
- Returns
- List of centerline points paired with speed limits returned with added buffer
Definition at line 225 of file basic_autonomy.cpp.
References BASIC_AUTONOMY_LOGGER, basic_autonomy::waypoint_generation::DetailedTrajConfig::buffer_ending_downtrack, epsilon_, process_bag::i, basic_autonomy::waypoint_generation::PointSpeedPair::point, and basic_autonomy::waypoint_generation::PointSpeedPair::speed.
Referenced by create_geometry_profile(), and light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::createGeometryProfile().
◆ apply_response_lag()
| std::vector< double > basic_autonomy::waypoint_generation::apply_response_lag | ( | const std::vector< double > & | speeds, |
| const std::vector< double > | downtracks, | ||
| double | response_lag | ||
| ) |
Applies a specified response lag in seconds to the trajectory shifting the whole thing by the specified lag time.
- Parameters
-
speeds Velocity profile to shift. The first point should be the current vehicle speed downtrack Distance points for each velocity point. Should have the same size as speeds and start from 0 response_lag The lag in seconds before which the vehicle will not meaningfully accelerate
- Returns
- A Shifted trajectory
Definition at line 1316 of file basic_autonomy.cpp.
Referenced by process_trajectory_plan().
◆ apply_speed_limits()
| std::vector< double > basic_autonomy::waypoint_generation::apply_speed_limits | ( | const std::vector< double > | speeds, |
| const std::vector< double > | speed_limits | ||
| ) |
Applies the provided speed limits to the provided speeds such that each element is capped at its corresponding speed limit if needed.
- Parameters
-
speeds The speeds to limit speed_limits The speed limits to apply. Must have the same size as speeds
- Returns
- The capped speed limits. Has the same size as speeds
Definition at line 541 of file basic_autonomy.cpp.
References BASIC_AUTONOMY_LOGGER, and process_bag::i.
Referenced by compose_lanefollow_trajectory_from_path(), and stop_controlled_intersection_tactical_plugin::StopControlledIntersectionTacticalPlugin::compose_trajectory_from_centerline().
◆ attach_past_points()
| std::vector< PointSpeedPair > basic_autonomy::waypoint_generation::attach_past_points | ( | const std::vector< PointSpeedPair > & | points_set, |
| std::vector< PointSpeedPair > | future_points, | ||
| const int | nearest_pt_index, | ||
| double | back_distance | ||
| ) |
Attaches back_distance length of points behind the future points.
- Parameters
-
points_set all point speed pairs future_points future points before which to attach the points nearest_pt_index idx of the first future_point in points_set back_distance the back distance to be added, in meters
- Returns
- point speed pairs with back distance length of points in front of future points NOTE- used to add past points to future trajectory for smooth spline calculation
Definition at line 759 of file basic_autonomy.cpp.
References process_bag::i, and process_traj_logs::point.
Referenced by compose_lanefollow_trajectory_from_path(), and stop_controlled_intersection_tactical_plugin::StopControlledIntersectionTacticalPlugin::compose_trajectory_from_centerline().
◆ build_chain_centerline()
| std::vector< lanelet::BasicPoint2d > basic_autonomy::waypoint_generation::build_chain_centerline | ( | const carma_wm::WorldModelConstPtr & | wm, |
| lanelet::ConstLanelet | pivot, | ||
| double | backward_length, | ||
| double | forward_length | ||
| ) |
Builds a centerline covering [pivot_end_point - backward_length, pivot_end_point + forward_length] by walking the pivot lanelet's own predecessor/successor chain in the routing graph.
If the routing graph runs out of connected lanelets before reaching the requested length (e.g. a closed lanelet blocks further routing), this logs a warning and returns whatever centerline was actually reachable instead of throwing – the caller is responsible for padding the result out if a minimum length is required (see extrapolate_to_length below).
- Parameters
-
wm The carma world model, used to query the map's routing graph pivot The lanelet to build the centerline outward from backward_length The minimum distance the returned centerline must cover behind the end of pivot, gathered by walking pivot's predecessor chain forward_length The minimum distance the returned centerline must cover beyond the end of pivot, gathered by walking pivot's successor chain
- Returns
- The concatenated 2d centerline points of pivot and however many predecessor/successor lanelets were needed (and reachable) to satisfy backward_length and forward_length
Definition at line 147 of file helper_functions.cpp.
References BASIC_AUTONOMY_LOGGER, carma_wm::geometry::get_lanelet_centerline_length(), and process_bag::i.
Referenced by create_lanechange_geometry().


◆ compose_detailed_trajectory_config()
| DetailedTrajConfig basic_autonomy::waypoint_generation::compose_detailed_trajectory_config | ( | double | trajectory_time_length, |
| double | curve_resample_step_size, | ||
| double | minimum_speed, | ||
| double | max_accel, | ||
| double | lateral_accel_limit, | ||
| int | speed_moving_average_window_size, | ||
| int | curvature_moving_average_window_size, | ||
| double | back_distance, | ||
| double | buffer_ending_downtrack, | ||
| std::string | desired_controller_plugin = "default" |
||
| ) |
Definition at line 1057 of file basic_autonomy.cpp.
References basic_autonomy::waypoint_generation::DetailedTrajConfig::back_distance, basic_autonomy::waypoint_generation::DetailedTrajConfig::buffer_ending_downtrack, basic_autonomy::waypoint_generation::DetailedTrajConfig::curvature_moving_average_window_size, basic_autonomy::waypoint_generation::DetailedTrajConfig::curve_resample_step_size, basic_autonomy::waypoint_generation::DetailedTrajConfig::desired_controller_plugin, basic_autonomy::waypoint_generation::DetailedTrajConfig::lateral_accel_limit, basic_autonomy::waypoint_generation::DetailedTrajConfig::max_accel, basic_autonomy::waypoint_generation::DetailedTrajConfig::minimum_speed, basic_autonomy::waypoint_generation::DetailedTrajConfig::speed_moving_average_window_size, and basic_autonomy::waypoint_generation::DetailedTrajConfig::trajectory_time_length.
Referenced by light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::generateNewTrajectory(), cooperative_lanechange::CooperativeLaneChangePlugin::plan_lanechange(), inlanecruising_plugin::InLaneCruisingPlugin::plan_trajectory_callback(), and platooning_tactical_plugin::PlatooningTacticalPlugin::plan_trajectory_cb().
◆ compose_general_trajectory_config()
| GeneralTrajConfig basic_autonomy::waypoint_generation::compose_general_trajectory_config | ( | const std::string & | trajectory_type, |
| int | default_downsample_ratio, | ||
| int | turn_downsample_ratio | ||
| ) |
Definition at line 1084 of file basic_autonomy.cpp.
References basic_autonomy::waypoint_generation::GeneralTrajConfig::default_downsample_ratio, basic_autonomy::waypoint_generation::GeneralTrajConfig::trajectory_type, and basic_autonomy::waypoint_generation::GeneralTrajConfig::turn_downsample_ratio.
Referenced by light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::generateNewTrajectory(), cooperative_lanechange::CooperativeLaneChangePlugin::plan_lanechange(), inlanecruising_plugin::InLaneCruisingPlugin::plan_trajectory_callback(), and platooning_tactical_plugin::PlatooningTacticalPlugin::plan_trajectory_cb().
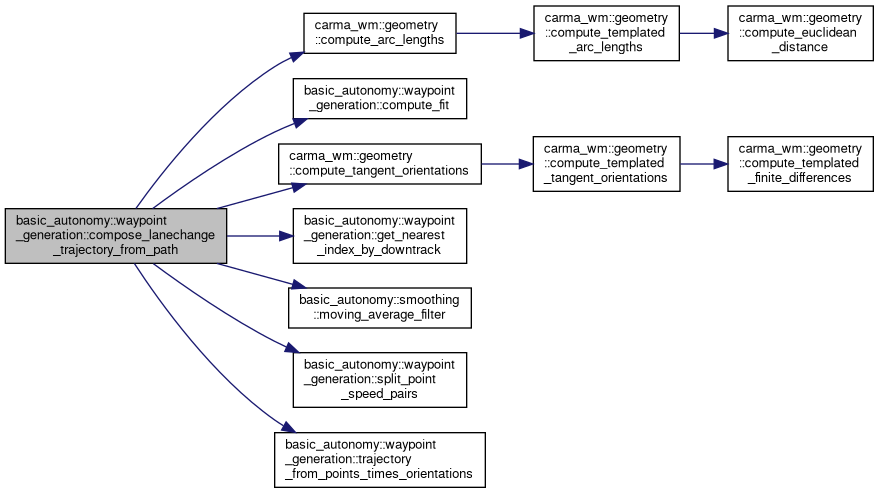
◆ compose_lanechange_trajectory_from_path()
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > basic_autonomy::waypoint_generation::compose_lanechange_trajectory_from_path | ( | const std::vector< PointSpeedPair > & | points, |
| const carma_planning_msgs::msg::VehicleState & | state, | ||
| const rclcpp::Time & | state_time, | ||
| const carma_wm::WorldModelConstPtr & | wm, | ||
| const carma_planning_msgs::msg::VehicleState & | ending_state_before_buffer, | ||
| const DetailedTrajConfig & | detailed_config | ||
| ) |
Method converts a list of lanelet centerline points and current vehicle state into a usable list of trajectory points for trajectory planning for a Lane following maneuver.
- Parameters
-
points The set of points that define the current lane the vehicle is in and are defined based on the request planning maneuvers. These points must be in the same lane as the vehicle and must extend in front of it though it is fine if they also extend behind it. state The current state of the vehicle state_time The abosolute time which the provided vehicle state corresponds to wm The carma world model object which the vehicle is operating in. ending_state_before_buffer The vehicle state before a buffer was added to the points. Used to revert the trajectory to required distance before returning.
- Returns
- A list of trajectory points to send to the carma planning stack
Definition at line 1099 of file basic_autonomy.cpp.
References BASIC_AUTONOMY_LOGGER, carma_wm::geometry::compute_arc_lengths(), compute_fit(), carma_wm::geometry::compute_tangent_orientations(), basic_autonomy::waypoint_generation::DetailedTrajConfig::curve_resample_step_size, basic_autonomy::waypoint_generation::DetailedTrajConfig::desired_controller_plugin, get_nearest_index_by_downtrack(), basic_autonomy::smoothing::moving_average_filter(), basic_autonomy::waypoint_generation::DetailedTrajConfig::speed_moving_average_window_size, split_point_speed_pairs(), and trajectory_from_points_times_orientations().
Referenced by cooperative_lanechange::CooperativeLaneChangePlugin::plan_lanechange().

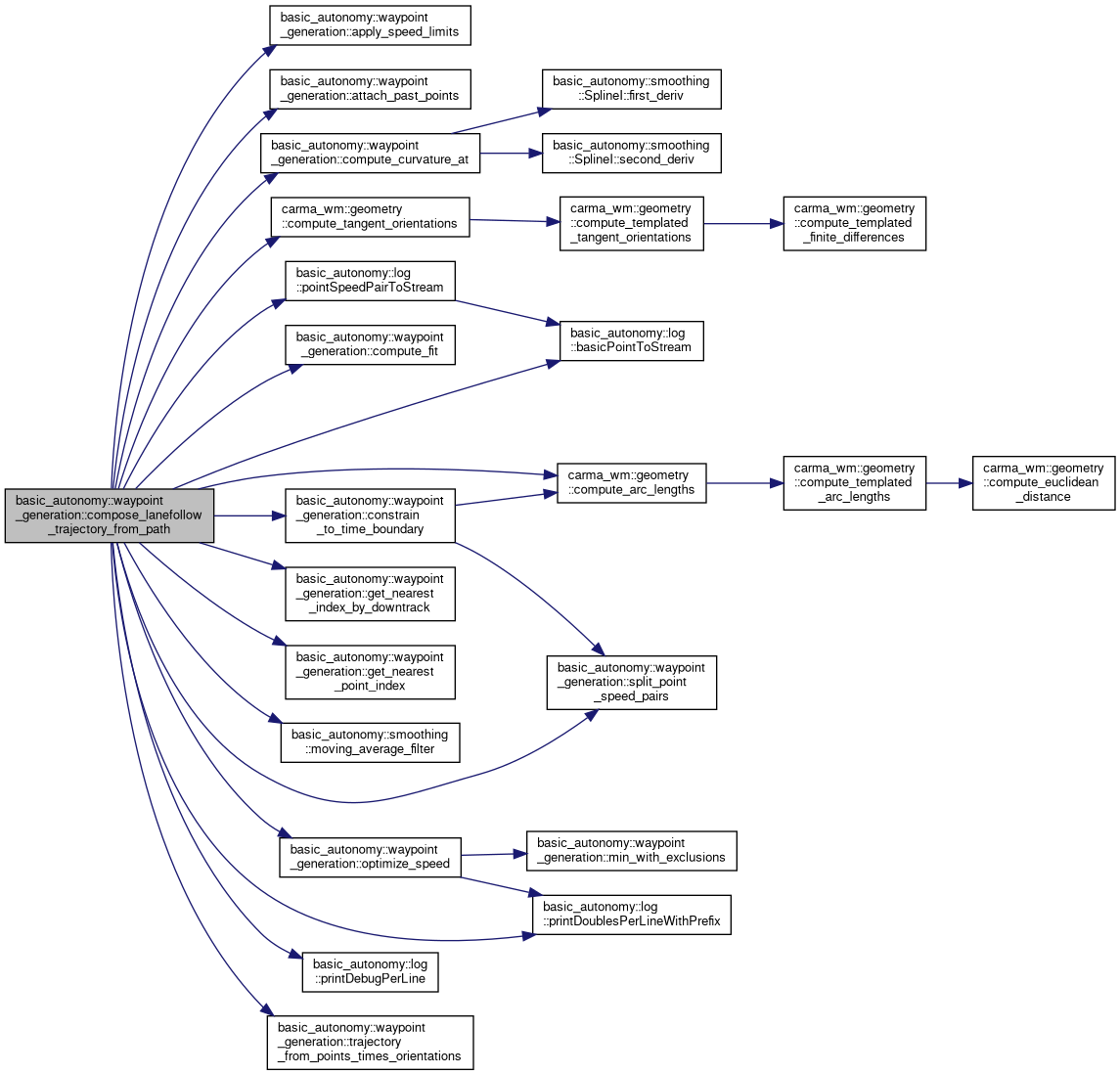
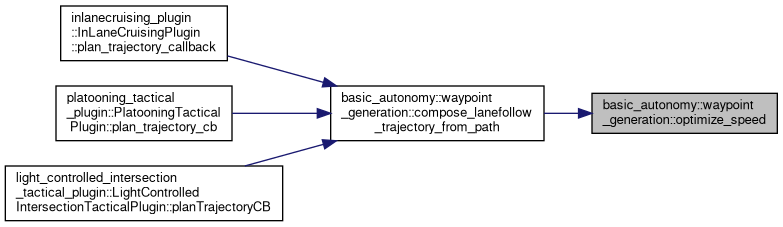
◆ compose_lanefollow_trajectory_from_path()
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path | ( | const std::vector< PointSpeedPair > & | points, |
| const carma_planning_msgs::msg::VehicleState & | state, | ||
| const rclcpp::Time & | state_time, | ||
| const carma_wm::WorldModelConstPtr & | wm, | ||
| const carma_planning_msgs::msg::VehicleState & | ending_state_before_buffer, | ||
| carma_debug_ros2_msgs::msg::TrajectoryCurvatureSpeeds & | debug_msg, | ||
| const DetailedTrajConfig & | detailed_config | ||
| ) |
Method converts a list of lanelet centerline points and current vehicle state into a usable list of trajectory points for trajectory planning for a Lane following maneuver.
- Parameters
-
points The set of points that define the current lane the vehicle is in and are defined based on the request planning maneuvers. These points must be in the same lane as the vehicle and must extend in front of it though it is fine if they also extend behind it. state The current state of the vehicle state_time The abosolute time which the provided vehicle state corresponds to
- Returns
- A list of trajectory points to send to the carma planning stack
Definition at line 840 of file basic_autonomy.cpp.
References apply_speed_limits(), attach_past_points(), basic_autonomy::waypoint_generation::DetailedTrajConfig::back_distance, BASIC_AUTONOMY_LOGGER, basic_autonomy::log::basicPointToStream(), process_traj_logs::c, carma_wm::geometry::compute_arc_lengths(), compute_curvature_at(), compute_fit(), carma_wm::geometry::compute_tangent_orientations(), constrain_to_time_boundary(), basic_autonomy::waypoint_generation::DetailedTrajConfig::curvature_moving_average_window_size, basic_autonomy::waypoint_generation::DetailedTrajConfig::curve_resample_step_size, basic_autonomy::waypoint_generation::DetailedTrajConfig::desired_controller_plugin, get_nearest_index_by_downtrack(), get_nearest_point_index(), basic_autonomy::waypoint_generation::DetailedTrajConfig::lateral_accel_limit, basic_autonomy::waypoint_generation::DetailedTrajConfig::max_accel, basic_autonomy::waypoint_generation::DetailedTrajConfig::minimum_speed, basic_autonomy::smoothing::moving_average_filter(), optimize_speed(), basic_autonomy::log::pointSpeedPairToStream(), basic_autonomy::log::printDebugPerLine(), basic_autonomy::log::printDoublesPerLineWithPrefix(), basic_autonomy::waypoint_generation::DetailedTrajConfig::speed_moving_average_window_size, split_point_speed_pairs(), trajectory_from_points_times_orientations(), basic_autonomy::waypoint_generation::DetailedTrajConfig::trajectory_time_length, osm_transform::x, and osm_transform::y.
Referenced by light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::generateNewTrajectory(), inlanecruising_plugin::InLaneCruisingPlugin::plan_trajectory_callback(), and platooning_tactical_plugin::PlatooningTacticalPlugin::plan_trajectory_cb().
◆ compute_curvature_at()
| double basic_autonomy::waypoint_generation::compute_curvature_at | ( | const basic_autonomy::smoothing::SplineI & | fit_curve, |
| double | step_along_the_curve | ||
| ) |
Given the curvature fit, computes the curvature at the given step along the curve.
- Parameters
-
step_along_the_curve Value in double from 0.0 (curvature start) to 1.0 (curvature end) representing where to calculate the curvature fit_curve curvature fit
- Returns
- Curvature (k = 1/r, 1/meter)
Definition at line 830 of file basic_autonomy.cpp.
References basic_autonomy::smoothing::SplineI::first_deriv(), and basic_autonomy::smoothing::SplineI::second_deriv().
Referenced by compose_lanefollow_trajectory_from_path(), and stop_controlled_intersection_tactical_plugin::StopControlledIntersectionTacticalPlugin::compose_trajectory_from_centerline().
◆ compute_fit()
| std::unique_ptr< basic_autonomy::smoothing::SplineI > basic_autonomy::waypoint_generation::compute_fit | ( | const std::vector< lanelet::BasicPoint2d > & | basic_points | ) |
Computes a spline based on the provided points.
- Parameters
-
basic_points The points to use for fitting the spline
- Returns
- A spline which has been fit to the provided points
Definition at line 784 of file basic_autonomy.cpp.
References BASIC_AUTONOMY_LOGGER.
Referenced by compose_lanechange_trajectory_from_path(), compose_lanefollow_trajectory_from_path(), stop_controlled_intersection_tactical_plugin::StopControlledIntersectionTacticalPlugin::compose_trajectory_from_centerline(), and resample_linestring_pair_to_same_size().

◆ compute_heading_frame()
| Eigen::Isometry2d basic_autonomy::waypoint_generation::compute_heading_frame | ( | const lanelet::BasicPoint2d & | p1, |
| const lanelet::BasicPoint2d & | p2 | ||
| ) |
Returns a 2D coordinate frame which is located at p1 and oriented so p2 lies on the +X axis.
- Parameters
-
p1 The origin point for the frame in the parent frame p2 A point in the parent frame that will define the +X axis relative to p1
- Returns
- A 2D coordinate frame transform
Definition at line 560 of file basic_autonomy.cpp.
References carma_wm::geometry::build2dEigenTransform().

◆ constrain_to_time_boundary() [1/2]
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > basic_autonomy::waypoint_generation::constrain_to_time_boundary | ( | const std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > & | trajectory, |
| double | time_span | ||
| ) |
Reduces the input points to only those points that fit within the provided time boundary.
- Parameters
-
trajectory The input trajectory plan point each with target_time time_span The time span in seconds which the output points will fit within
- Returns
- The subset of points that fit within time_span
Definition at line 568 of file basic_autonomy.cpp.
References BASIC_AUTONOMY_LOGGER.
◆ constrain_to_time_boundary() [2/2]
| std::vector< PointSpeedPair > basic_autonomy::waypoint_generation::constrain_to_time_boundary | ( | const std::vector< PointSpeedPair > & | points, |
| double | time_span | ||
| ) |
Reduces the input points to only those points that fit within the provided time boundary.
- Parameters
-
points The input point speed pairs to reduce time_span The time span in seconds which the output points will fit within
- Returns
- The subset of points that fit within time_span
Definition at line 609 of file basic_autonomy.cpp.
References BASIC_AUTONOMY_LOGGER, carma_wm::geometry::compute_arc_lengths(), and split_point_speed_pairs().
Referenced by compose_lanefollow_trajectory_from_path(), stop_controlled_intersection_tactical_plugin::StopControlledIntersectionTacticalPlugin::compose_trajectory_from_centerline(), and light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::planTrajectorySmoothing().

◆ create_geometry_profile()
| std::vector< PointSpeedPair > basic_autonomy::waypoint_generation::create_geometry_profile | ( | const std::vector< carma_planning_msgs::msg::Maneuver > & | maneuvers, |
| double | max_starting_downtrack, | ||
| const carma_wm::WorldModelConstPtr & | wm, | ||
| carma_planning_msgs::msg::VehicleState & | ending_state_before_buffer, | ||
| const carma_planning_msgs::msg::VehicleState & | state, | ||
| const GeneralTrajConfig & | general_config, | ||
| const DetailedTrajConfig & | detailed_config | ||
| ) |
Creates geometry profile to return a point speed pair struct for LANE FOLLOW and LANE CHANGE maneuver types.
- Parameters
-
maneuvers The list of maneuvers to convert to geometry points and calculate associated speed max_starting_downtrack The maximum downtrack that is allowed for the first maneuver. This should be set to the vehicle position or earlier. If the first maneuver exceeds this then it's downtrack will be shifted to this value. wm Pointer to intialized world model for semantic map access ending_state_before_buffer reference to Vehicle state, which is state before applying extra points for curvature calculation that are removed later state The vehicle state at the time the function is called general_config Basic autonomy struct defined to load general config parameters from tactical plugins detailed_config Basic autonomy struct defined to load detailed config parameters from tactical plugins
- Returns
- A vector of point speed pair struct which contains geometry points as basicpoint::lanelet2d and speed as a double for the maneuver
Definition at line 24 of file basic_autonomy.cpp.
References add_lanefollow_buffer(), BASIC_AUTONOMY_LOGGER, create_lanefollow_geometry(), get_lanechange_points_from_maneuver(), and GET_MANEUVER_PROPERTY.
Referenced by cooperative_lanechange::CooperativeLaneChangePlugin::plan_lanechange(), inlanecruising_plugin::InLaneCruisingPlugin::plan_trajectory_callback(), and platooning_tactical_plugin::PlatooningTacticalPlugin::plan_trajectory_cb().
◆ create_lanechange_geometry()
| std::vector< lanelet::BasicPoint2d > basic_autonomy::waypoint_generation::create_lanechange_geometry | ( | lanelet::Id | starting_lane_id, |
| lanelet::Id | ending_lane_id, | ||
| double | starting_downtrack, | ||
| double | ending_downtrack, | ||
| const carma_wm::WorldModelConstPtr & | wm, | ||
| int | downsample_ratio, | ||
| double | buffer_ending_downtrack | ||
| ) |
Creates a vector of lane change points using parameters defined.
- Parameters
-
starting_lane_id lanelet id for where lane change plan should start ending_lane_id lanelet id for where lane change plan should end starting_downtrack The downtrack distance from which the lane change maneuver starts ending_downtrack The downtrack distance at which the lane change maneuver end wm Pointer to intialized world model for semantic map access downsample_ratio TODO: add description buffer_ending_downtrack The additional downtrack beyond requested end dist used to fit points along spline
- Returns
- A vector of geometry points as lanelet::basicpoint2d
Definition at line 319 of file basic_autonomy.cpp.
References build_chain_centerline(), extrapolate_to_length(), get_nearest_index_by_downtrack(), get_nearest_point_index(), process_bag::i, resample_linestring_pair_to_same_size(), and carma_cooperative_perception::to_string().
Referenced by get_lanechange_points_from_maneuver().

◆ create_lanechange_path()
| lanelet::BasicLineString2d basic_autonomy::waypoint_generation::create_lanechange_path | ( | const lanelet::ConstLanelet & | start_lanelet, |
| const lanelet::ConstLanelet & | end_lanelet | ||
| ) |
Given a start and end point, create a vector of points fit through a spline between the points (using a Spline library)
- Parameters
-
start_lanelet The lanelet from which lane change starts end_lanelet The lanelet in which lane change ends
- Returns
- A linestring path from start to end fit through Spline Library
◆ create_lanefollow_geometry()
| std::vector< PointSpeedPair > basic_autonomy::waypoint_generation::create_lanefollow_geometry | ( | const carma_planning_msgs::msg::Maneuver & | maneuver, |
| double | max_starting_downtrack, | ||
| const carma_wm::WorldModelConstPtr & | wm, | ||
| const GeneralTrajConfig & | general_config, | ||
| const DetailedTrajConfig & | detailed_config, | ||
| std::unordered_set< lanelet::Id > & | visited_lanelets | ||
| ) |
Converts a set of requested LANE_FOLLOWING maneuvers to point speed limit pairs.
- Parameters
-
maneuvers The list of maneuvers to convert geometry points and calculate associated speed max_starting_downtrack The maximum downtrack that is allowed for the first maneuver. This should be set to the vehicle position or earlier. If the first maneuver exceeds this then it's downtrack will be shifted to this value. wm Pointer to intialized world model for semantic map access general_config Basic autonomy struct defined to load general config parameters from tactical plugins detailed_config Basic autonomy struct defined to load detailed config parameters from tactical plugins
- Returns
- List of centerline points paired with speed limits
Definition at line 68 of file basic_autonomy.cpp.
References BASIC_AUTONOMY_LOGGER, carma_wm::geometry::concatenate_line_strings(), basic_autonomy::waypoint_generation::GeneralTrajConfig::default_downsample_ratio, process_bag::i, basic_autonomy::waypoint_generation::PointSpeedPair::point, basic_autonomy::waypoint_generation::PointSpeedPair::speed, and basic_autonomy::waypoint_generation::GeneralTrajConfig::turn_downsample_ratio.
Referenced by create_geometry_profile(), and light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::createGeometryProfile().

◆ create_route_geom()
| std::vector< lanelet::BasicPoint2d > basic_autonomy::waypoint_generation::create_route_geom | ( | double | starting_downtrack, |
| int | starting_lane_id, | ||
| double | ending_downtrack, | ||
| const carma_wm::WorldModelConstPtr & | wm | ||
| ) |
Creates a Lanelet2 Linestring from a vector or points along the geometry.
- Parameters
-
starting_downtrack downtrack along route where maneuver starts ending_downtrack downtrack along route where maneuver starts wm Pointer to intialized world model for semantic map access
- Returns
- Points in a path from starting downtrack to ending downtrack
◆ extrapolate_to_length()
| void basic_autonomy::waypoint_generation::extrapolate_to_length | ( | std::vector< lanelet::BasicPoint2d > & | centerline, |
| double | target_length, | ||
| const std::string & | description | ||
| ) |
Pads a centerline out to target_length by extrapolating a straight line from its last known heading, if map connectivity could not supply enough real geometry (e.g. because a lanelet the lane change needed was closed or missing from the map).
This is a last-resort fallback so that lane change trajectory generation always produces a usable result rather than throwing when the map has a gap – the extrapolated portion is only a straight-line approximation, but it lets the rest of the system (and, most importantly, the vehicle) keep moving instead of hitting an uncaught exception that stalls trajectory planning entirely.
- Parameters
-
centerline The centerline to pad, in place, if it falls short of target_length target_length The minimum 2d arc length centerline must cover after this call description A human-readable description of what centerline represents, used in log/exception messages
Definition at line 239 of file helper_functions.cpp.
References BASIC_AUTONOMY_LOGGER, and carma_wm::geometry::compute_arc_lengths().
Referenced by create_lanechange_geometry().


◆ get_lanechange_points_from_maneuver()
| std::vector< PointSpeedPair > basic_autonomy::waypoint_generation::get_lanechange_points_from_maneuver | ( | const carma_planning_msgs::msg::Maneuver & | maneuver, |
| double | max_starting_downtrack, | ||
| const carma_wm::WorldModelConstPtr & | wm, | ||
| carma_planning_msgs::msg::VehicleState & | ending_state_before_buffer, | ||
| const carma_planning_msgs::msg::VehicleState & | state, | ||
| const GeneralTrajConfig & | general_config, | ||
| const DetailedTrajConfig & | detailed_config | ||
| ) |
Converts a set of requested LANE_CHANGE maneuvers to point speed limit pairs.
- Parameters
-
maneuvers The list of maneuvers to convert max_starting_downtrack The maximum downtrack that is allowed for the first maneuver. This should be set to the vehicle position or earlier. If the first maneuver exceeds this then it's downtrack will be shifted to this value. wm Pointer to intialized world model for semantic map access ending_state_before_buffer reference to Vehicle state, which is state before applying extra points for curvature calculation that are removed later state The vehicle state at the time the function is called general_config Basic autonomy struct defined to load general config parameters from tactical plugins detailed_config Basic autonomy struct defined to load detailed config parameters from tactical plugins
- Returns
- A vector of point speed pair struct which contains geometry points as basicpoint::lanelet2d and speed as a double for the maneuver
Definition at line 469 of file basic_autonomy.cpp.
References BASIC_AUTONOMY_LOGGER, basic_autonomy::waypoint_generation::DetailedTrajConfig::buffer_ending_downtrack, create_lanechange_geometry(), basic_autonomy::waypoint_generation::GeneralTrajConfig::default_downsample_ratio, get_nearest_index_by_downtrack(), basic_autonomy::waypoint_generation::DetailedTrajConfig::minimum_speed, basic_autonomy::waypoint_generation::PointSpeedPair::point, and basic_autonomy::waypoint_generation::PointSpeedPair::speed.
Referenced by create_geometry_profile().
◆ get_nearest_index_by_downtrack() [1/3]
| int basic_autonomy::waypoint_generation::get_nearest_index_by_downtrack | ( | const std::vector< lanelet::BasicPoint2d > & | points, |
| const carma_wm::WorldModelConstPtr & | wm, | ||
| const carma_planning_msgs::msg::VehicleState & | state | ||
| ) |
Overload: Returns the nearest point to the provided vehicle pose in the provided list by utilizing the downtrack measured along the route NOTE: This function compares the downtrack, provided by routeTrackPos, of each points in the list to get the closest one to the given point's downtrack. Therefore, it is rather costlier method than comparing cartesian distance between the points and getting the closest. This way, however, the function correctly returns the end point if the given state, despite being valid, is farther than the given points and can technically be near any of them.
- Parameters
-
points The points to evaluate state The current vehicle state wm The carma world model
- Returns
- index of nearest point in points
Definition at line 139 of file helper_functions.cpp.
References get_nearest_index_by_downtrack().

◆ get_nearest_index_by_downtrack() [2/3]
| int basic_autonomy::waypoint_generation::get_nearest_index_by_downtrack | ( | const std::vector< lanelet::BasicPoint2d > & | points, |
| const carma_wm::WorldModelConstPtr & | wm, | ||
| double | target_downtrack | ||
| ) |
Returns the nearest "less than" point to the provided vehicle pose in the provided list by utilizing the downtrack measured along the route NOTE: This function compares the downtrack, provided by routeTrackPos, of each points in the list to get the closest one to the given point's downtrack. Therefore, it is rather costlier method than comparing cartesian distance between the points and getting the closest. This way, however, the function correctly returns the end point's index if the given state, despite being valid, is farther than the given points and can technically be near any of them.
- Parameters
-
points BasicLineString2d points target_downtrack target downtrack along the route to get index near to
- Returns
- index of nearest point in points with a downtrack less than 'target_downtrack', or -1 if the received 'points' vector is empty.
Definition at line 88 of file helper_functions.cpp.
References BASIC_AUTONOMY_LOGGER, and process_traj_logs::point.
Referenced by compose_lanechange_trajectory_from_path(), compose_lanefollow_trajectory_from_path(), stop_controlled_intersection_tactical_plugin::StopControlledIntersectionTacticalPlugin::compose_trajectory_from_centerline(), create_lanechange_geometry(), get_lanechange_points_from_maneuver(), and get_nearest_index_by_downtrack().
◆ get_nearest_index_by_downtrack() [3/3]
| int basic_autonomy::waypoint_generation::get_nearest_index_by_downtrack | ( | const std::vector< PointSpeedPair > & | points, |
| const carma_wm::WorldModelConstPtr & | wm, | ||
| const carma_planning_msgs::msg::VehicleState & | state | ||
| ) |
Overload: Returns the nearest point to the provided vehicle pose in the provided list by utilizing the downtrack measured along the route NOTE: This function compares the downtrack, provided by routeTrackPos, of each points in the list to get the closest one to the given point's downtrack. Therefore, it is rather costlier method than comparing cartesian distance between the points and getting the closest. This way, however, the function correctly returns the end point's index if the given state, despite being valid, is farther than the given points and can technically be near any of them.
- Parameters
-
points The points and speed pairs to evaluate state The current vehicle state wm The carma world model
- Returns
- index of nearest point in points
Definition at line 128 of file helper_functions.cpp.
References get_nearest_index_by_downtrack(), and split_point_speed_pairs().
◆ get_nearest_point_index() [1/3]
| size_t basic_autonomy::waypoint_generation::get_nearest_point_index | ( | const std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > & | trajectory, |
| const lanelet::BasicPoint2d & | position | ||
| ) |
Find the index of the closest trajectory plan point to a given position.
This function iterates through the trajectory points and determines the one closest to the provided 2D position.
- Parameters
-
trajectory A vector of trajectory plan points. position The reference 2D point.
- Returns
- The index of the trajectory point closest to the given position.
Definition at line 66 of file helper_functions.cpp.
References process_bag::i.
◆ get_nearest_point_index() [2/3]
| int basic_autonomy::waypoint_generation::get_nearest_point_index | ( | const std::vector< lanelet::BasicPoint2d > & | points, |
| const carma_planning_msgs::msg::VehicleState & | state | ||
| ) |
Returns the nearest point (in terms of cartesian 2d distance) to the provided vehicle pose in the provided l.
- Parameters
-
points The points to evaluate state The current vehicle state
- Returns
- index of nearest point in points
Definition at line 25 of file helper_functions.cpp.
References process_bag::i.
Referenced by compose_lanefollow_trajectory_from_path(), stop_controlled_intersection_tactical_plugin::StopControlledIntersectionTacticalPlugin::compose_trajectory_from_centerline(), create_lanechange_geometry(), yield_plugin::YieldPlugin::plan_trajectory_callback(), and light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::planTrajectorySmoothing().
◆ get_nearest_point_index() [3/3]
| int basic_autonomy::waypoint_generation::get_nearest_point_index | ( | const std::vector< PointSpeedPair > & | points, |
| const carma_planning_msgs::msg::VehicleState & | state | ||
| ) |
Returns the nearest point (in terms of cartesian 2d distance) to the provided vehicle pose in the provided list.
- Parameters
-
points The points to evaluate state The current vehicle state
- Returns
- index of nearest point in points
Definition at line 45 of file helper_functions.cpp.
References BASIC_AUTONOMY_LOGGER, and process_bag::i.
◆ is_valid_yield_plan()
| bool basic_autonomy::waypoint_generation::is_valid_yield_plan | ( | const std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > & | node_handler, |
| const carma_planning_msgs::msg::TrajectoryPlan & | yield_plan | ||
| ) |
Helper function to verify if the input yield trajectory plan is valid.
- Parameters
-
node_handler node of which time to compare against the trajectory's time yield_plan input yield trajectory plan
- Returns
- true or false
Definition at line 1335 of file basic_autonomy.cpp.
References carma_cooperative_perception::to_string().
Referenced by modify_trajectory_to_yield_to_obstacles().

◆ min_with_exclusions()
| std::pair< double, size_t > basic_autonomy::waypoint_generation::min_with_exclusions | ( | const std::vector< double > & | values, |
| const std::unordered_set< size_t > & | excluded | ||
| ) |
Returns the min, and its idx, from the vector of values, excluding given set of values.
- Parameters
-
values vector of values excluded set of excluded values
- Returns
- minimum value and its idx
Definition at line 645 of file basic_autonomy.cpp.
References process_bag::i.
Referenced by optimize_speed().
◆ modify_trajectory_to_yield_to_obstacles()
| carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr basic_autonomy::waypoint_generation::modify_trajectory_to_yield_to_obstacles | ( | const std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > & | node_handler, |
| const carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr & | req, | ||
| const carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr & | resp, | ||
| const carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > & | yield_client, | ||
| int | yield_plugin_service_call_timeout | ||
| ) |
Applies a yield trajectory to the original trajectory set in response.
- Parameters
-
node_handler a node interface to use the logger and time req The service request containing the maneuvers to plan trajectories for and current vehicle state resp The original response containing the planned trajectory to be modified yield_client yield_client to call for yield_plugin_service_call_timeout yield client's timeout in milliseconds int
- Returns
- The original response modified to contain the modified planned trajectory
Definition at line 1360 of file basic_autonomy.cpp.
References is_valid_yield_plan().
Referenced by inlanecruising_plugin::InLaneCruisingPlugin::plan_trajectory_callback(), stop_and_wait_plugin::StopandWait::plan_trajectory_cb(), and light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::planTrajectoryCB().

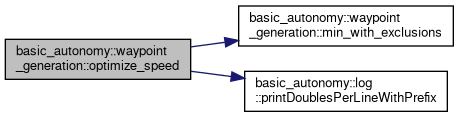
◆ optimize_speed()
| std::vector< double > basic_autonomy::waypoint_generation::optimize_speed | ( | const std::vector< double > & | downtracks, |
| const std::vector< double > & | curv_speeds, | ||
| double | accel_limit | ||
| ) |
Applies the longitudinal acceleration limit to each point's speed.
- Parameters
-
downtracks downtrack distances corresponding to each speed curv_speeds vehicle velocity in m/s. accel_limit vehicle longitudinal acceleration in m/s^2.
- Returns
- optimized speeds for each dowtrack points that satisfies longitudinal acceleration
Definition at line 665 of file basic_autonomy.cpp.
References visualize_xodr::dx, process_bag::i, min_with_exclusions(), and basic_autonomy::log::printDoublesPerLineWithPrefix().
Referenced by compose_lanefollow_trajectory_from_path().
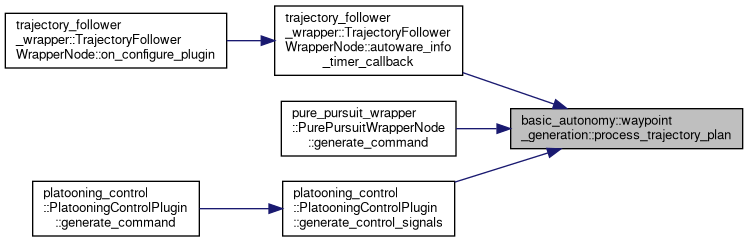
◆ process_trajectory_plan()
| autoware_auto_msgs::msg::Trajectory basic_autonomy::waypoint_generation::process_trajectory_plan | ( | const carma_planning_msgs::msg::TrajectoryPlan & | tp, |
| double | vehicle_response_lag | ||
| ) |
Given a carma type of trajectory_plan, generate autoware type of trajectory accounting for speed_lag and stopping case Generated trajectory is meant to be used in autoware.auto's pure_pursuit library using set_trajectory() function.
- Parameters
-
tp trajectory plan from tactical plugins
- Returns
- trajectory plan of autoware_auto_msgs type
Definition at line 1215 of file basic_autonomy.cpp.
References apply_response_lag(), BASIC_AUTONOMY_LOGGER, process_bag::i, osm_transform::x, and osm_transform::y.
Referenced by trajectory_follower_wrapper::TrajectoryFollowerWrapperNode::autoware_info_timer_callback(), pure_pursuit_wrapper::PurePursuitWrapperNode::generate_command(), and platooning_control::PlatooningControlPlugin::generate_control_signals().

◆ resample_linestring_pair_to_same_size()
| std::vector< std::vector< lanelet::BasicPoint2d > > basic_autonomy::waypoint_generation::resample_linestring_pair_to_same_size | ( | std::vector< lanelet::BasicPoint2d > & | line_1, |
| std::vector< lanelet::BasicPoint2d > & | line_2 | ||
| ) |
Resamples a pair of basicpoint2d lines to get lines of same number of points.
- Parameters
-
line_1 a vector of points to be resampled line_2 a vector of points to be resampled
- Returns
- A 2d vector with input lines resampled at same rate. The first iteration is the resampled line_1 and the resampled line_2 is the second iteration Assumption here is for lane change to happen between two adjacent lanelets, they must share a lane boundary (linestring)
Definition at line 407 of file basic_autonomy.cpp.
References BASIC_AUTONOMY_LOGGER, carma_wm::geometry::compute_arc_lengths(), compute_fit(), and process_bag::i.
Referenced by create_lanechange_geometry().


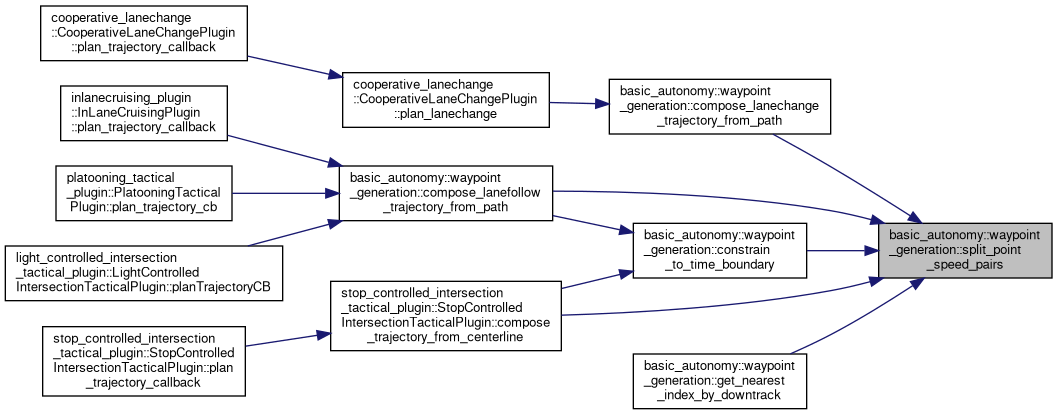
◆ split_point_speed_pairs()
| void basic_autonomy::waypoint_generation::split_point_speed_pairs | ( | const std::vector< PointSpeedPair > & | points, |
| std::vector< lanelet::BasicPoint2d > * | basic_points, | ||
| std::vector< double > * | speeds | ||
| ) |
Helper method to split a list of PointSpeedPair into separate point and speed lists.
- Parameters
-
points Point Speed pair to split basic_points points vector to be filled speeds speeds vector to be filled
Definition at line 114 of file helper_functions.cpp.
Referenced by compose_lanechange_trajectory_from_path(), compose_lanefollow_trajectory_from_path(), stop_controlled_intersection_tactical_plugin::StopControlledIntersectionTacticalPlugin::compose_trajectory_from_centerline(), constrain_to_time_boundary(), and get_nearest_index_by_downtrack().
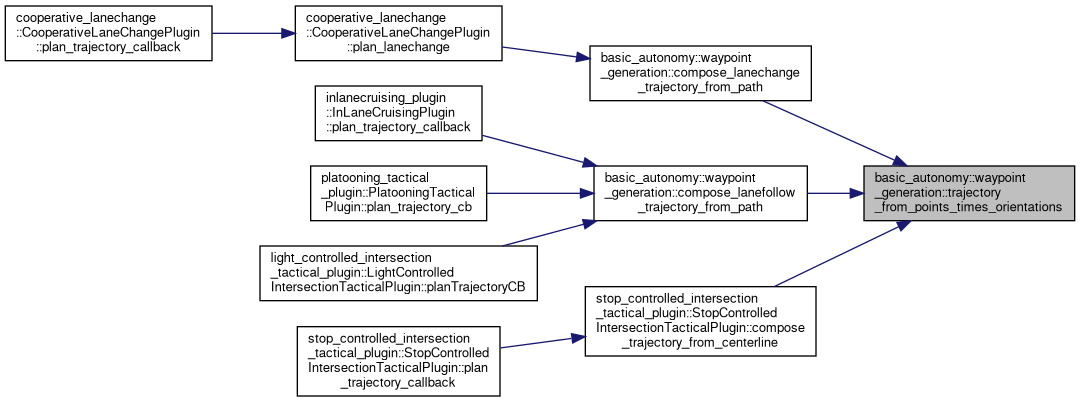
◆ trajectory_from_points_times_orientations()
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > basic_autonomy::waypoint_generation::trajectory_from_points_times_orientations | ( | const std::vector< lanelet::BasicPoint2d > & | points, |
| const std::vector< double > & | times, | ||
| const std::vector< double > & | yaws, | ||
| rclcpp::Time | startTime, | ||
| const std::string & | desired_controller_plugin | ||
| ) |
Method combines input points, times, orientations, and an absolute start time to form a valid carma platform trajectory.
NOTE: All input vectors must be the same size. The output vector will take this size.
- Parameters
-
points The points in the map frame that the trajectory will follow. Units m times The times which at the vehicle should arrive at the specified points. First point should have a value of 0. Units s yaws The orientation the vehicle should achieve at each point. Units radians startTime The absolute start time which will be used to update the input relative times. Units s desired_controller_plugin The name of the controller plugin for the generated trajectory.
- Returns
- A list of trajectory points built from the provided inputs.
Definition at line 728 of file basic_autonomy.cpp.
References process_bag::i.
Referenced by compose_lanechange_trajectory_from_path(), compose_lanefollow_trajectory_from_path(), and stop_controlled_intersection_tactical_plugin::StopControlledIntersectionTacticalPlugin::compose_trajectory_from_centerline().
Variable Documentation
◆ BASIC_AUTONOMY_LOGGER
|
static |
Definition at line 63 of file basic_autonomy.hpp.
Referenced by add_lanefollow_buffer(), apply_speed_limits(), build_chain_centerline(), compose_lanechange_trajectory_from_path(), compose_lanefollow_trajectory_from_path(), compute_fit(), constrain_to_time_boundary(), create_geometry_profile(), create_lanefollow_geometry(), extrapolate_to_length(), get_lanechange_points_from_maneuver(), get_nearest_index_by_downtrack(), get_nearest_point_index(), process_trajectory_plan(), and resample_linestring_pair_to_same_size().
◆ epsilon_
| const double basic_autonomy::waypoint_generation::epsilon_ = 0.0000001 |
Definition at line 24 of file helper_functions.hpp.
Referenced by add_lanefollow_buffer().