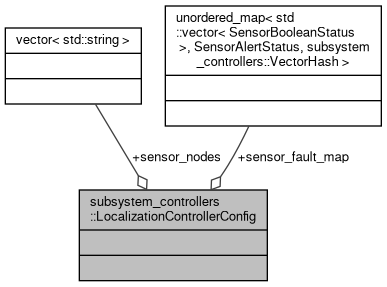
Stuct containing the algorithm configuration values for the BaseSubsystemController. More...
#include <localization_controller_config.hpp>
Public Attributes | |
| std::vector< std::string > | sensor_nodes |
| sensor_nodes More... | |
| std::unordered_map< std::vector< SensorBooleanStatus >, SensorAlertStatus, VectorHash > | sensor_fault_map |
Friends | |
| std::ostream & | operator<< (std::ostream &output, const LocalizationControllerConfig &c) |
Detailed Description
Stuct containing the algorithm configuration values for the BaseSubsystemController.
Definition at line 45 of file localization_controller_config.hpp.
Friends And Related Function Documentation
◆ operator<<
|
friend |
Definition at line 55 of file localization_controller_config.hpp.
Member Data Documentation
◆ sensor_fault_map
| std::unordered_map<std::vector<SensorBooleanStatus>, SensorAlertStatus, VectorHash> subsystem_controllers::LocalizationControllerConfig::sensor_fault_map |
Definition at line 51 of file localization_controller_config.hpp.
Referenced by subsystem_controllers::LocalizationControllerNode::LocalizationControllerNode(), subsystem_controllers::LocalizationControllerNode::handle_on_configure(), and subsystem_controllers::LocalizationControllerNode::on_system_alert().
◆ sensor_nodes
| std::vector<std::string> subsystem_controllers::LocalizationControllerConfig::sensor_nodes |
sensor_nodes
Definition at line 48 of file localization_controller_config.hpp.
Referenced by subsystem_controllers::LocalizationControllerNode::LocalizationControllerNode(), subsystem_controllers::LocalizationControllerNode::handle_on_configure(), and subsystem_controllers::LocalizationControllerNode::on_system_alert().
The documentation for this struct was generated from the following file:
- subsystem_controllers/include/subsystem_controllers/localization_controller/localization_controller_config.hpp