A base class for all subsystem_controllers which provides default lifecycle behavior for subsystems. More...
#include <base_subsystem_controller.hpp>
Public Member Functions | |
| BaseSubsystemController ()=delete | |
| BaseSubsystemController (const rclcpp::NodeOptions &options) | |
| Constructor. Set explicitly to support node composition. More... | |
| ~BaseSubsystemController ()=default | |
| void | set_config (BaseSubSystemControllerConfig config) |
| virtual void | on_system_alert (const carma_msgs::msg::SystemAlert::UniquePtr msg) |
| virtual carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &prev_state) |
| virtual carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &prev_state) |
| virtual carma_ros2_utils::CallbackReturn | handle_on_deactivate (const rclcpp_lifecycle::State &prev_state) |
| virtual carma_ros2_utils::CallbackReturn | handle_on_cleanup (const rclcpp_lifecycle::State &prev_state) |
| virtual carma_ros2_utils::CallbackReturn | handle_on_error (const rclcpp_lifecycle::State &prev_state, const std::string &exception_string) |
| virtual carma_ros2_utils::CallbackReturn | handle_on_shutdown (const rclcpp_lifecycle::State &prev_state) |
Protected Member Functions | |
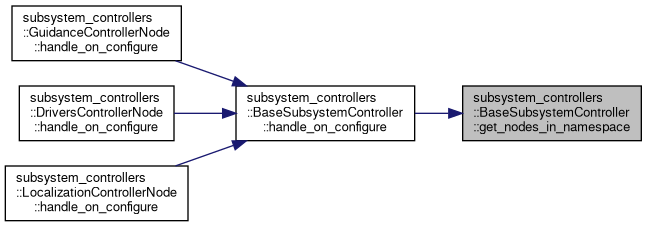
| std::vector< std::string > | get_nodes_in_namespace (const std::string &node_namespace) const |
| Returns the list of fully qualified node names for all ROS2 nodes in the provided namespace. More... | |
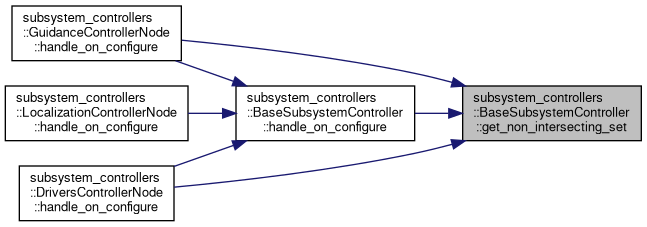
| std::vector< std::string > | get_non_intersecting_set (const std::vector< std::string > &set_a, const std::vector< std::string > &set_b) const |
| Returns all elements of the provided set_a which are NOT contained in the provided set_b. More... | |
Protected Attributes | |
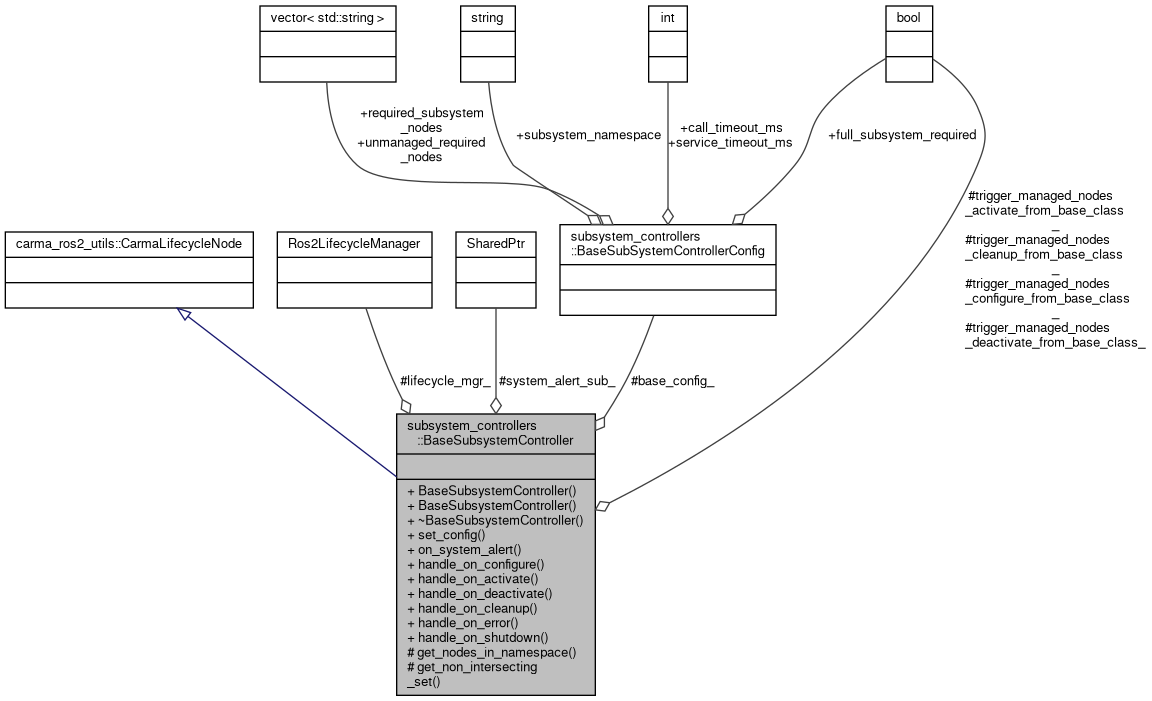
| ros2_lifecycle_manager::Ros2LifecycleManager | lifecycle_mgr_ |
| Lifecycle Manager which will track the managed nodes and call their lifecycle services on request. More... | |
| rclcpp::Subscription< carma_msgs::msg::SystemAlert >::SharedPtr | system_alert_sub_ |
| The subscriber for the system alert topic. More... | |
| BaseSubSystemControllerConfig | base_config_ |
| The configuration struct. More... | |
| bool | trigger_managed_nodes_configure_from_base_class_ = true |
| Collection of flags which, if true, will cause the base class to make lifecycle service calls to managed nodes. More... | |
| bool | trigger_managed_nodes_activate_from_base_class_ = true |
| bool | trigger_managed_nodes_deactivate_from_base_class_ = true |
| bool | trigger_managed_nodes_cleanup_from_base_class_ = true |
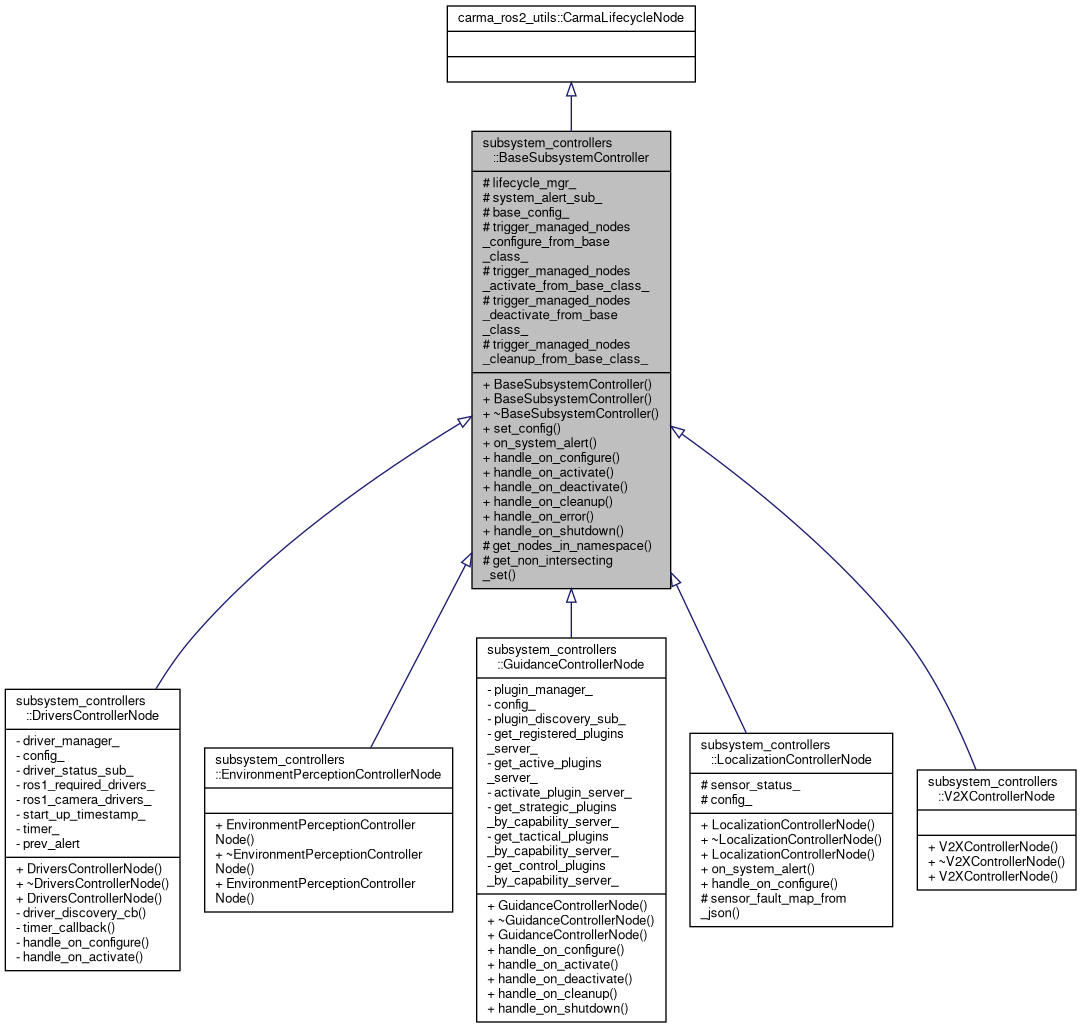
Detailed Description
A base class for all subsystem_controllers which provides default lifecycle behavior for subsystems.
The default behavior which is provided is as follows
- Takes in a list of required nodes and a namespace
- Manages the lifecycle of all nodes which are the union of the required nodes and the namespace
- Monitors the system_alert topic and if a node within its required node set crashes it notifies the larger system that the subsystem has failed
Definition at line 39 of file base_subsystem_controller.hpp.
Constructor & Destructor Documentation
◆ BaseSubsystemController() [1/2]
|
delete |
◆ BaseSubsystemController() [2/2]
|
explicit |
Constructor. Set explicitly to support node composition.
- Parameters
-
options The node options to use for configuring this node
Definition at line 27 of file base_subsystem_controller.cpp.
References base_config_, subsystem_controllers::BaseSubSystemControllerConfig::call_timeout_ms, subsystem_controllers::BaseSubSystemControllerConfig::full_subsystem_required, subsystem_controllers::BaseSubSystemControllerConfig::required_subsystem_nodes, subsystem_controllers::BaseSubSystemControllerConfig::service_timeout_ms, subsystem_controllers::BaseSubSystemControllerConfig::subsystem_namespace, and subsystem_controllers::BaseSubSystemControllerConfig::unmanaged_required_nodes.
◆ ~BaseSubsystemController()
|
default |
Member Function Documentation
◆ get_nodes_in_namespace()
|
protected |
Returns the list of fully qualified node names for all ROS2 nodes in the provided namespace.
- Parameters
-
node_namespace The ros namespace to get all nodes within. For example /guidance
- Returns
- The list of node names
Definition at line 279 of file base_subsystem_controller.cpp.
References process_traj_logs::split.
Referenced by handle_on_configure().
◆ get_non_intersecting_set()
|
protected |
Returns all elements of the provided set_a which are NOT contained in the provided set_b.
set_a The set of strings which will have its intersection checked against
set_b The set of strings which will NOT be in the returned set
- Returns
- A set of not intersecting strings which are in set_a but not set_b
Definition at line 356 of file base_subsystem_controller.cpp.
Referenced by subsystem_controllers::GuidanceControllerNode::handle_on_configure(), handle_on_configure(), and subsystem_controllers::DriversControllerNode::handle_on_configure().
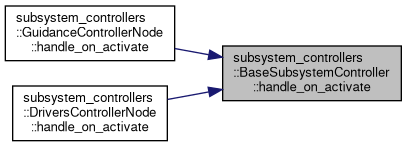
◆ handle_on_activate()
|
virtual |
Reimplemented in subsystem_controllers::GuidanceControllerNode, and subsystem_controllers::DriversControllerNode.
Definition at line 167 of file base_subsystem_controller.cpp.
References base_config_, subsystem_controllers::BaseSubSystemControllerConfig::call_timeout_ms, lifecycle_mgr_, subsystem_controllers::BaseSubSystemControllerConfig::service_timeout_ms, and trigger_managed_nodes_activate_from_base_class_.
Referenced by subsystem_controllers::GuidanceControllerNode::handle_on_activate(), and subsystem_controllers::DriversControllerNode::handle_on_activate().
◆ handle_on_cleanup()
|
virtual |
Reimplemented in subsystem_controllers::GuidanceControllerNode.
Definition at line 215 of file base_subsystem_controller.cpp.
References base_config_, subsystem_controllers::BaseSubSystemControllerConfig::call_timeout_ms, lifecycle_mgr_, subsystem_controllers::BaseSubSystemControllerConfig::service_timeout_ms, and trigger_managed_nodes_cleanup_from_base_class_.
Referenced by subsystem_controllers::GuidanceControllerNode::handle_on_cleanup().

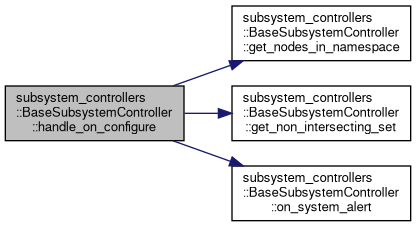
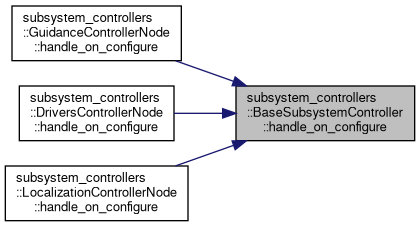
◆ handle_on_configure()
|
virtual |
Reimplemented in subsystem_controllers::GuidanceControllerNode, subsystem_controllers::DriversControllerNode, and subsystem_controllers::LocalizationControllerNode.
Definition at line 92 of file base_subsystem_controller.cpp.
References base_config_, subsystem_controllers::BaseSubSystemControllerConfig::call_timeout_ms, subsystem_controllers::BaseSubSystemControllerConfig::full_subsystem_required, get_nodes_in_namespace(), get_non_intersecting_set(), lifecycle_mgr_, on_system_alert(), subsystem_controllers::BaseSubSystemControllerConfig::required_subsystem_nodes, subsystem_controllers::BaseSubSystemControllerConfig::service_timeout_ms, subsystem_controllers::BaseSubSystemControllerConfig::subsystem_namespace, system_alert_sub_, trigger_managed_nodes_configure_from_base_class_, and subsystem_controllers::BaseSubSystemControllerConfig::unmanaged_required_nodes.
Referenced by subsystem_controllers::GuidanceControllerNode::handle_on_configure(), subsystem_controllers::DriversControllerNode::handle_on_configure(), and subsystem_controllers::LocalizationControllerNode::handle_on_configure().
◆ handle_on_deactivate()
|
virtual |
Reimplemented in subsystem_controllers::GuidanceControllerNode.
Definition at line 191 of file base_subsystem_controller.cpp.
References base_config_, subsystem_controllers::BaseSubSystemControllerConfig::call_timeout_ms, lifecycle_mgr_, subsystem_controllers::BaseSubSystemControllerConfig::service_timeout_ms, and trigger_managed_nodes_deactivate_from_base_class_.
Referenced by subsystem_controllers::GuidanceControllerNode::handle_on_deactivate().

◆ handle_on_error()
|
virtual |
Definition at line 239 of file base_subsystem_controller.cpp.
References base_config_, subsystem_controllers::BaseSubSystemControllerConfig::call_timeout_ms, lifecycle_mgr_, and subsystem_controllers::BaseSubSystemControllerConfig::service_timeout_ms.
◆ handle_on_shutdown()
|
virtual |
Reimplemented in subsystem_controllers::GuidanceControllerNode.
Definition at line 259 of file base_subsystem_controller.cpp.
References base_config_, subsystem_controllers::BaseSubSystemControllerConfig::call_timeout_ms, lifecycle_mgr_, and subsystem_controllers::BaseSubSystemControllerConfig::service_timeout_ms.
Referenced by subsystem_controllers::GuidanceControllerNode::handle_on_shutdown().

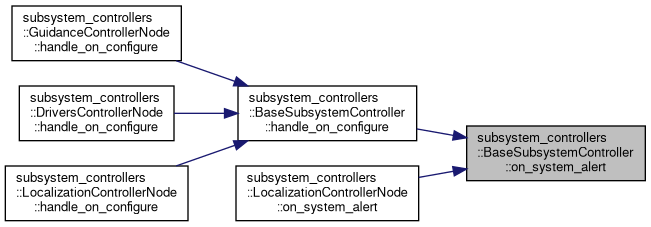
◆ on_system_alert()
|
virtual |
Reimplemented in subsystem_controllers::LocalizationControllerNode.
Definition at line 55 of file base_subsystem_controller.cpp.
References base_config_, subsystem_controllers::BaseSubSystemControllerConfig::required_subsystem_nodes, subsystem_controllers::BaseSubSystemControllerConfig::subsystem_namespace, and subsystem_controllers::BaseSubSystemControllerConfig::unmanaged_required_nodes.
Referenced by handle_on_configure(), and subsystem_controllers::LocalizationControllerNode::on_system_alert().
◆ set_config()
| void subsystem_controllers::BaseSubsystemController::set_config | ( | BaseSubSystemControllerConfig | config | ) |
Definition at line 50 of file base_subsystem_controller.cpp.
References base_config_.
Member Data Documentation
◆ base_config_
|
protected |
The configuration struct.
Definition at line 96 of file base_subsystem_controller.hpp.
Referenced by BaseSubsystemController(), handle_on_activate(), handle_on_cleanup(), subsystem_controllers::GuidanceControllerNode::handle_on_configure(), handle_on_configure(), subsystem_controllers::DriversControllerNode::handle_on_configure(), handle_on_deactivate(), handle_on_error(), handle_on_shutdown(), on_system_alert(), and set_config().
◆ lifecycle_mgr_
|
protected |
Lifecycle Manager which will track the managed nodes and call their lifecycle services on request.
Definition at line 90 of file base_subsystem_controller.hpp.
Referenced by handle_on_activate(), handle_on_cleanup(), subsystem_controllers::GuidanceControllerNode::handle_on_configure(), handle_on_configure(), subsystem_controllers::DriversControllerNode::handle_on_configure(), handle_on_deactivate(), handle_on_error(), and handle_on_shutdown().
◆ system_alert_sub_
|
protected |
The subscriber for the system alert topic.
Definition at line 93 of file base_subsystem_controller.hpp.
Referenced by handle_on_configure().
◆ trigger_managed_nodes_activate_from_base_class_
|
protected |
Definition at line 105 of file base_subsystem_controller.hpp.
Referenced by handle_on_activate().
◆ trigger_managed_nodes_cleanup_from_base_class_
|
protected |
Definition at line 107 of file base_subsystem_controller.hpp.
Referenced by handle_on_cleanup().
◆ trigger_managed_nodes_configure_from_base_class_
|
protected |
Collection of flags which, if true, will cause the base class to make lifecycle service calls to managed nodes.
Definition at line 104 of file base_subsystem_controller.hpp.
Referenced by subsystem_controllers::DriversControllerNode::DriversControllerNode(), subsystem_controllers::GuidanceControllerNode::GuidanceControllerNode(), subsystem_controllers::DriversControllerNode::handle_on_activate(), and handle_on_configure().
◆ trigger_managed_nodes_deactivate_from_base_class_
|
protected |
Definition at line 106 of file base_subsystem_controller.hpp.
Referenced by handle_on_deactivate().
The documentation for this class was generated from the following files:
- subsystem_controllers/include/subsystem_controllers/base_subsystem_controller/base_subsystem_controller.hpp
- subsystem_controllers/src/base_subsystem_controller/base_subsystem_controller.cpp