TrafficControl.hpp File Reference
#include <rclcpp/rclcpp.hpp>#include <boost/uuid/uuid.hpp>#include <boost/uuid/uuid_io.hpp>#include <boost/uuid/uuid_generators.hpp>#include <lanelet2_core/LaneletMap.h>#include <autoware_lanelet2_msgs/msg/map_bin.hpp>#include <lanelet2_io/io_handlers/Serialize.h>#include <lanelet2_core/primitives/Point.h>#include <lanelet2_extension/regulatory_elements/DigitalSpeedLimit.h>#include <lanelet2_extension/regulatory_elements/StopRule.h>#include <lanelet2_extension/regulatory_elements/CarmaTrafficSignal.h>#include <lanelet2_extension/regulatory_elements/PassingControlLine.h>#include <lanelet2_extension/regulatory_elements/DigitalMinimumGap.h>#include <carma_wm/SignalizedIntersectionManager.hpp>#include <lanelet2_core/primitives/LaneletOrArea.h>#include <boost/archive/binary_iarchive.hpp>#include <boost/archive/binary_oarchive.hpp>#include <autoware_lanelet2_ros2_interface/utility/query.hpp>#include <carma_ros2_utils/carma_lifecycle_node.hpp>
Include dependency graph for TrafficControl.hpp:

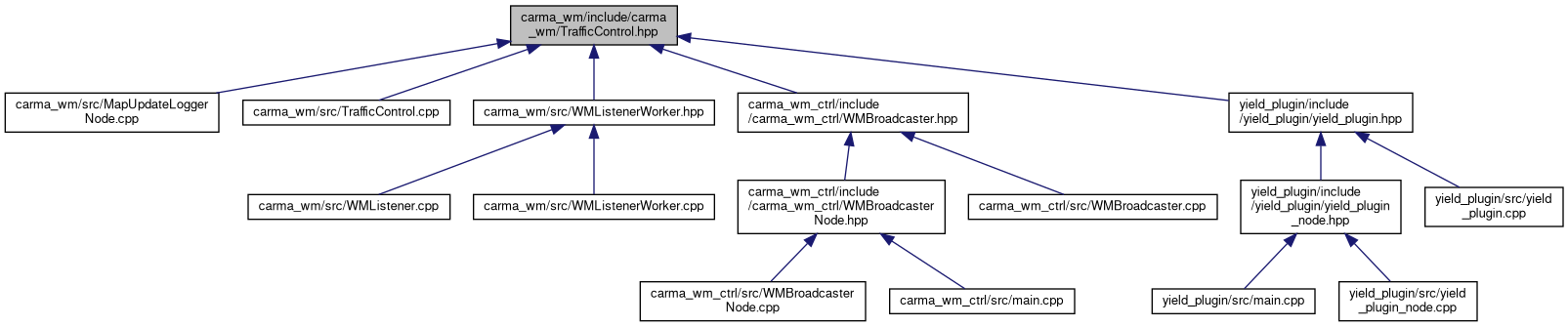
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | carma_wm::TrafficControl |
Namespaces | |
| namespace | carma_wm |
| namespace | boost |
| namespace | boost::serialization |
Functions | |
| void | carma_wm::toBinMsg (std::shared_ptr< carma_wm::TrafficControl > gf_ptr, autoware_lanelet2_msgs::msg::MapBin *msg) |
| void | carma_wm::fromBinMsg (const autoware_lanelet2_msgs::msg::MapBin &msg, std::shared_ptr< carma_wm::TrafficControl > gf_ptr, lanelet::LaneletMapPtr lanelet_map=nullptr) |
| template<class Archive > | |
| void | boost::serialization::save (Archive &ar, const carma_wm::TrafficControl &gf, unsigned int) |
| template<class Archive > | |
| void | boost::serialization::load (Archive &ar, carma_wm::TrafficControl &gf, unsigned int) |
| template<class Archive > | |
| void | boost::serialization::save (Archive &ar, const carma_wm::SignalizedIntersectionManager &sim, unsigned int) |
| template<class Archive > | |
| void | boost::serialization::load (Archive &ar, carma_wm::SignalizedIntersectionManager &sim, unsigned int) |
| template<typename Archive > | |
| void | boost::serialization::serialize (Archive &ar, std::pair< lanelet::Id, lanelet::RegulatoryElementPtr > &p, unsigned int) |
| template<typename Archive > | |
| void | boost::serialization::serialize (Archive &ar, std::pair< uint8_t, lanelet::Id > &p, unsigned int) |
| template<typename Archive > | |
| void | boost::serialization::serialize (Archive &ar, std::pair< uint16_t, lanelet::Id > &p, unsigned int) |
| template<typename Archive > | |
| void | boost::serialization::serialize (Archive &ar, std::pair< uint32_t, lanelet::Id > &p, unsigned int) |