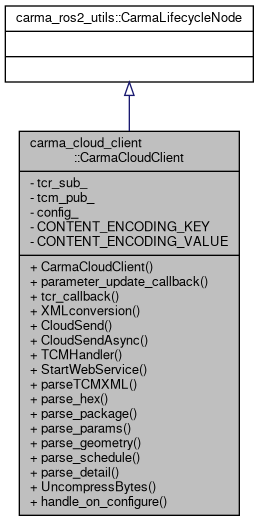
TODO for USER: Add class description. More...
#include <carma_cloud_client_node.hpp>
Public Member Functions | |
| CarmaCloudClient (const rclcpp::NodeOptions &) | |
| Node constructor. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| callback for dynamic parameter updates More... | |
| void | tcr_callback (carma_v2x_msgs::msg::TrafficControlRequest::UniquePtr msg) |
| TCR subscription callback. More... | |
| void | XMLconversion (char *xml_str, carma_v2x_msgs::msg::TrafficControlRequest request_msg) |
| Funtion to Convert the TCR into XML format. More... | |
| int | CloudSend (const std::string &local_msg, const std::string &local_url, const std::string &local_base, const std::string &local_method) |
| Send http request to carma cloud. More... | |
| void | CloudSendAsync (const std::string &local_msg, const std::string &local_url, const std::string &local_base, const std::string &local_method) |
| Send async http request to carma cloud. More... | |
| void | TCMHandler (QHttpEngine::Socket *socket) |
| Handles the TCM received from CARMA Cloud. More... | |
| int | StartWebService () |
| Starts web service. More... | |
| j2735_v2x_msgs::msg::TrafficControlMessage | parseTCMXML (boost::property_tree::ptree &tree) |
| Parse xml package of tcm msg using boost property tree xml parser. More... | |
| unsigned char | parse_hex (char c) |
| Convert Hex char to unsigned char. More... | |
| j2735_v2x_msgs::msg::TrafficControlPackage | parse_package (boost::property_tree::ptree &tree) |
| Parse xml package subtree of tcm msg. More... | |
| j2735_v2x_msgs::msg::TrafficControlParams | parse_params (boost::property_tree::ptree &tree) |
| Parse xml params subtree of tcm msg. More... | |
| j2735_v2x_msgs::msg::TrafficControlGeometry | parse_geometry (boost::property_tree::ptree &tree) |
| Parse xml geometry subtree of tcm msg. More... | |
| j2735_v2x_msgs::msg::TrafficControlSchedule | parse_schedule (boost::property_tree::ptree &tree) |
| Parse xml schedule subtree of tcm msg. More... | |
| j2735_v2x_msgs::msg::TrafficControlDetail | parse_detail (boost::property_tree::ptree &tree) |
| Parse xml detail subtree of tcm msg. More... | |
| QByteArray | UncompressBytes (const QByteArray compressedBytes) const |
| Uncompress bytes using zlib library. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &prev_state) |
Private Attributes | |
| carma_ros2_utils::SubPtr< carma_v2x_msgs::msg::TrafficControlRequest > | tcr_sub_ |
| carma_ros2_utils::PubPtr< j2735_v2x_msgs::msg::TrafficControlMessage > | tcm_pub_ |
| Config | config_ |
| const char * | CONTENT_ENCODING_KEY = "Content-Encoding" |
| const char * | CONTENT_ENCODING_VALUE = "gzip" |
Detailed Description
TODO for USER: Add class description.
Definition at line 64 of file carma_cloud_client_node.hpp.
Constructor & Destructor Documentation
◆ CarmaCloudClient()
|
explicit |
Node constructor.
Definition at line 22 of file carma_cloud_client_node.cpp.
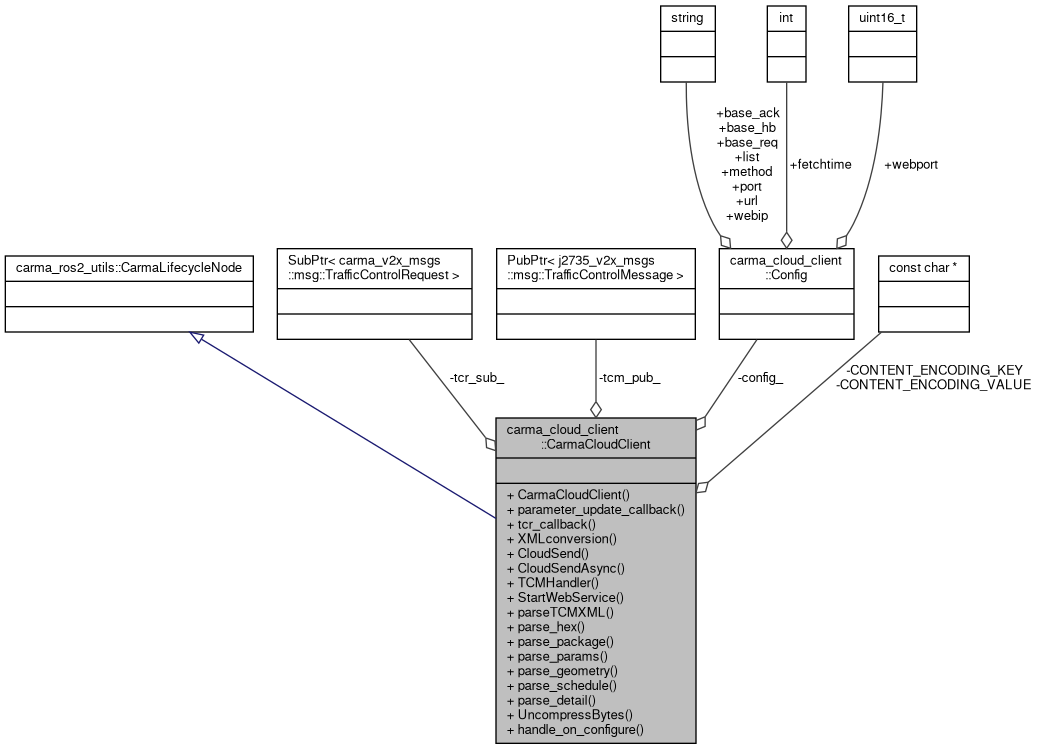
References carma_cloud_client::Config::base_ack, carma_cloud_client::Config::base_req, config_, carma_cloud_client::Config::fetchtime, carma_cloud_client::Config::list, carma_cloud_client::Config::method, carma_cloud_client::Config::port, carma_cloud_client::Config::url, carma_cloud_client::Config::webip, and carma_cloud_client::Config::webport.
Member Function Documentation
◆ CloudSend()
| int carma_cloud_client::CarmaCloudClient::CloudSend | ( | const std::string & | local_msg, |
| const std::string & | local_url, | ||
| const std::string & | local_base, | ||
| const std::string & | local_method | ||
| ) |
Send http request to carma cloud.
- Parameters
-
local_msg msg to be sent to cloud local_url url to cloud local_base base to be added to url local_method method
Definition at line 161 of file carma_cloud_client_node.cpp.
References config_, and carma_cloud_client::Config::port.
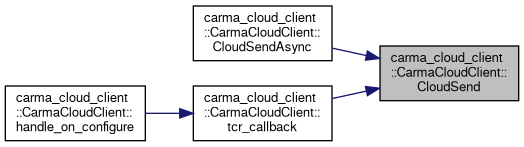
Referenced by CloudSendAsync(), and tcr_callback().
◆ CloudSendAsync()
| void carma_cloud_client::CarmaCloudClient::CloudSendAsync | ( | const std::string & | local_msg, |
| const std::string & | local_url, | ||
| const std::string & | local_base, | ||
| const std::string & | local_method | ||
| ) |
Send async http request to carma cloud.
- Parameters
-
local_msg msg to be sent to cloud local_url url to cloud local_base base to be added to url local_method method
Definition at line 188 of file carma_cloud_client_node.cpp.
References CloudSend().

◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn carma_cloud_client::CarmaCloudClient::handle_on_configure | ( | const rclcpp_lifecycle::State & | prev_state | ) |
Definition at line 58 of file carma_cloud_client_node.cpp.
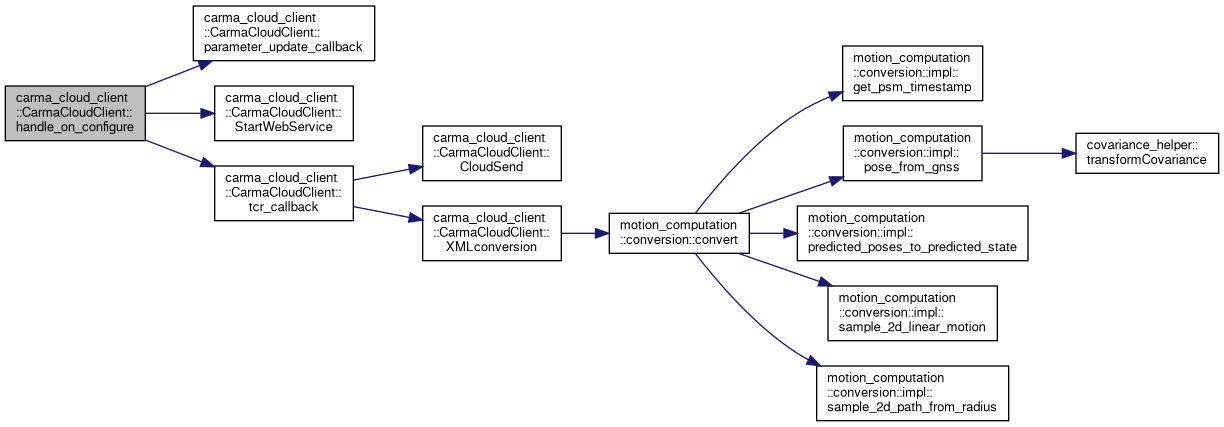
References carma_cloud_client::Config::base_ack, carma_cloud_client::Config::base_req, config_, carma_cloud_client::Config::fetchtime, carma_cloud_client::Config::list, carma_cloud_client::Config::method, parameter_update_callback(), carma_cloud_client::Config::port, StartWebService(), tcm_pub_, tcr_callback(), tcr_sub_, carma_cloud_client::Config::url, carma_cloud_client::Config::webip, and carma_cloud_client::Config::webport.
◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult carma_cloud_client::CarmaCloudClient::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
callback for dynamic parameter updates
- Parameters
-
parameters list of parameters
Definition at line 41 of file carma_cloud_client_node.cpp.
References carma_cloud_client::Config::base_ack, carma_cloud_client::Config::base_req, config_, carma_cloud_client::Config::list, carma_cloud_client::Config::method, carma_cloud_client::Config::port, and carma_cloud_client::Config::url.
Referenced by handle_on_configure().

◆ parse_detail()
| j2735_v2x_msgs::msg::TrafficControlDetail carma_cloud_client::CarmaCloudClient::parse_detail | ( | boost::property_tree::ptree & | tree | ) |
Parse xml detail subtree of tcm msg.
- Parameters
-
tree xml detail boost ptree subtree
- Returns
- TrafficControlDetail
Definition at line 491 of file carma_cloud_client_node.cpp.
References osm_transform::tree.
Referenced by parse_params().

◆ parse_geometry()
| j2735_v2x_msgs::msg::TrafficControlGeometry carma_cloud_client::CarmaCloudClient::parse_geometry | ( | boost::property_tree::ptree & | tree | ) |
Parse xml geometry subtree of tcm msg.
- Parameters
-
tree xml geometry boost ptree subtree
- Returns
- TrafficControlGeometry
Definition at line 752 of file carma_cloud_client_node.cpp.
References osm_transform::tree.
Referenced by parseTCMXML().

◆ parse_hex()
| unsigned char carma_cloud_client::CarmaCloudClient::parse_hex | ( | char | c | ) |
Convert Hex char to unsigned char.
- Parameters
-
c char in hex format
Definition at line 803 of file carma_cloud_client_node.cpp.
References process_traj_logs::c.
Referenced by parseTCMXML().

◆ parse_package()
| j2735_v2x_msgs::msg::TrafficControlPackage carma_cloud_client::CarmaCloudClient::parse_package | ( | boost::property_tree::ptree & | tree | ) |
Parse xml package subtree of tcm msg.
- Parameters
-
tree xml package boost ptree subtree
- Returns
- TrafficControlPackage
Definition at line 396 of file carma_cloud_client_node.cpp.
References osm_transform::tree.
Referenced by parseTCMXML().

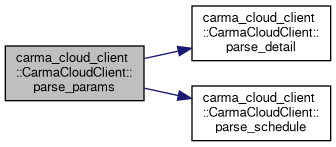
◆ parse_params()
| j2735_v2x_msgs::msg::TrafficControlParams carma_cloud_client::CarmaCloudClient::parse_params | ( | boost::property_tree::ptree & | tree | ) |
Parse xml params subtree of tcm msg.
- Parameters
-
tree xml params boost ptree subtree
- Returns
- TrafficControlParams
Definition at line 656 of file carma_cloud_client_node.cpp.
References parse_detail(), parse_schedule(), and osm_transform::tree.
Referenced by parseTCMXML().

◆ parse_schedule()
| j2735_v2x_msgs::msg::TrafficControlSchedule carma_cloud_client::CarmaCloudClient::parse_schedule | ( | boost::property_tree::ptree & | tree | ) |
Parse xml schedule subtree of tcm msg.
- Parameters
-
tree xml schedule boost ptree subtree
- Returns
- TrafficControlSchedule
Definition at line 417 of file carma_cloud_client_node.cpp.
References process_bag::i, and osm_transform::tree.
Referenced by parse_params().

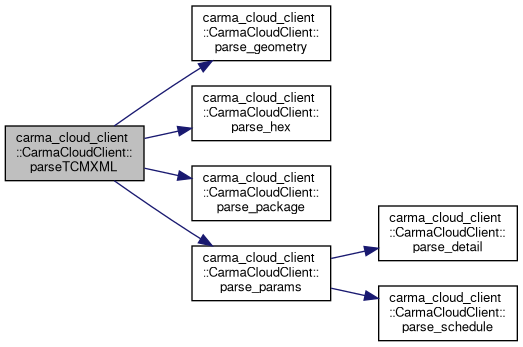
◆ parseTCMXML()
| j2735_v2x_msgs::msg::TrafficControlMessage carma_cloud_client::CarmaCloudClient::parseTCMXML | ( | boost::property_tree::ptree & | tree | ) |
Parse xml package of tcm msg using boost property tree xml parser.
- Parameters
-
tree xml boost ptree subtree
- Returns
- TrafficControlMessage
Definition at line 293 of file carma_cloud_client_node.cpp.
References process_bag::i, parse_geometry(), parse_hex(), parse_package(), parse_params(), and osm_transform::tree.
Referenced by TCMHandler().

◆ StartWebService()
| int carma_cloud_client::CarmaCloudClient::StartWebService | ( | ) |
Starts web service.
Definition at line 362 of file carma_cloud_client_node.cpp.
References config_, carma_cloud_client::Config::webip, and carma_cloud_client::Config::webport.
Referenced by handle_on_configure().

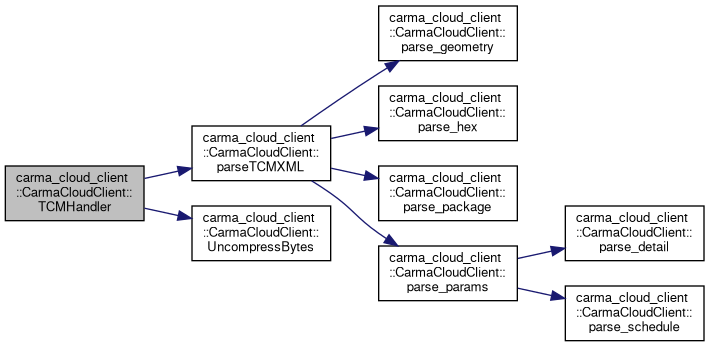
◆ TCMHandler()
| void carma_cloud_client::CarmaCloudClient::TCMHandler | ( | QHttpEngine::Socket * | socket | ) |
Handles the TCM received from CARMA Cloud.
- Parameters
-
socket http socket
Definition at line 232 of file carma_cloud_client_node.cpp.
References CONTENT_ENCODING_KEY, CONTENT_ENCODING_VALUE, parseTCMXML(), tcm_pub_, and UncompressBytes().
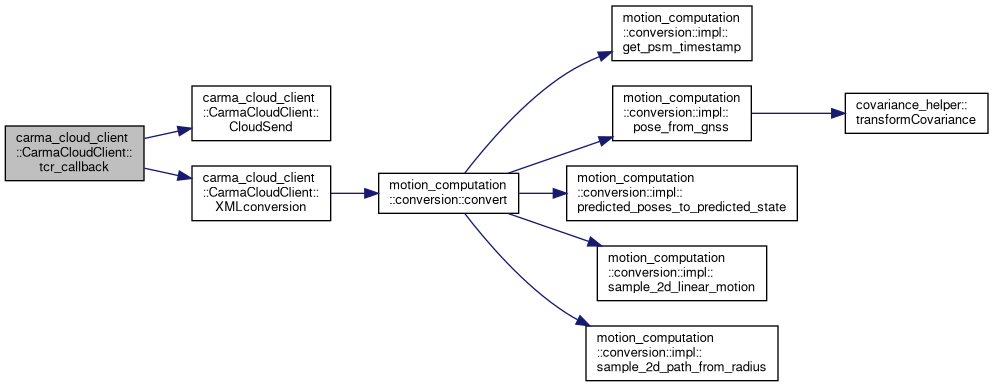
◆ tcr_callback()
| void carma_cloud_client::CarmaCloudClient::tcr_callback | ( | carma_v2x_msgs::msg::TrafficControlRequest::UniquePtr | msg | ) |
TCR subscription callback.
- Parameters
-
msg Traffic Control Request pointer
Definition at line 86 of file carma_cloud_client_node.cpp.
References carma_cloud_client::Config::base_req, CloudSend(), config_, carma_cloud_client::Config::method, carma_cloud_client::Config::url, and XMLconversion().
Referenced by handle_on_configure().

◆ UncompressBytes()
| QByteArray carma_cloud_client::CarmaCloudClient::UncompressBytes | ( | const QByteArray | compressedBytes | ) | const |
Uncompress bytes using zlib library.
- Parameters
-
compressedBytes compressed bytes
- Returns
- Uncompressed bytes
Definition at line 196 of file carma_cloud_client_node.cpp.
Referenced by TCMHandler().

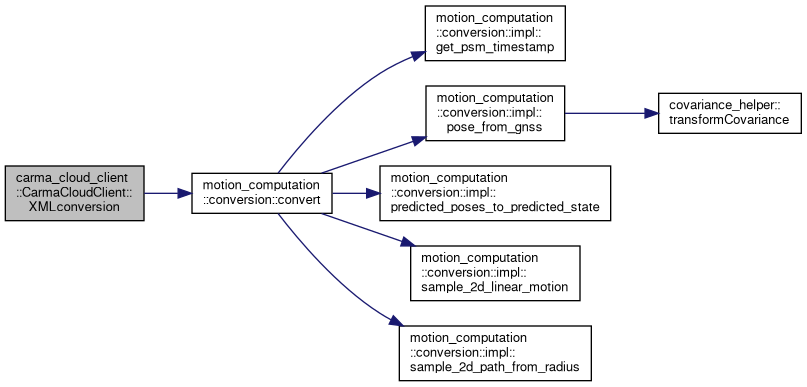
◆ XMLconversion()
| void carma_cloud_client::CarmaCloudClient::XMLconversion | ( | char * | xml_str, |
| carma_v2x_msgs::msg::TrafficControlRequest | request_msg | ||
| ) |
Funtion to Convert the TCR into XML format.
- Parameters
-
xml_str array of characters for xml format request_msg input TCR msg
Definition at line 99 of file carma_cloud_client_node.cpp.
References config_, motion_computation::conversion::convert(), carma_cloud_client::Config::fetchtime, process_bag::i, osm_transform::lat, carma_cloud_client::Config::list, carma_cooperative_perception::to_string(), carma_cloud_client::Config::webport, and osm_transform::x.
Referenced by tcr_callback().

Member Data Documentation
◆ config_
|
private |
Definition at line 73 of file carma_cloud_client_node.hpp.
Referenced by CarmaCloudClient(), CloudSend(), handle_on_configure(), parameter_update_callback(), StartWebService(), tcr_callback(), and XMLconversion().
◆ CONTENT_ENCODING_KEY
|
private |
Definition at line 75 of file carma_cloud_client_node.hpp.
Referenced by TCMHandler().
◆ CONTENT_ENCODING_VALUE
|
private |
Definition at line 76 of file carma_cloud_client_node.hpp.
Referenced by TCMHandler().
◆ tcm_pub_
|
private |
Definition at line 70 of file carma_cloud_client_node.hpp.
Referenced by handle_on_configure(), and TCMHandler().
◆ tcr_sub_
|
private |
Definition at line 69 of file carma_cloud_client_node.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- carma_cloud_client/include/carma_cloud_client/carma_cloud_client_node.hpp
- carma_cloud_client/src/carma_cloud_client_node.cpp