Node which provies exposes map publication and carma_wm update logic. More...
#include <WMBroadcasterNode.hpp>

Public Member Functions | |
| WMBroadcasterNode (const rclcpp::NodeOptions &options) | |
| Constructor. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) |
| void | publishMap (const autoware_lanelet2_msgs::msg::MapBin &map_msg) |
| Callback to publish a map. More... | |
| void | initializeWorker (std::weak_ptr< carma_ros2_utils::CarmaLifecycleNode > weak_node_pointer) |
| Initializes the WMBroadcaster worker with reference to the CarmaLifecycleNode itself. More... | |
| void | publishCtrlReq (const carma_v2x_msgs::msg::TrafficControlRequest &ctrlreq_msg) const |
| Callback to publish TrafficControlRequest Messages. More... | |
| void | publishMapUpdate (const autoware_lanelet2_msgs::msg::MapBin &geofence_msg) const |
| Callback to publish map updates (geofences) More... | |
| void | publishActiveGeofence (const carma_perception_msgs::msg::CheckActiveGeofence &active_geof_msg) |
| Callback to publish active geofence information. More... | |
| void | publishTCMACK (const carma_v2x_msgs::msg::MobilityOperation &mom_msg) |
| Callback to publish traffic control acknowledgement information. More... | |
Private Member Functions | |
| bool | spin_callback () |
| Spin callback, which will be called frequently based on the configured spin rate. More... | |
Private Attributes | |
| Config | config_ |
| carma_ros2_utils::PubPtr< autoware_lanelet2_msgs::msg::MapBin > | map_pub_ |
| carma_ros2_utils::PubPtr< autoware_lanelet2_msgs::msg::MapBin > | map_update_pub_ |
| carma_ros2_utils::PubPtr< carma_v2x_msgs::msg::TrafficControlRequest > | control_msg_pub_ |
| carma_ros2_utils::PubPtr< visualization_msgs::msg::MarkerArray > | tcm_visualizer_pub_ |
| carma_ros2_utils::PubPtr< visualization_msgs::msg::MarkerArray > | j2735_map_msg_visualizer_pub_ |
| carma_ros2_utils::PubPtr< carma_v2x_msgs::msg::TrafficControlRequestPolygon > | tcr_visualizer_pub_ |
| carma_ros2_utils::PubPtr< std_msgs::msg::Int32MultiArray > | upcoming_intersection_ids_pub_ |
| carma_ros2_utils::PubPtr< carma_perception_msgs::msg::CheckActiveGeofence > | active_pub_ |
| carma_ros2_utils::PubPtr< carma_v2x_msgs::msg::MobilityOperation > | tcm_ack_pub_ |
| carma_ros2_utils::SubPtr< autoware_lanelet2_msgs::msg::MapBin > | base_map_sub_ |
| carma_ros2_utils::SubPtr< carma_planning_msgs::msg::Route > | route_callmsg_sub_ |
| carma_ros2_utils::SubPtr< std_msgs::msg::String > | georef_sub_ |
| carma_ros2_utils::SubPtr< carma_v2x_msgs::msg::TrafficControlMessage > | geofence_sub_ |
| carma_ros2_utils::SubPtr< carma_v2x_msgs::msg::MapData > | incoming_map_sub_ |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::PoseStamped > | curr_location_sub_ |
| rclcpp::TimerBase::SharedPtr | timer_ |
| std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | ptr_ |
| std::unique_ptr< carma_wm_ctrl::WMBroadcaster > | wmb_ |
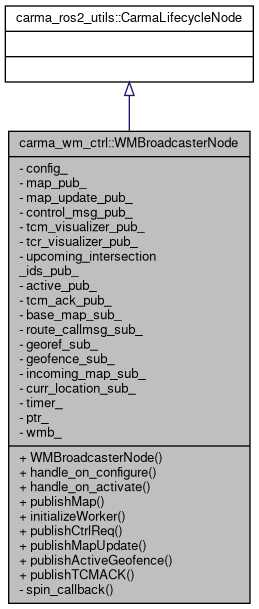
Detailed Description
Node which provies exposes map publication and carma_wm update logic.
The WMBroadcasterNode handles updating the lanelet2 base map and publishing the new versions to the rest of the CARMA Platform ROS network. The broadcaster also provides functions for adding or removing geofences from the map and notifying the rest of the system.
Definition at line 45 of file WMBroadcasterNode.hpp.
Constructor & Destructor Documentation
◆ WMBroadcasterNode()
|
explicit |
Constructor.
Definition at line 52 of file WMBroadcasterNode.cpp.
References carma_wm_ctrl::Config::ack_pub_times, config_, carma_wm_ctrl::Config::config_limit, carma_wm_ctrl::Config::intersection_coord_correction, carma_wm_ctrl::Config::intersection_ids_for_correction, carma_wm_ctrl::Config::max_lane_width, carma_wm_ctrl::Config::participant, carma_wm_ctrl::Config::tcr_bbox_expansion_meters, carma_wm_ctrl::Config::tim_icon_path, carma_wm_ctrl::Config::tim_icon_scale, carma_wm_ctrl::Config::traffic_control_request_period, and carma_wm_ctrl::Config::vehicle_id.
Member Function Documentation
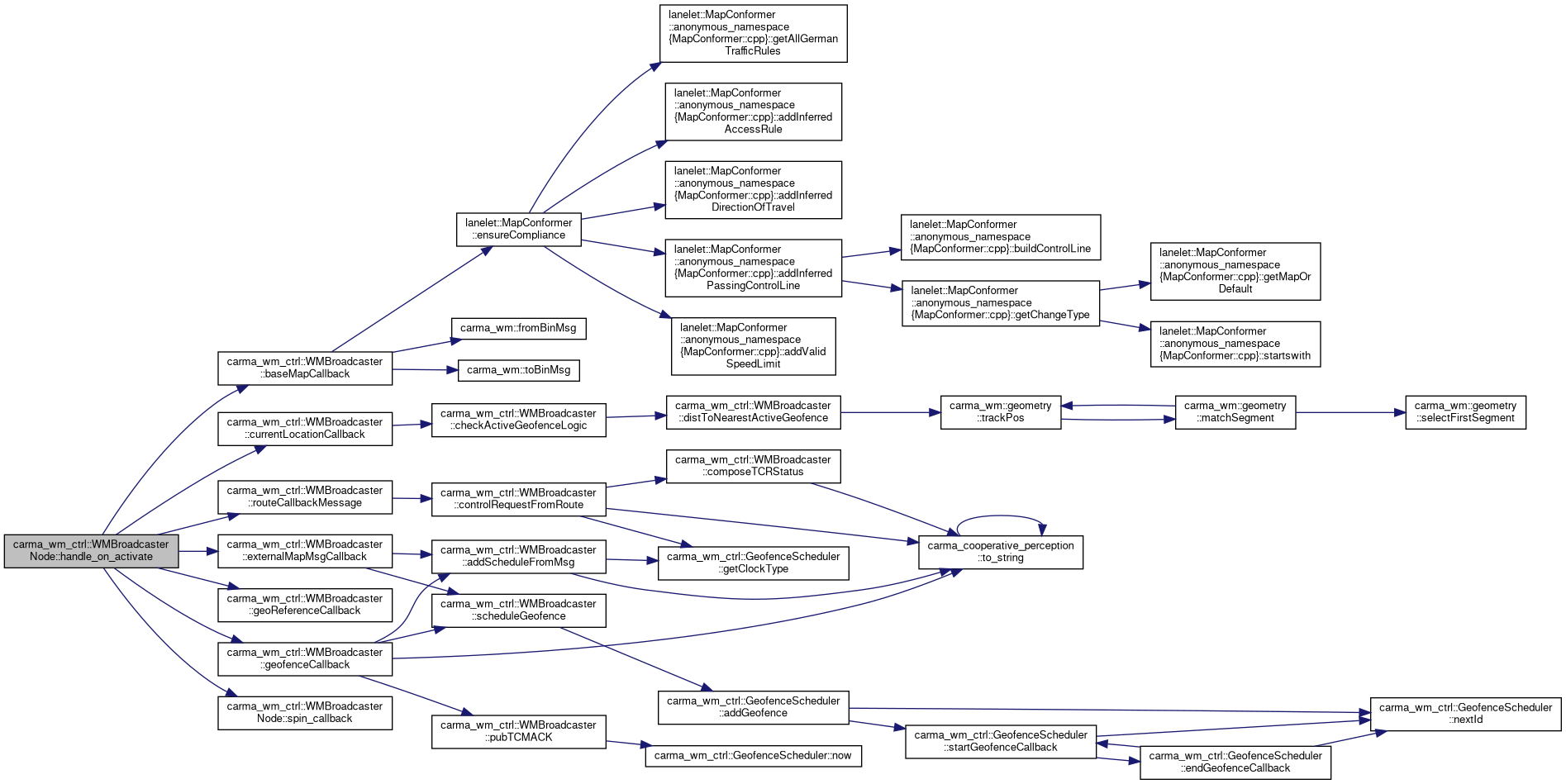
◆ handle_on_activate()
| carma_ros2_utils::CallbackReturn carma_wm_ctrl::WMBroadcasterNode::handle_on_activate | ( | const rclcpp_lifecycle::State & | prev_state | ) |
Definition at line 165 of file WMBroadcasterNode.cpp.
References base_map_sub_, carma_wm_ctrl::WMBroadcaster::baseMapCallback(), config_, curr_location_sub_, carma_wm_ctrl::WMBroadcaster::currentLocationCallback(), carma_wm_ctrl::WMBroadcaster::externalMapMsgCallback(), geofence_sub_, carma_wm_ctrl::WMBroadcaster::geofenceCallback(), georef_sub_, carma_wm_ctrl::WMBroadcaster::geoReferenceCallback(), incoming_map_sub_, route_callmsg_sub_, carma_wm_ctrl::WMBroadcaster::routeCallbackMessage(), spin_callback(), timer_, carma_wm_ctrl::Config::traffic_control_request_period, and wmb_.
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn carma_wm_ctrl::WMBroadcasterNode::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 80 of file WMBroadcasterNode.cpp.
References carma_wm_ctrl::Config::ack_pub_times, active_pub_, config_, carma_wm_ctrl::Config::config_limit, control_msg_pub_, initializeWorker(), carma_wm_ctrl::Config::intersection_coord_correction, carma_wm_ctrl::Config::intersection_ids_for_correction, j2735_map_msg_visualizer_pub_, map_pub_, map_update_pub_, carma_wm_ctrl::Config::max_lane_width, carma_wm_ctrl::Config::participant, tcm_ack_pub_, tcm_visualizer_pub_, carma_wm_ctrl::Config::tcr_bbox_expansion_meters, tcr_visualizer_pub_, carma_wm_ctrl::Config::tim_icon_path, carma_wm_ctrl::Config::tim_icon_scale, carma_wm_ctrl::Config::traffic_control_request_period, upcoming_intersection_ids_pub_, carma_wm_ctrl::Config::vehicle_id, and wmb_.
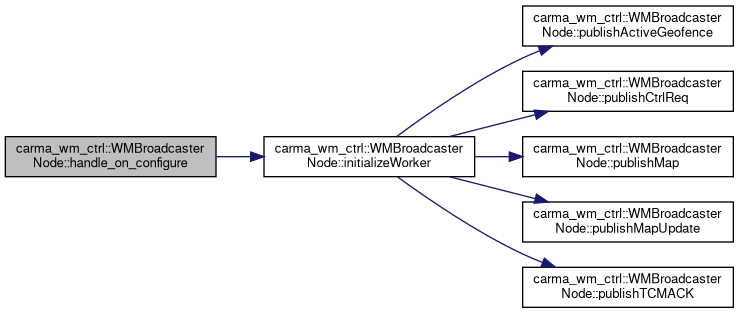
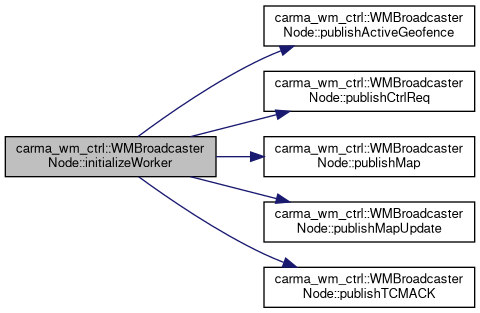
◆ initializeWorker()
| void carma_wm_ctrl::WMBroadcasterNode::initializeWorker | ( | std::weak_ptr< carma_ros2_utils::CarmaLifecycleNode > | weak_node_pointer | ) |
Initializes the WMBroadcaster worker with reference to the CarmaLifecycleNode itself.
- Parameters
-
weak_ptr to the node of type CarmaLifecycleNode that owns this worker
Definition at line 72 of file WMBroadcasterNode.cpp.
References publishActiveGeofence(), publishCtrlReq(), publishMap(), publishMapUpdate(), publishTCMACK(), and wmb_.
Referenced by handle_on_configure().

◆ publishActiveGeofence()
| void carma_wm_ctrl::WMBroadcasterNode::publishActiveGeofence | ( | const carma_perception_msgs::msg::CheckActiveGeofence & | active_geof_msg | ) |
Callback to publish active geofence information.
- Parameters
-
active_geof_msg The geofence information to publish
Definition at line 42 of file WMBroadcasterNode.cpp.
References active_pub_.
Referenced by initializeWorker().

◆ publishCtrlReq()
| void carma_wm_ctrl::WMBroadcasterNode::publishCtrlReq | ( | const carma_v2x_msgs::msg::TrafficControlRequest & | ctrlreq_msg | ) | const |
Callback to publish TrafficControlRequest Messages.
- Parameters
-
route_msg The TrafficControlRequest message to publish
Definition at line 37 of file WMBroadcasterNode.cpp.
References control_msg_pub_.
Referenced by initializeWorker().

◆ publishMap()
| void carma_wm_ctrl::WMBroadcasterNode::publishMap | ( | const autoware_lanelet2_msgs::msg::MapBin & | map_msg | ) |
Callback to publish a map.
- Parameters
-
map_msg The map message to publish
Definition at line 27 of file WMBroadcasterNode.cpp.
References map_pub_.
Referenced by initializeWorker().

◆ publishMapUpdate()
| void carma_wm_ctrl::WMBroadcasterNode::publishMapUpdate | ( | const autoware_lanelet2_msgs::msg::MapBin & | geofence_msg | ) | const |
Callback to publish map updates (geofences)
- Parameters
-
geofence_msg The geofence message to publish
Definition at line 32 of file WMBroadcasterNode.cpp.
References map_update_pub_.
Referenced by initializeWorker().

◆ publishTCMACK()
| void carma_wm_ctrl::WMBroadcasterNode::publishTCMACK | ( | const carma_v2x_msgs::msg::MobilityOperation & | mom_msg | ) |
Callback to publish traffic control acknowledgement information.
- Parameters
-
mom_msg The acknowledgement information to publish
Definition at line 47 of file WMBroadcasterNode.cpp.
References tcm_ack_pub_.
Referenced by initializeWorker().

◆ spin_callback()
|
private |
Spin callback, which will be called frequently based on the configured spin rate.
Definition at line 203 of file WMBroadcasterNode.cpp.
References j2735_map_msg_visualizer_pub_, tcm_visualizer_pub_, tcr_visualizer_pub_, upcoming_intersection_ids_pub_, and wmb_.
Referenced by handle_on_activate().

Member Data Documentation
◆ active_pub_
|
private |
Definition at line 118 of file WMBroadcasterNode.hpp.
Referenced by handle_on_configure(), and publishActiveGeofence().
◆ base_map_sub_
|
private |
Definition at line 121 of file WMBroadcasterNode.hpp.
Referenced by handle_on_activate().
◆ config_
|
private |
Definition at line 109 of file WMBroadcasterNode.hpp.
Referenced by WMBroadcasterNode(), handle_on_activate(), and handle_on_configure().
◆ control_msg_pub_
|
private |
Definition at line 113 of file WMBroadcasterNode.hpp.
Referenced by handle_on_configure(), and publishCtrlReq().
◆ curr_location_sub_
|
private |
Definition at line 126 of file WMBroadcasterNode.hpp.
Referenced by handle_on_activate().
◆ geofence_sub_
|
private |
Definition at line 124 of file WMBroadcasterNode.hpp.
Referenced by handle_on_activate().
◆ georef_sub_
|
private |
Definition at line 123 of file WMBroadcasterNode.hpp.
Referenced by handle_on_activate().
◆ incoming_map_sub_
|
private |
Definition at line 125 of file WMBroadcasterNode.hpp.
Referenced by handle_on_activate().
◆ j2735_map_msg_visualizer_pub_
|
private |
Definition at line 115 of file WMBroadcasterNode.hpp.
Referenced by handle_on_configure(), and spin_callback().
◆ map_pub_
|
private |
Definition at line 111 of file WMBroadcasterNode.hpp.
Referenced by handle_on_configure(), and publishMap().
◆ map_update_pub_
|
private |
Definition at line 112 of file WMBroadcasterNode.hpp.
Referenced by handle_on_configure(), and publishMapUpdate().
◆ ptr_
|
private |
Definition at line 131 of file WMBroadcasterNode.hpp.
◆ route_callmsg_sub_
|
private |
Definition at line 122 of file WMBroadcasterNode.hpp.
Referenced by handle_on_activate().
◆ tcm_ack_pub_
|
private |
Definition at line 119 of file WMBroadcasterNode.hpp.
Referenced by handle_on_configure(), and publishTCMACK().
◆ tcm_visualizer_pub_
|
private |
Definition at line 114 of file WMBroadcasterNode.hpp.
Referenced by handle_on_configure(), and spin_callback().
◆ tcr_visualizer_pub_
|
private |
Definition at line 116 of file WMBroadcasterNode.hpp.
Referenced by handle_on_configure(), and spin_callback().
◆ timer_
|
private |
Definition at line 129 of file WMBroadcasterNode.hpp.
Referenced by handle_on_activate().
◆ upcoming_intersection_ids_pub_
|
private |
Definition at line 117 of file WMBroadcasterNode.hpp.
Referenced by handle_on_configure(), and spin_callback().
◆ wmb_
|
private |
Definition at line 132 of file WMBroadcasterNode.hpp.
Referenced by handle_on_activate(), handle_on_configure(), initializeWorker(), and spin_callback().
The documentation for this class was generated from the following files:
- carma_wm_ctrl/include/carma_wm_ctrl/WMBroadcasterNode.hpp
- carma_wm_ctrl/src/WMBroadcasterNode.cpp