Class which provies exposes map publication and carma_wm update logic. More...
#include <WMBroadcaster.hpp>

Public Types | |
| using | PublishMapCallback = std::function< void(const autoware_lanelet2_msgs::msg::MapBin &)> |
| using | PublishMapUpdateCallback = std::function< void(const autoware_lanelet2_msgs::msg::MapBin &)> |
| using | PublishCtrlRequestCallback = std::function< void(const carma_v2x_msgs::msg::TrafficControlRequest &)> |
| using | PublishActiveGeofCallback = std::function< void(const carma_perception_msgs::msg::CheckActiveGeofence &)> |
| using | PublishMobilityOperationCallback = std::function< void(const carma_v2x_msgs::msg::MobilityOperation &)> |
Public Member Functions | |
| WMBroadcaster (const PublishMapCallback &map_pub, const PublishMapUpdateCallback &map_update_pub, const PublishCtrlRequestCallback &control_msg_pub, const PublishActiveGeofCallback &active_pub, std::shared_ptr< carma_ros2_utils::timers::TimerFactory > timer_factory, const PublishMobilityOperationCallback &tcm_ack_pub) | |
| Constructor. More... | |
| void | baseMapCallback (autoware_lanelet2_msgs::msg::MapBin::UniquePtr map_msg) |
| Callback to set the base map when it has been loaded. More... | |
| void | geoReferenceCallback (std_msgs::msg::String::UniquePtr geo_ref) |
| Callback to set the base map georeference (proj string) More... | |
| void | geofenceCallback (carma_v2x_msgs::msg::TrafficControlMessage::UniquePtr geofence_msg) |
| Callback to add a geofence to the map. Currently only supports version 1 TrafficControlMessage. More... | |
| void | externalMapMsgCallback (carma_v2x_msgs::msg::MapData::UniquePtr map_msg) |
| Callback to MAP.msg which contains intersections' static info such geometry and lane ids. More... | |
| void | addGeofence (std::shared_ptr< Geofence > gf_ptr) |
| Adds a geofence to the current map and publishes the ROS msg. More... | |
| void | removeGeofence (std::shared_ptr< Geofence > gf_ptr) |
| Removes a geofence from the current map and publishes the ROS msg. More... | |
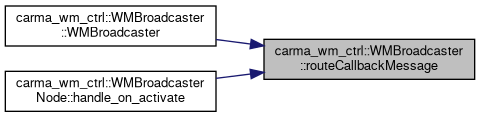
| void | routeCallbackMessage (carma_planning_msgs::msg::Route::UniquePtr route_msg) |
| Calls controlRequestFromRoute() and publishes the TrafficControlRequest Message returned after the completed operations. More... | |
| visualization_msgs::msg::Marker | composeVisualizerMarkerFromPts (const visualization_msgs::msg::MarkerArray &marker_array, const std::vector< lanelet::Point3d > &input, const std::string &label) |
| Visualizes in Rviz geometry points related to MAP msg or TrafficControlMessage. More... | |
| carma_v2x_msgs::msg::TrafficControlRequestPolygon | composeTCRStatus (const lanelet::BasicPoint3d &localPoint, const carma_v2x_msgs::msg::TrafficControlBounds &cB, const lanelet::projection::LocalFrameProjector &local_projector) |
| composeTCRStatus() compose TCM Request visualization on UI More... | |
| carma_v2x_msgs::msg::TrafficControlRequest | controlRequestFromRoute (const carma_planning_msgs::msg::Route &route_msg, std::shared_ptr< j2735_v2x_msgs::msg::Id64b > req_id_for_testing=NULL) |
| Pulls vehicle information from CARMA Cloud at startup by providing its selected route in a TrafficControlRequest message that is published after a route is selected. During operation at ~10s intervals the vehicle will make another control request for the remainder of its route. More... | |
| lanelet::Points3d | getPointsInLocalFrame (const carma_v2x_msgs::msg::TrafficControlMessageV01 &geofence_msg) |
| Extract geofence points from geofence message using its given proj and datum fields. More... | |
| lanelet::ConstLaneletOrAreas | getAffectedLaneletOrAreas (const lanelet::Points3d &gf_pts) |
| Gets the affected lanelet or areas based on the points in local frame. More... | |
| void | setMaxLaneWidth (double max_lane_width) |
| Sets the max lane width in meters. Geofence points are associated to a lanelet if they are within this distance to a lanelet as geofence points are guaranteed to apply to a single lane. More... | |
| void | setTCRBoundBoxExpansionMeters (double tcr_bbox_expansion_meters) |
| Sets much more bigger the TCR bounding box should be in addition to the route's original bounding box. This helps avoid certain situations where the box's angle might prevent carma-cloud from generating TCM. More... | |
| void | setIntersectionCoordCorrection (const std::vector< int64_t > &intersection_ids_for_correction, const std::vector< double > &intersection_correction) |
| Sets the coordinate correction for intersection. More... | |
| void | setConfigSpeedLimit (double cL) |
| Sets the configured speed limit. More... | |
| void | setVehicleParticipationType (std::string participant) |
| Set the Vehicle Participation Type. More... | |
| void | setVisualizationInfo (const std::string &tim_icon_path, double tim_icon_scale) |
| Set the RVIZ visualization information. More... | |
| std::string | getVehicleParticipationType () |
| Get the Vehicle Participation Type object. More... | |
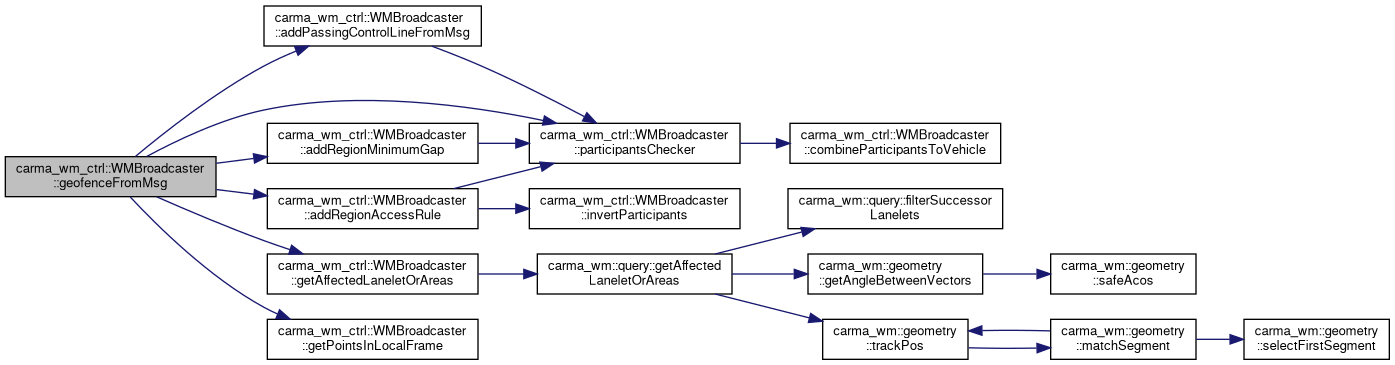
| void | geofenceFromMsg (std::shared_ptr< Geofence > gf_ptr, const carma_v2x_msgs::msg::TrafficControlMessageV01 &geofence_msg) |
| Fills geofence object from TrafficControlMessageV01 ROS Msg. More... | |
| std::vector< std::shared_ptr< Geofence > > | geofenceFromMapMsg (std::shared_ptr< Geofence > gf_ptr, const carma_v2x_msgs::msg::MapData &map_msg) |
| Fills geofence object from MAP Data ROS Msg which contains intersections' static data such as geometry and signal_group. More... | |
| double | distToNearestActiveGeofence (const lanelet::BasicPoint2d &curr_pos) |
| Returns the route distance (downtrack or crosstrack in meters) to the nearest active geofence lanelet. More... | |
| void | currentLocationCallback (geometry_msgs::msg::PoseStamped::UniquePtr current_pos) |
| carma_perception_msgs::msg::CheckActiveGeofence | checkActiveGeofenceLogic (const geometry_msgs::msg::PoseStamped ¤t_pos) |
| Returns a message indicating whether or not the vehicle is inside of an active geofence lanelet. More... | |
| void | addRegionAccessRule (std::shared_ptr< Geofence > gf_ptr, const carma_v2x_msgs::msg::TrafficControlMessageV01 &msg_v01, const std::vector< lanelet::Lanelet > &affected_llts) const |
| Adds RegionAccessRule to the map. More... | |
| void | addRegionMinimumGap (std::shared_ptr< Geofence > gf_ptr, const carma_v2x_msgs::msg::TrafficControlMessageV01 &msg_v01, double min_gap, const std::vector< lanelet::Lanelet > &affected_llts, const std::vector< lanelet::Area > &affected_areas) const |
| Adds Minimum Gap to the map. More... | |
| std::vector< std::string > | participantsChecker (const carma_v2x_msgs::msg::TrafficControlMessageV01 &msg_v01) const |
| Generates participants list. More... | |
| std::vector< std::string > | invertParticipants (const std::vector< std::string > &input_participants) const |
| Generates inverse participants list of the given participants. More... | |
| std::vector< std::string > | combineParticipantsToVehicle (const std::vector< std::string > &input_participants) const |
| Combines a list of the given participants into a single "vehicle" type if participants cover all possible vehicle types. Returns the input with no change if it doesn't cover all. More... | |
| carma_planning_msgs::msg::Route | getRoute () |
| Returns the most recently recieved route message. More... | |
| std::shared_ptr< Geofence > | createWorkzoneGeofence (std::unordered_map< uint8_t, std::shared_ptr< Geofence > > work_zone_geofence_cache) |
| Creates a single workzone geofence (in the vector) that includes all additional lanelets (housing traffic lights) and update_list that blocks old lanelets. Geofence will have minimum of 6 lanelet_additions_ (front parallel, front diagonal, middle lanelet(s), back diagonal, back parallel, 1 opposing lanelet with trafficlight). And regulatory_element_ of this geofence will be region_access_rule, where it blocks entire affected_parts of CLOSED, TAPERRIGHT, OPENRIGHT. It also blocks the opposing lane's lanelet that would have had the trafficlight, and new lanelet(s) would be added to replace it. More... | |
| void | preprocessWorkzoneGeometry (std::unordered_map< uint8_t, std::shared_ptr< Geofence > > work_zone_geofence_cache, std::shared_ptr< std::vector< lanelet::Lanelet > > parallel_llts, std::shared_ptr< std::vector< lanelet::Lanelet > > opposite_llts) |
| Preprocess for workzone area. Parallel_llts will have front_parallel and back_parallel lanelets that were created from splitting (if necessary) TAPERRIGHT and OPENRIGHT lanelets. Opposite_llts will have new lanelets split from REVERSE part with same direction as parallel lanelets that connect to diagonal ones. More... | |
| std::shared_ptr< Geofence > | createWorkzoneGeometry (std::unordered_map< uint8_t, std::shared_ptr< Geofence > > work_zone_geofence_cache, lanelet::Lanelet parallel_llt_front, lanelet::Lanelet parallel_llt_back, std::shared_ptr< std::vector< lanelet::Lanelet > > middle_opposite_lanelets) |
| Create workzone geofence. Create diagonal lanelets and a lanelet that houses opposing lane's trafficlight. Fill lanelet_additions_ with every newly created lanelets New lanelets will have traffic light. Old lanelets (and those from CLOSED) will be blocked using update_list as region_access_rule. More... | |
| std::vector< lanelet::Lanelet > | splitLaneletWithPoint (const std::vector< lanelet::BasicPoint2d > &input_pts, const lanelet::Lanelet &input_llt, double error_distance) |
| Split given lanelet with same proportion as the given points' downtrack relative to the lanelet. Newly created lanelet will have old regulatory elements copied into each of them. From the front and back boundaries, it is deemed not necessary to split if the ratios are within error_distance from either of it. For example, if front and back points of 3 points given are both within error_distance, only middle point will be used to split into 2 lanelets. It will return duplicate of old lanelet (with different id) if no splitting was done. More... | |
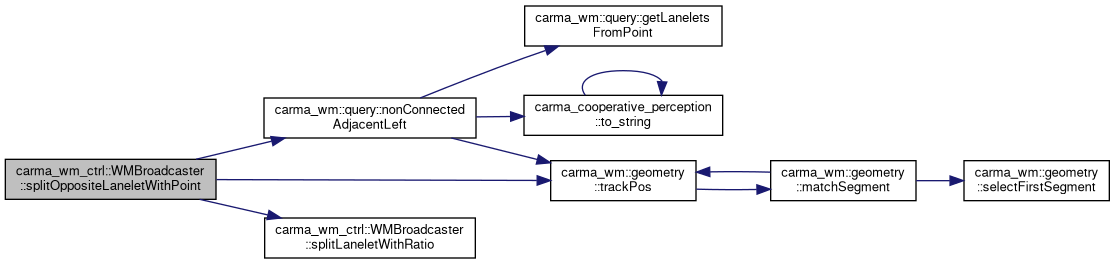
| lanelet::Lanelets | splitOppositeLaneletWithPoint (std::shared_ptr< std::vector< lanelet::Lanelet > > opposite_llts, const lanelet::BasicPoint2d &input_pt, const lanelet::Lanelet &input_llt, double error_distance) |
| Split given lanelet's adjacent, OPPOSITE lanelet with same proportion as the given point's downtrack relative to the lanelet. Newly created lanelet will have old regulatory elements copied into each of them. From the front and back boundaries, it is deemed not necessary to split if the ratios are within error_distance from either of it. It will return duplicate of old lanelet (with different id) if no splitting was done. More... | |
| std::vector< lanelet::Lanelet > | splitLaneletWithRatio (std::vector< double > ratios, lanelet::Lanelet input_lanelet, double error_distance) const |
| Split given lanelet with given downtrack ratios relative to the lanelet. Newly created lanelet will have old regulatory elements copied into each of them. From the front and back boundaries, it is deemed not necessary to split if the ratios are within error_distance from either of it. For example, if front and back points of 3 ratios given are both within error_distance, only middle ratio will be used to split, so 2 lanelets will be returned. It will return duplicate of old lanelet (with different id) if no splitting was done. More... | |
| uint32_t | generate32BitId (const std::string &label) |
| helper for generating 32bit traffic light Id from TCM label field consisting workzone intersection/signal group ids More... | |
| bool | convertLightIdToInterGroupId (unsigned &intersection_id, unsigned &group_id, const lanelet::Id &lanelet_id) |
| helper for generating intersection and group Id of a traffic light from lanelet id More... | |
| void | setErrorDistance (double error_distance) |
| void | publishLightId () |
| helps to populate upcoming_intersection_ids_ from local traffic lanelet ids More... | |
| void | setConfigVehicleId (const std::string &vehicle_id) |
| Retrieve the vehicle ID from global vehicle parameters, and set instance memeber vehicle id. More... | |
| void | setConfigACKPubTimes (int ack_pub_times) |
| Sets the TCM Acknowledgement publish times. More... | |
| void | pubTCMACK (j2735_v2x_msgs::msg::Id64b tcm_req_id, uint16_t msgnum, int ack_status, const std::string &ack_reason) |
| Construct TCM acknowledgement object and populate it with params. Publish the object for a configured number of times. More... | |
| void | updateUpcomingSGIntersectionIds () |
| populate upcoming_intersection_ids_ from local traffic lanelet ids More... | |
Public Attributes | |
| visualization_msgs::msg::MarkerArray | tcm_marker_array_ |
| visualization_msgs::msg::MarkerArray | j2735_map_msg_marker_array_ |
| carma_v2x_msgs::msg::TrafficControlRequestPolygon | tcr_polygon_ |
| std_msgs::msg::Int32MultiArray | upcoming_intersection_ids_ |
Private Types | |
| enum class | AcknowledgementStatus { ACKNOWLEDGED = 1 , REJECTED = 2 } |
Private Member Functions | |
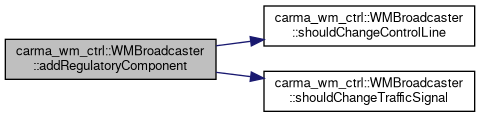
| void | addRegulatoryComponent (std::shared_ptr< Geofence > gf_ptr) const |
| void | addBackRegulatoryComponent (std::shared_ptr< Geofence > gf_ptr) const |
| void | removeGeofenceHelper (std::shared_ptr< Geofence > gf_ptr) const |
| void | addGeofenceHelper (std::shared_ptr< Geofence > gf_ptr) |
| bool | shouldChangeControlLine (const lanelet::ConstLaneletOrArea &el, const lanelet::RegulatoryElementConstPtr ®em, std::shared_ptr< Geofence > gf_ptr) const |
| This is a helper function that returns true if the provided regem is marked to be changed by the geofence as there are usually multiple passing control lines are in the lanelet. More... | |
| bool | shouldChangeTrafficSignal (const lanelet::ConstLaneletOrArea &el, const lanelet::RegulatoryElementConstPtr ®em, std::shared_ptr< carma_wm::SignalizedIntersectionManager > sim) const |
| This is a helper function that returns true if signal in the lanelet should be changed according to the records of signalizer intersection manager Used in managing multiple signal_groups in a single entry lanelet for example. More... | |
| void | addPassingControlLineFromMsg (std::shared_ptr< Geofence > gf_ptr, const carma_v2x_msgs::msg::TrafficControlMessageV01 &msg_v01, const std::vector< lanelet::Lanelet > &affected_llts) const |
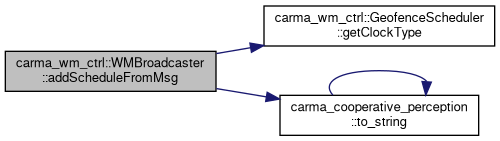
| void | addScheduleFromMsg (std::shared_ptr< Geofence > gf_ptr, const carma_v2x_msgs::msg::TrafficControlMessageV01 &msg_v01) |
| Populates the schedules member of the geofence object from given TrafficControlMessageV01 message. More... | |
| void | scheduleGeofence (std::shared_ptr< carma_wm_ctrl::Geofence > gf_ptr_list) |
| lanelet::LineString3d | createLinearInterpolatingLinestring (const lanelet::Point3d &front_pt, const lanelet::Point3d &back_pt, double increment_distance=0.25) |
| lanelet::Lanelet | createLinearInterpolatingLanelet (const lanelet::Point3d &left_front_pt, const lanelet::Point3d &right_front_pt, const lanelet::Point3d &left_back_pt, const lanelet::Point3d &right_back_pt, double increment_distance=0.25) |
| std::unordered_set< lanelet::Lanelet > | filterSuccessorLanelets (const std::unordered_set< lanelet::Lanelet > &possible_lanelets, const std::unordered_set< lanelet::Lanelet > &root_lanelets) |
Private Attributes | |
| double | error_distance_ = 5 |
| lanelet::ConstLanelets | route_path_ |
| std::unordered_set< lanelet::Id > | active_geofence_llt_ids_ |
| std::unordered_map< uint8_t, std::shared_ptr< Geofence > > | work_zone_geofence_cache_ |
| std::unordered_map< uint32_t, lanelet::Id > | traffic_light_id_lookup_ |
| lanelet::LaneletMapPtr | base_map_ |
| lanelet::LaneletMapPtr | current_map_ |
| lanelet::routing::RoutingGraphPtr | current_routing_graph_ |
| lanelet::Velocity | config_limit |
| std::string | participant_ = lanelet::Participants::VehicleCar |
| std::unordered_set< std::string > | checked_geofence_ids_ |
| std::unordered_set< std::string > | generated_geofence_reqids_ |
| std::vector< lanelet::LaneletMapPtr > | cached_maps_ |
| std::mutex | map_mutex_ |
| PublishMapCallback | map_pub_ |
| PublishMapUpdateCallback | map_update_pub_ |
| PublishCtrlRequestCallback | control_msg_pub_ |
| PublishActiveGeofCallback | active_pub_ |
| GeofenceScheduler | scheduler_ |
| PublishMobilityOperationCallback | tcm_ack_pub_ |
| std::string | base_map_georef_ |
| double | max_lane_width_ |
| double | tcr_bbox_expansion_meters_ |
| std::vector< carma_v2x_msgs::msg::TrafficControlMessageV01 > | workzone_remaining_msgs_ |
| bool | workzone_geometry_published_ = false |
| size_t | current_map_version_ = 0 |
| std::string | tim_icon_path_ = "package://carma_wm_ctrl/meshes/cop.obj" |
| double | tim_icon_scale_ = 0.0025 |
| carma_planning_msgs::msg::Route | current_route |
| std::vector< autoware_lanelet2_msgs::msg::MapBin > | map_update_message_queue_ |
| size_t | update_count_ = -1 |
| std::shared_ptr< carma_wm::SignalizedIntersectionManager > | sim_ |
| const std::string | geofence_ack_strategy_ = "carma3/Geofence_Acknowledgement" |
| int | ack_pub_times_ = 1 |
| std::string | vehicle_id_ |
Detailed Description
Class which provies exposes map publication and carma_wm update logic.
The WMBroadcaster handles updating the lanelet2 base map and publishing the new versions to the rest of the CARMA Platform ROS network. The broadcaster also provides functions for adding or removing geofences from the map and notifying the rest of the system.
Definition at line 72 of file WMBroadcaster.hpp.
Member Typedef Documentation
◆ PublishActiveGeofCallback
| using carma_wm_ctrl::WMBroadcaster::PublishActiveGeofCallback = std::function<void(const carma_perception_msgs::msg::CheckActiveGeofence&)> |
Definition at line 78 of file WMBroadcaster.hpp.
◆ PublishCtrlRequestCallback
| using carma_wm_ctrl::WMBroadcaster::PublishCtrlRequestCallback = std::function<void(const carma_v2x_msgs::msg::TrafficControlRequest&)> |
Definition at line 77 of file WMBroadcaster.hpp.
◆ PublishMapCallback
| using carma_wm_ctrl::WMBroadcaster::PublishMapCallback = std::function<void(const autoware_lanelet2_msgs::msg::MapBin&)> |
Definition at line 75 of file WMBroadcaster.hpp.
◆ PublishMapUpdateCallback
| using carma_wm_ctrl::WMBroadcaster::PublishMapUpdateCallback = std::function<void(const autoware_lanelet2_msgs::msg::MapBin&)> |
Definition at line 76 of file WMBroadcaster.hpp.
◆ PublishMobilityOperationCallback
| using carma_wm_ctrl::WMBroadcaster::PublishMobilityOperationCallback = std::function<void(const carma_v2x_msgs::msg::MobilityOperation&)> |
Definition at line 79 of file WMBroadcaster.hpp.
Member Enumeration Documentation
◆ AcknowledgementStatus
|
strongprivate |
| Enumerator | |
|---|---|
| ACKNOWLEDGED | |
| REJECTED | |
Definition at line 488 of file WMBroadcaster.hpp.
Constructor & Destructor Documentation
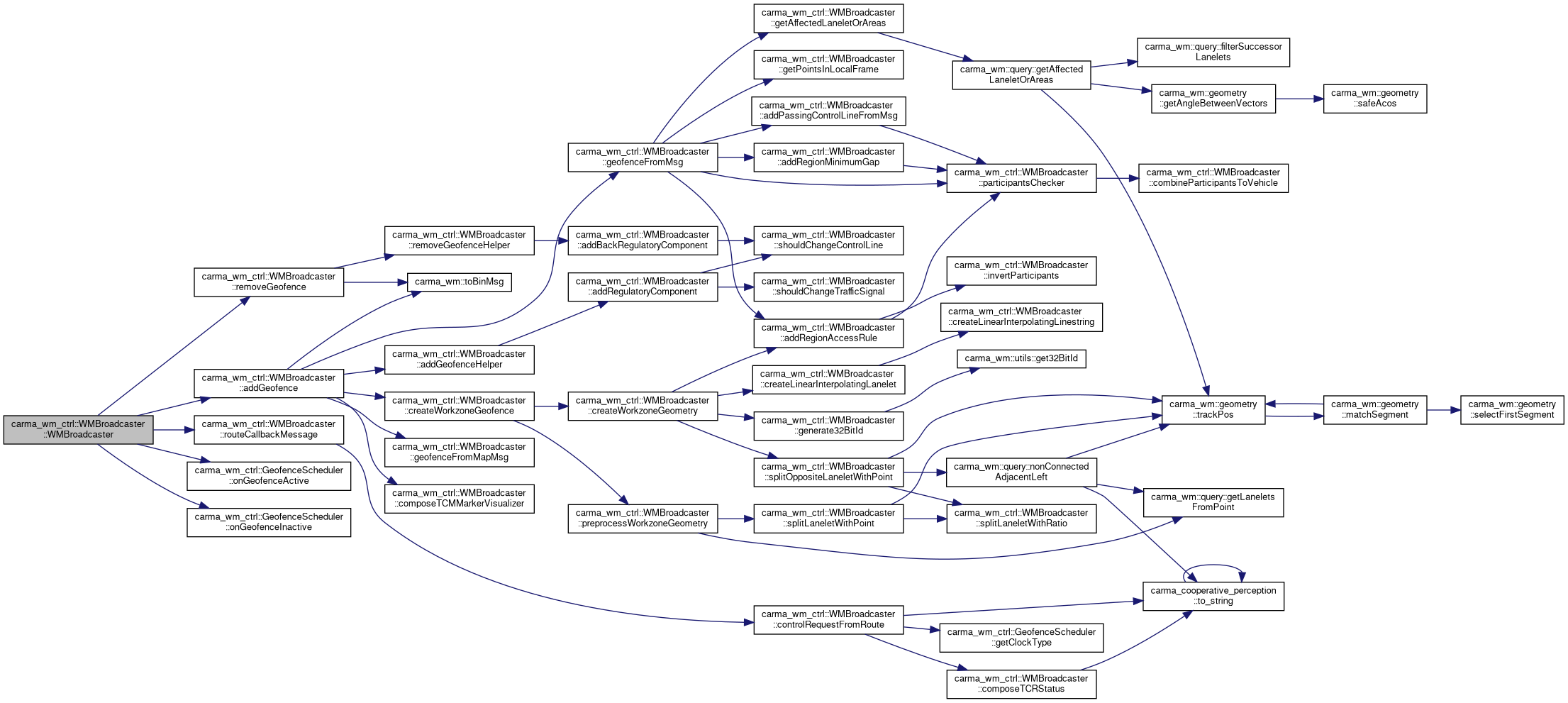
◆ WMBroadcaster()
| carma_wm_ctrl::WMBroadcaster::WMBroadcaster | ( | const PublishMapCallback & | map_pub, |
| const PublishMapUpdateCallback & | map_update_pub, | ||
| const PublishCtrlRequestCallback & | control_msg_pub, | ||
| const PublishActiveGeofCallback & | active_pub, | ||
| std::shared_ptr< carma_ros2_utils::timers::TimerFactory > | timer_factory, | ||
| const PublishMobilityOperationCallback & | tcm_ack_pub | ||
| ) |
Constructor.
Definition at line 47 of file WMBroadcaster.cpp.
References addGeofence(), carma_wm_ctrl::GeofenceScheduler::onGeofenceActive(), carma_wm_ctrl::GeofenceScheduler::onGeofenceInactive(), removeGeofence(), routeCallbackMessage(), and scheduler_.
Member Function Documentation
◆ addBackRegulatoryComponent()
|
private |
Definition at line 1467 of file WMBroadcaster.cpp.
References current_map_, and shouldChangeControlLine().
Referenced by removeGeofenceHelper().


◆ addGeofence()
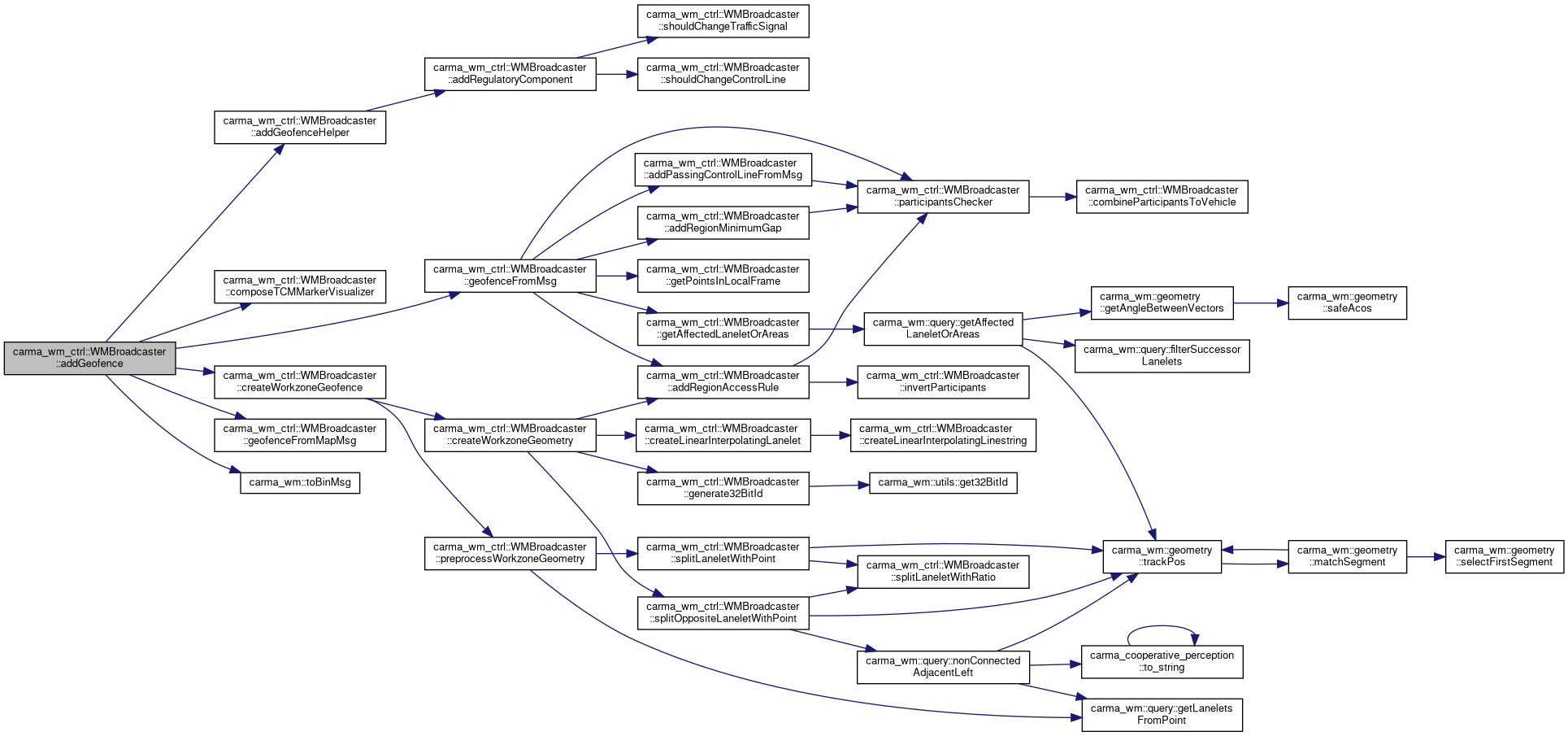
| void carma_wm_ctrl::WMBroadcaster::addGeofence | ( | std::shared_ptr< Geofence > | gf_ptr | ) |
Adds a geofence to the current map and publishes the ROS msg.
Definition at line 1498 of file WMBroadcaster.cpp.
References active_geofence_llt_ids_, addGeofenceHelper(), composeVisualizerMarkerFromPts(), createWorkzoneGeofence(), current_map_, current_map_version_, current_routing_graph_, geofenceFromMapMsg(), geofenceFromMsg(), j2735_map_msg_marker_array_, carma_wm_ctrl::MAP_MSG_INTERSECTION, map_mutex_, map_update_pub_, participant_, sim_, tcm_marker_array_, carma_wm::toBinMsg(), update_count_, and work_zone_geofence_cache_.
Referenced by WMBroadcaster().

◆ addGeofenceHelper()
|
private |
Definition at line 2018 of file WMBroadcaster.cpp.
References addRegulatoryComponent(), current_map_, and traffic_light_id_lookup_.
Referenced by addGeofence().


◆ addPassingControlLineFromMsg()
|
private |
Definition at line 887 of file WMBroadcaster.cpp.
References participantsChecker().
Referenced by geofenceFromMsg().


◆ addRegionAccessRule()
| void carma_wm_ctrl::WMBroadcaster::addRegionAccessRule | ( | std::shared_ptr< Geofence > | gf_ptr, |
| const carma_v2x_msgs::msg::TrafficControlMessageV01 & | msg_v01, | ||
| const std::vector< lanelet::Lanelet > & | affected_llts | ||
| ) | const |
Adds RegionAccessRule to the map.
- Parameters
-
gf_ptr geofence pointer msg_v01 message type afffected_llts affected lanelets
Definition at line 933 of file WMBroadcaster.cpp.
References invertParticipants(), and participantsChecker().
Referenced by createWorkzoneGeometry(), and geofenceFromMsg().


◆ addRegionMinimumGap()
| void carma_wm_ctrl::WMBroadcaster::addRegionMinimumGap | ( | std::shared_ptr< Geofence > | gf_ptr, |
| const carma_v2x_msgs::msg::TrafficControlMessageV01 & | msg_v01, | ||
| double | min_gap, | ||
| const std::vector< lanelet::Lanelet > & | affected_llts, | ||
| const std::vector< lanelet::Area > & | affected_areas | ||
| ) | const |
Adds Minimum Gap to the map.
- Parameters
-
gf_ptr geofence pointer double min_gap afffected_llts affected lanelets affected_areas affected areas
Definition at line 950 of file WMBroadcaster.cpp.
References participantsChecker().
Referenced by geofenceFromMsg().


◆ addRegulatoryComponent()
|
private |
Definition at line 1426 of file WMBroadcaster.cpp.
References current_map_, shouldChangeControlLine(), shouldChangeTrafficSignal(), and sim_.
Referenced by addGeofenceHelper().

◆ addScheduleFromMsg()
|
private |
Populates the schedules member of the geofence object from given TrafficControlMessageV01 message.
- Parameters
-
gf_ptr geofence pointer msg_v01 TrafficControlMessageV01 (geofence msg)
Definition at line 117 of file WMBroadcaster.cpp.
References carma_wm_ctrl::GeofenceScheduler::getClockType(), process_bag::i, scheduler_, and carma_cooperative_perception::to_string().
Referenced by externalMapMsgCallback(), and geofenceCallback().

◆ baseMapCallback()
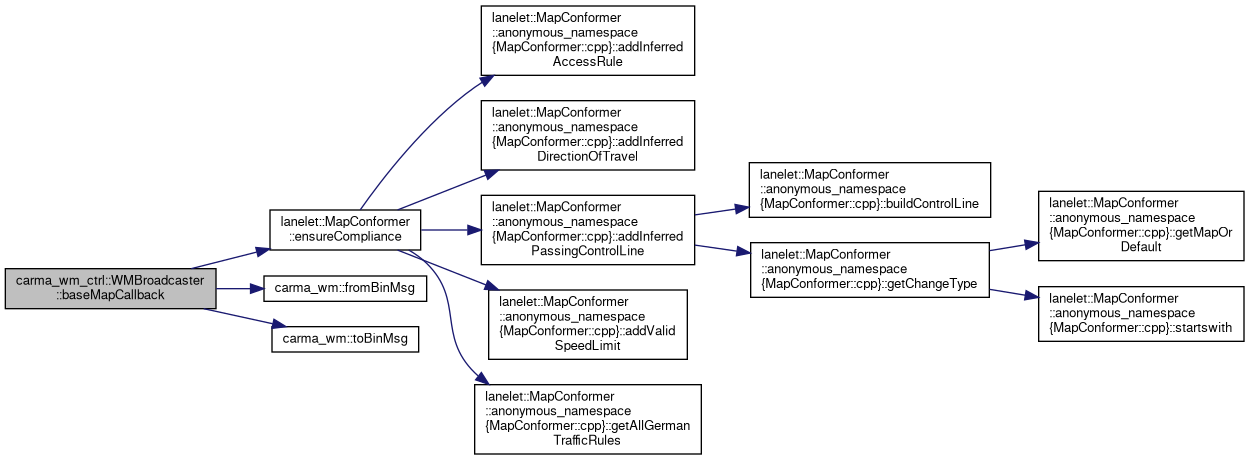
| void carma_wm_ctrl::WMBroadcaster::baseMapCallback | ( | autoware_lanelet2_msgs::msg::MapBin::UniquePtr | map_msg | ) |
Callback to set the base map when it has been loaded.
- Parameters
-
map_msg The map message to use as the base map
Definition at line 56 of file WMBroadcaster.cpp.
References base_map_, config_limit, current_map_, current_map_version_, current_routing_graph_, lanelet::MapConformer::ensureCompliance(), carma_wm::fromBinMsg(), map_mutex_, map_pub_, participant_, and carma_wm::toBinMsg().
Referenced by carma_wm_ctrl::WMBroadcasterNode::handle_on_activate().

◆ checkActiveGeofenceLogic()
| carma_perception_msgs::msg::CheckActiveGeofence carma_wm_ctrl::WMBroadcaster::checkActiveGeofenceLogic | ( | const geometry_msgs::msg::PoseStamped & | current_pos | ) |
Returns a message indicating whether or not the vehicle is inside of an active geofence lanelet.
- Parameters
-
current_pos Current position of the vehicle
- Returns
- 0 if vehicle is not on an active geofence
Definition at line 2118 of file WMBroadcaster.cpp.
References active_geofence_llt_ids_, current_map_, and distToNearestActiveGeofence().
Referenced by currentLocationCallback().


◆ combineParticipantsToVehicle()
| std::vector< std::string > carma_wm_ctrl::WMBroadcaster::combineParticipantsToVehicle | ( | const std::vector< std::string > & | input_participants | ) | const |
Combines a list of the given participants into a single "vehicle" type if participants cover all possible vehicle types. Returns the input with no change if it doesn't cover all.
- Parameters
-
std::vector<std::string> participants vector of strings
Definition at line 1016 of file WMBroadcaster.cpp.
Referenced by participantsChecker().

◆ composeTCRStatus()
| carma_v2x_msgs::msg::TrafficControlRequestPolygon carma_wm_ctrl::WMBroadcaster::composeTCRStatus | ( | const lanelet::BasicPoint3d & | localPoint, |
| const carma_v2x_msgs::msg::TrafficControlBounds & | cB, | ||
| const lanelet::projection::LocalFrameProjector & | local_projector | ||
| ) |
composeTCRStatus() compose TCM Request visualization on UI
- Parameters
-
input The message containing tcr information
Definition at line 1842 of file WMBroadcaster.cpp.
References process_bag::i, and carma_cooperative_perception::to_string().
Referenced by controlRequestFromRoute().


◆ composeVisualizerMarkerFromPts()
| visualization_msgs::msg::Marker carma_wm_ctrl::WMBroadcaster::composeVisualizerMarkerFromPts | ( | const visualization_msgs::msg::MarkerArray & | marker_array, |
| const std::vector< lanelet::Point3d > & | input, | ||
| const std::string & | label | ||
| ) |
Visualizes in Rviz geometry points related to MAP msg or TrafficControlMessage.
- Parameters
-
marker_array Previously visualized markers if available to continue marker id input geometry points to visualize label tcm label to determine marker shape
- Returns
- MarkerArray containing only the new visualization from the gf pts intended to be appended to the previous markers
Definition at line 1876 of file WMBroadcaster.cpp.
References process_bag::i, tim_icon_path_, and tim_icon_scale_.
Referenced by addGeofence().

◆ controlRequestFromRoute()
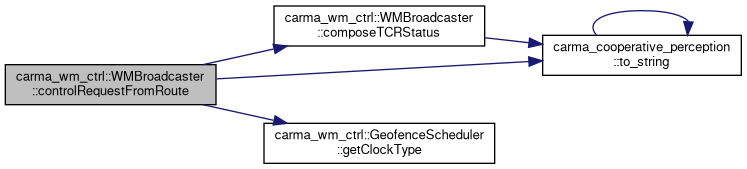
| carma_v2x_msgs::msg::TrafficControlRequest carma_wm_ctrl::WMBroadcaster::controlRequestFromRoute | ( | const carma_planning_msgs::msg::Route & | route_msg, |
| std::shared_ptr< j2735_v2x_msgs::msg::Id64b > | req_id_for_testing = NULL |
||
| ) |
Pulls vehicle information from CARMA Cloud at startup by providing its selected route in a TrafficControlRequest message that is published after a route is selected. During operation at ~10s intervals the vehicle will make another control request for the remainder of its route.
- Parameters
-
route_msg The message containing route information pulled from routeCallbackMessage() req_id_for_testing this ptr is optional. it gives req_id for developer to test TrafficControlMessage as it needs it
Definition at line 1686 of file WMBroadcaster.cpp.
References base_map_georef_, composeTCRStatus(), current_map_, generated_geofence_reqids_, carma_wm_ctrl::GeofenceScheduler::getClockType(), process_bag::i, route_path_, scheduler_, tcr_bbox_expansion_meters_, tcr_polygon_, and carma_cooperative_perception::to_string().
Referenced by routeCallbackMessage().

◆ convertLightIdToInterGroupId()
| bool carma_wm_ctrl::WMBroadcaster::convertLightIdToInterGroupId | ( | unsigned & | intersection_id, |
| unsigned & | group_id, | ||
| const lanelet::Id & | lanelet_id | ||
| ) |
helper for generating intersection and group Id of a traffic light from lanelet id
- Parameters
-
[in] traffic lanelet_id [out] intersection_id and group_id
- Returns
- return true if conversion was successful
Definition at line 2062 of file WMBroadcaster.cpp.
References traffic_light_id_lookup_.
Referenced by publishLightId().

◆ createLinearInterpolatingLanelet()
|
private |
Definition at line 2293 of file WMBroadcaster.cpp.
References createLinearInterpolatingLinestring().
Referenced by createWorkzoneGeometry().


◆ createLinearInterpolatingLinestring()
|
private |
Definition at line 2272 of file WMBroadcaster.cpp.
References visualize_xodr::dx, and visualize_xodr::dy.
Referenced by createLinearInterpolatingLanelet().

◆ createWorkzoneGeofence()
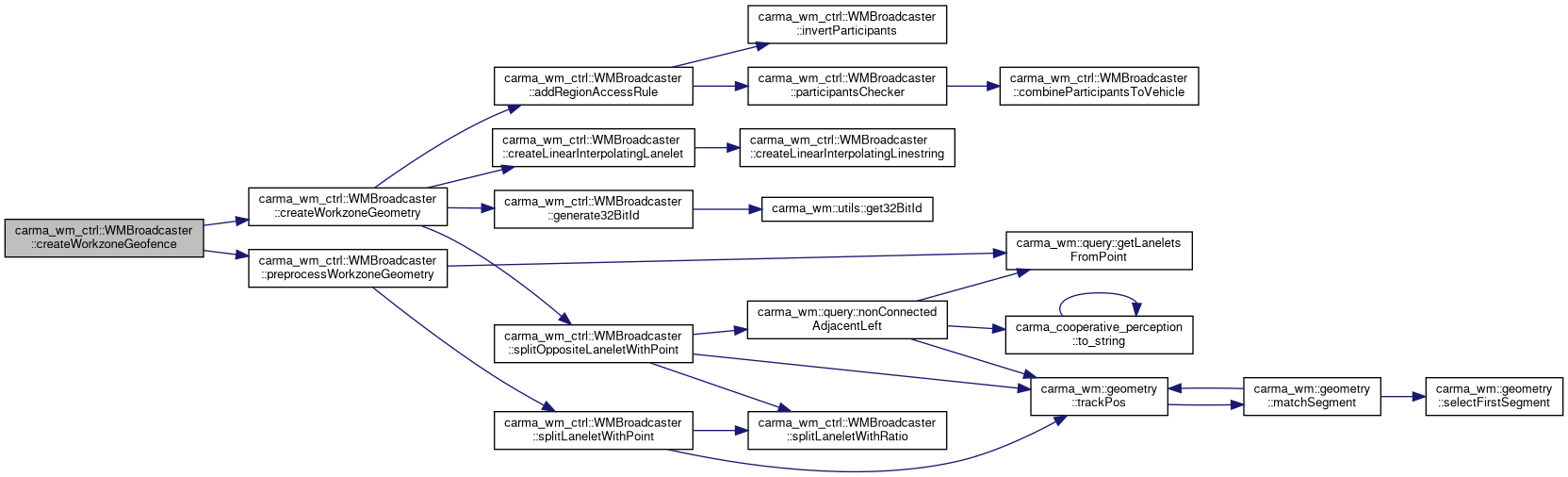
| std::shared_ptr< Geofence > carma_wm_ctrl::WMBroadcaster::createWorkzoneGeofence | ( | std::unordered_map< uint8_t, std::shared_ptr< Geofence > > | work_zone_geofence_cache | ) |
Creates a single workzone geofence (in the vector) that includes all additional lanelets (housing traffic lights) and update_list that blocks old lanelets. Geofence will have minimum of 6 lanelet_additions_ (front parallel, front diagonal, middle lanelet(s), back diagonal, back parallel, 1 opposing lanelet with trafficlight). And regulatory_element_ of this geofence will be region_access_rule, where it blocks entire affected_parts of CLOSED, TAPERRIGHT, OPENRIGHT. It also blocks the opposing lane's lanelet that would have had the trafficlight, and new lanelet(s) would be added to replace it.
- Parameters
-
work_zone_geofence_cache Geofence map with size of 4 corresponding to CLOSED, TAPERRIGHT, OPENRIGHT, REVERSE TrafficControlMessages. Each should have gf_pts, affected_parts, schedule, and id filled. TAPERRIGHT's id and schedule is used as all should have same schedule.
- Exceptions
-
InvalidObjectStateError if no map is available
- Returns
- geofence housing all necessary workzone elements
Definition at line 400 of file WMBroadcaster.cpp.
References createWorkzoneGeometry(), preprocessWorkzoneGeometry(), and carma_wm_ctrl::WorkZoneSection::TAPERRIGHT.
Referenced by addGeofence().

◆ createWorkzoneGeometry()
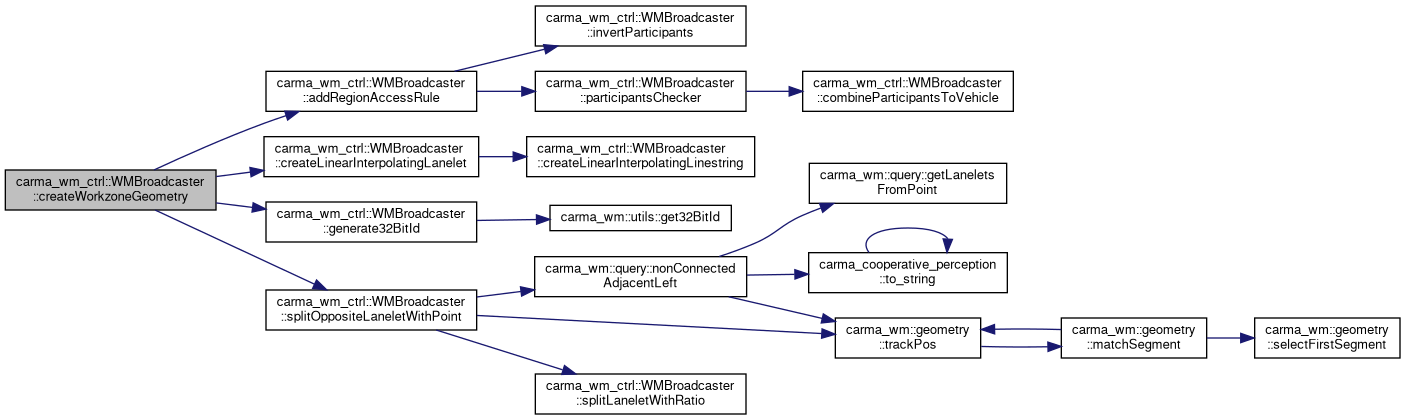
| std::shared_ptr< Geofence > carma_wm_ctrl::WMBroadcaster::createWorkzoneGeometry | ( | std::unordered_map< uint8_t, std::shared_ptr< Geofence > > | work_zone_geofence_cache, |
| lanelet::Lanelet | parallel_llt_front, | ||
| lanelet::Lanelet | parallel_llt_back, | ||
| std::shared_ptr< std::vector< lanelet::Lanelet > > | middle_opposite_lanelets | ||
| ) |
Create workzone geofence. Create diagonal lanelets and a lanelet that houses opposing lane's trafficlight. Fill lanelet_additions_ with every newly created lanelets New lanelets will have traffic light. Old lanelets (and those from CLOSED) will be blocked using update_list as region_access_rule.
- Parameters
-
work_zone_geofence_cache Geofence map with size of 4 corresponding to CLOSED, TAPERRIGHT, OPENRIGHT, REVERSE TrafficControlMessages. Each should have gf_pts, affected_parts. parallel_llt_front A lanelet whose end should connect to front diagonal lanelet parallel_llt_back A lanelet whose start should connect to back diagonal lanelet middle_opposite_lanelets A getInterGroupIdsByLightReg() connects to back diagonal (their directions are expected to be opposite of parallel ones)
- Exceptions
-
InvalidObjectStateError if no map is available
Definition at line 427 of file WMBroadcaster.cpp.
References addRegionAccessRule(), carma_wm_ctrl::WorkZoneSection::CLOSED, createLinearInterpolatingLanelet(), current_map_, error_distance_, generate32BitId(), process_bag::i, carma_wm_ctrl::WorkZoneSection::OPENRIGHT, carma_wm_ctrl::WorkZoneSection::REVERSE, splitOppositeLaneletWithPoint(), and carma_wm_ctrl::WorkZoneSection::TAPERRIGHT.
Referenced by createWorkzoneGeofence().

◆ currentLocationCallback()
| void carma_wm_ctrl::WMBroadcaster::currentLocationCallback | ( | geometry_msgs::msg::PoseStamped::UniquePtr | current_pos | ) |
Definition at line 2052 of file WMBroadcaster.cpp.
References active_pub_, checkActiveGeofenceLogic(), and current_map_.
Referenced by carma_wm_ctrl::WMBroadcasterNode::handle_on_activate().


◆ distToNearestActiveGeofence()
| double carma_wm_ctrl::WMBroadcaster::distToNearestActiveGeofence | ( | const lanelet::BasicPoint2d & | curr_pos | ) |
Returns the route distance (downtrack or crosstrack in meters) to the nearest active geofence lanelet.
- Parameters
-
curr_pos Current position in local coordinates
- Exceptions
-
InvalidObjectStateError if base_map is not set std::invalid_argument if curr_pos is not on the road
- Returns
- 0 if there is no active geofence on the vehicle's route
Definition at line 1974 of file WMBroadcaster.cpp.
References active_geofence_llt_ids_, carma_wm::TrackPos::crosstrack, current_map_, carma_wm::TrackPos::downtrack, map_mutex_, route_path_, and carma_wm::geometry::trackPos().
Referenced by checkActiveGeofenceLogic().


◆ externalMapMsgCallback()
| void carma_wm_ctrl::WMBroadcaster::externalMapMsgCallback | ( | carma_v2x_msgs::msg::MapData::UniquePtr | map_msg | ) |
Callback to MAP.msg which contains intersections' static info such geometry and lane ids.
- Parameters
-
map_msg The ROS msg of the MAP.msg to process
Definition at line 1037 of file WMBroadcaster.cpp.
References addScheduleFromMsg(), current_map_, scheduleGeofence(), and sim_.
Referenced by carma_wm_ctrl::WMBroadcasterNode::handle_on_activate().


◆ filterSuccessorLanelets()
|
private |
◆ generate32BitId()
| uint32_t carma_wm_ctrl::WMBroadcaster::generate32BitId | ( | const std::string & | label | ) |
helper for generating 32bit traffic light Id from TCM label field consisting workzone intersection/signal group ids
Definition at line 1262 of file WMBroadcaster.cpp.
References carma_wm::utils::get32BitId().
Referenced by createWorkzoneGeometry().


◆ geofenceCallback()
| void carma_wm_ctrl::WMBroadcaster::geofenceCallback | ( | carma_v2x_msgs::msg::TrafficControlMessage::UniquePtr | geofence_msg | ) |
Callback to add a geofence to the map. Currently only supports version 1 TrafficControlMessage.
- Parameters
-
geofence_msg The ROS msg of the geofence to add.
Definition at line 1081 of file WMBroadcaster.cpp.
References ACKNOWLEDGED, addScheduleFromMsg(), checked_geofence_ids_, generated_geofence_reqids_, process_bag::i, map_mutex_, pubTCMACK(), REJECTED, scheduleGeofence(), and carma_cooperative_perception::to_string().
Referenced by carma_wm_ctrl::WMBroadcasterNode::handle_on_activate().


◆ geofenceFromMapMsg()
| std::vector< std::shared_ptr< Geofence > > carma_wm_ctrl::WMBroadcaster::geofenceFromMapMsg | ( | std::shared_ptr< Geofence > | gf_ptr, |
| const carma_v2x_msgs::msg::MapData & | map_msg | ||
| ) |
Fills geofence object from MAP Data ROS Msg which contains intersections' static data such as geometry and signal_group.
- Parameters
-
Geofence object to fill with information extracted from this msg geofence_msg The MAP ROS msg that contains intersection information
- Exceptions
-
InvalidObjectStateError if base_map is not set or the base_map's georeference is empty
Definition at line 217 of file WMBroadcaster.cpp.
References current_map_, current_routing_graph_, carma_wm_ctrl::MAP_MSG_INTERSECTION, carma_wm_ctrl::MAP_MSG_TF_SIGNAL, and sim_.
Referenced by addGeofence().

◆ geofenceFromMsg()
| void carma_wm_ctrl::WMBroadcaster::geofenceFromMsg | ( | std::shared_ptr< Geofence > | gf_ptr, |
| const carma_v2x_msgs::msg::TrafficControlMessageV01 & | geofence_msg | ||
| ) |
Fills geofence object from TrafficControlMessageV01 ROS Msg.
- Parameters
-
Geofence object to fill with information extracted from this msg and previously cached msgs that are relevant geofence_msg The ROS msg that contains geofence information
- Exceptions
-
InvalidObjectStateError if base_map is not set or the base_map's georeference is empty
Definition at line 269 of file WMBroadcaster.cpp.
References addPassingControlLineFromMsg(), addRegionAccessRule(), addRegionMinimumGap(), config_limit, current_map_, getAffectedLaneletOrAreas(), getPointsInLocalFrame(), participantsChecker(), carma_wm_ctrl::WorkZoneSection::REVERSE, and work_zone_geofence_cache_.
Referenced by addGeofence().

◆ geoReferenceCallback()
| void carma_wm_ctrl::WMBroadcaster::geoReferenceCallback | ( | std_msgs::msg::String::UniquePtr | geo_ref | ) |
Callback to set the base map georeference (proj string)
- Parameters
-
georef_msg Proj string that specifies the georeference of the map. It is used for transfering frames between that of geofence and that of the vehicle
Definition at line 1202 of file WMBroadcaster.cpp.
References base_map_georef_, map_mutex_, and sim_.
Referenced by carma_wm_ctrl::WMBroadcasterNode::handle_on_activate().

◆ getAffectedLaneletOrAreas()
| lanelet::ConstLaneletOrAreas carma_wm_ctrl::WMBroadcaster::getAffectedLaneletOrAreas | ( | const lanelet::Points3d & | gf_pts | ) |
Gets the affected lanelet or areas based on the points in local frame.
- Parameters
-
geofence_msg lanelet::Points3d in local frame NOTE:Currently this function only checks lanelets and will be expanded to areas in the future.
Definition at line 1354 of file WMBroadcaster.cpp.
References current_map_, current_routing_graph_, carma_wm::query::getAffectedLaneletOrAreas(), and max_lane_width_.
Referenced by geofenceFromMsg().


◆ getPointsInLocalFrame()
| lanelet::Points3d carma_wm_ctrl::WMBroadcaster::getPointsInLocalFrame | ( | const carma_v2x_msgs::msg::TrafficControlMessageV01 & | geofence_msg | ) |
Extract geofence points from geofence message using its given proj and datum fields.
- Parameters
-
geofence_msg The ROS msg that contains proj and any point that lie on the target lanelet or area
- Exceptions
-
InvalidObjectStateError if base_map is not set or the base_map's georeference is empty
- Returns
- lanelet::Points3d in local frame
Definition at line 1274 of file WMBroadcaster.cpp.
References base_map_georef_, process_traj_logs::c, and current_map_.
Referenced by geofenceFromMsg().

◆ getRoute()
| carma_planning_msgs::msg::Route carma_wm_ctrl::WMBroadcaster::getRoute | ( | ) |
Returns the most recently recieved route message.
- Returns
- The most recent route message.
Definition at line 1667 of file WMBroadcaster.cpp.
References current_route.
◆ getVehicleParticipationType()
| std::string carma_wm_ctrl::WMBroadcaster::getVehicleParticipationType | ( | ) |
Get the Vehicle Participation Type object.
- Returns
- Current Vehicle Participation Type being used in this World Model Instance
Definition at line 1251 of file WMBroadcaster.cpp.
References participant_.
◆ invertParticipants()
| std::vector< std::string > carma_wm_ctrl::WMBroadcaster::invertParticipants | ( | const std::vector< std::string > & | input_participants | ) | const |
Generates inverse participants list of the given participants.
- Parameters
-
std::vector<std::string> participants vector of strings
Definition at line 1000 of file WMBroadcaster.cpp.
Referenced by addRegionAccessRule().

◆ participantsChecker()
| std::vector< std::string > carma_wm_ctrl::WMBroadcaster::participantsChecker | ( | const carma_v2x_msgs::msg::TrafficControlMessageV01 & | msg_v01 | ) | const |
Generates participants list.
- Parameters
-
msg_v01 message type
Definition at line 958 of file WMBroadcaster.cpp.
References combineParticipantsToVehicle().
Referenced by addPassingControlLineFromMsg(), addRegionAccessRule(), addRegionMinimumGap(), and geofenceFromMsg().


◆ preprocessWorkzoneGeometry()
| void carma_wm_ctrl::WMBroadcaster::preprocessWorkzoneGeometry | ( | std::unordered_map< uint8_t, std::shared_ptr< Geofence > > | work_zone_geofence_cache, |
| std::shared_ptr< std::vector< lanelet::Lanelet > > | parallel_llts, | ||
| std::shared_ptr< std::vector< lanelet::Lanelet > > | opposite_llts | ||
| ) |
Preprocess for workzone area. Parallel_llts will have front_parallel and back_parallel lanelets that were created from splitting (if necessary) TAPERRIGHT and OPENRIGHT lanelets. Opposite_llts will have new lanelets split from REVERSE part with same direction as parallel lanelets that connect to diagonal ones.
- Parameters
-
work_zone_geofence_cache Geofence map with size of 4 corresponding to CLOSED, TAPERRIGHT, OPENRIGHT, REVERSE TrafficControlMessages. Each should have gf_pts, affected_parts. parallel_llts list holding front_parallel and back_parallel. These are created from splitting old ones in place such that they connect to diagonal ones opposite_llts list holding split and filtered lanelets from REVERSE part that connect to diagonal ones
- Exceptions
-
InvalidObjectStateError if no map is available NOTE: REVERSE part's geofence points should have same direction as opposite lane's as that is what getAffectedLaneletOrArea requires.
PARALLEL FRONT (TAPERRIGHT side)
PARALLEL BACK (OPENRIGHT side)
HANDLE MID HERE
OPPOSITE FRONT (OPENRIGHT side)
Fill in the middle part of middle lanelets
OPPOSITE BACK (TAPERRIGHT side)
Definition at line 607 of file WMBroadcaster.cpp.
References current_map_, current_routing_graph_, error_distance_, carma_wm::query::getLaneletsFromPoint(), process_bag::i, carma_wm_ctrl::WorkZoneSection::OPENRIGHT, carma_wm_ctrl::WorkZoneSection::REVERSE, splitLaneletWithPoint(), and carma_wm_ctrl::WorkZoneSection::TAPERRIGHT.
Referenced by createWorkzoneGeofence().


◆ publishLightId()
| void carma_wm_ctrl::WMBroadcaster::publishLightId | ( | ) |
helps to populate upcoming_intersection_ids_ from local traffic lanelet ids
Definition at line 2077 of file WMBroadcaster.cpp.
References convertLightIdToInterGroupId(), current_map_, current_route, traffic_light_id_lookup_, and upcoming_intersection_ids_.

◆ pubTCMACK()
| void carma_wm_ctrl::WMBroadcaster::pubTCMACK | ( | j2735_v2x_msgs::msg::Id64b | tcm_req_id, |
| uint16_t | msgnum, | ||
| int | ack_status, | ||
| const std::string & | ack_reason | ||
| ) |
Construct TCM acknowledgement object and populate it with params. Publish the object for a configured number of times.
Definition at line 2363 of file WMBroadcaster.cpp.
References ack_pub_times_, geofence_ack_strategy_, process_bag::i, carma_wm_ctrl::GeofenceScheduler::now(), scheduler_, tcm_ack_pub_, and vehicle_id_.
Referenced by geofenceCallback().


◆ removeGeofence()
| void carma_wm_ctrl::WMBroadcaster::removeGeofence | ( | std::shared_ptr< Geofence > | gf_ptr | ) |
Removes a geofence from the current map and publishes the ROS msg.
Definition at line 1618 of file WMBroadcaster.cpp.
References active_geofence_llt_ids_, current_map_, current_map_version_, current_routing_graph_, map_mutex_, map_update_pub_, participant_, removeGeofenceHelper(), carma_wm::toBinMsg(), and update_count_.
Referenced by WMBroadcaster().


◆ removeGeofenceHelper()
|
private |
Definition at line 2041 of file WMBroadcaster.cpp.
References addBackRegulatoryComponent().
Referenced by removeGeofence().


◆ routeCallbackMessage()
| void carma_wm_ctrl::WMBroadcaster::routeCallbackMessage | ( | carma_planning_msgs::msg::Route::UniquePtr | route_msg | ) |
Calls controlRequestFromRoute() and publishes the TrafficControlRequest Message returned after the completed operations.
- Parameters
-
route_msg The message containing route information
Definition at line 1677 of file WMBroadcaster.cpp.
References control_msg_pub_, controlRequestFromRoute(), and current_route.
Referenced by WMBroadcaster(), and carma_wm_ctrl::WMBroadcasterNode::handle_on_activate().

◆ scheduleGeofence()
|
private |
Definition at line 1141 of file WMBroadcaster.cpp.
References carma_wm_ctrl::GeofenceScheduler::addGeofence(), carma_wm_ctrl::WorkZoneSection::REVERSE, scheduler_, work_zone_geofence_cache_, and carma_wm_ctrl::WORKZONE_TCM_REQUIRED_SIZE.
Referenced by externalMapMsgCallback(), and geofenceCallback().


◆ setConfigACKPubTimes()
| void carma_wm_ctrl::WMBroadcaster::setConfigACKPubTimes | ( | int | ack_pub_times | ) |
Sets the TCM Acknowledgement publish times.
- Parameters
-
ack_pub_times the number of times it publishes TCM Acknowledgement
Definition at line 1242 of file WMBroadcaster.cpp.
References ack_pub_times_.
◆ setConfigSpeedLimit()
| void carma_wm_ctrl::WMBroadcaster::setConfigSpeedLimit | ( | double | cL | ) |
Sets the configured speed limit.
Definition at line 1232 of file WMBroadcaster.cpp.
References config_limit.
◆ setConfigVehicleId()
| void carma_wm_ctrl::WMBroadcaster::setConfigVehicleId | ( | const std::string & | vehicle_id | ) |
Retrieve the vehicle ID from global vehicle parameters, and set instance memeber vehicle id.
- Parameters
-
vehicle_id Vehicle ID from UniqueVehicleParams.yaml
Definition at line 1238 of file WMBroadcaster.cpp.
References vehicle_id_.
◆ setErrorDistance()
| void carma_wm_ctrl::WMBroadcaster::setErrorDistance | ( | double | error_distance | ) |
Definition at line 602 of file WMBroadcaster.cpp.
References error_distance_.
◆ setIntersectionCoordCorrection()
| void carma_wm_ctrl::WMBroadcaster::setIntersectionCoordCorrection | ( | const std::vector< int64_t > & | intersection_ids_for_correction, |
| const std::vector< double > & | intersection_correction | ||
| ) |
Sets the coordinate correction for intersection.
- Parameters
-
list of intersection_ids corresponding to every two elements in correction list list of intersection coord correction parameters in double in every 2 elements: delta_x, delta_y
Definition at line 1217 of file WMBroadcaster.cpp.
References process_bag::i, and sim_.
◆ setMaxLaneWidth()
| void carma_wm_ctrl::WMBroadcaster::setMaxLaneWidth | ( | double | max_lane_width | ) |
Sets the max lane width in meters. Geofence points are associated to a lanelet if they are within this distance to a lanelet as geofence points are guaranteed to apply to a single lane.
Definition at line 1209 of file WMBroadcaster.cpp.
References max_lane_width_, and sim_.
◆ setTCRBoundBoxExpansionMeters()
| void carma_wm_ctrl::WMBroadcaster::setTCRBoundBoxExpansionMeters | ( | double | tcr_bbox_expansion_meters | ) |
Sets much more bigger the TCR bounding box should be in addition to the route's original bounding box. This helps avoid certain situations where the box's angle might prevent carma-cloud from generating TCM.
Definition at line 1672 of file WMBroadcaster.cpp.
References tcr_bbox_expansion_meters_.
◆ setVehicleParticipationType()
| void carma_wm_ctrl::WMBroadcaster::setVehicleParticipationType | ( | std::string | participant | ) |
Set the Vehicle Participation Type.
- Parameters
-
participant vehicle participation type
Definition at line 1246 of file WMBroadcaster.cpp.
References participant_.
◆ setVisualizationInfo()
| void carma_wm_ctrl::WMBroadcaster::setVisualizationInfo | ( | const std::string & | tim_icon_path, |
| double | tim_icon_scale | ||
| ) |
Set the RVIZ visualization information.
- Parameters
-
tim_icon_path icon path for tim icon (police car) tim_icon_scale icon scale for tim icon
Definition at line 1256 of file WMBroadcaster.cpp.
References tim_icon_path_, and tim_icon_scale_.
◆ shouldChangeControlLine()
|
private |
This is a helper function that returns true if the provided regem is marked to be changed by the geofence as there are usually multiple passing control lines are in the lanelet.
- Parameters
-
geofence_msg The ROS msg that contains geofence information el The LaneletOrArea that houses the regem regem The regulatoryElement that needs to be checked NOTE: Currently this function only works on lanelets. It returns true if the regem is not passingControlLine or if the pcl should be changed.
Definition at line 1367 of file WMBroadcaster.cpp.
References current_map_.
Referenced by addBackRegulatoryComponent(), and addRegulatoryComponent().

◆ shouldChangeTrafficSignal()
|
private |
This is a helper function that returns true if signal in the lanelet should be changed according to the records of signalizer intersection manager Used in managing multiple signal_groups in a single entry lanelet for example.
- Parameters
-
el The LaneletOrArea that houses the regem regem The regulatoryElement that needs to be checked sim The signalized intersection manager that has records regems and corresponding lanelets NOTE: Currently this function only works on lanelets. It returns true if the regem is not CarmaTrafficSignal or if the signal should be changed.
Definition at line 1398 of file WMBroadcaster.cpp.
References current_map_, and sim_.
Referenced by addRegulatoryComponent().

◆ splitLaneletWithPoint()
| std::vector< lanelet::Lanelet > carma_wm_ctrl::WMBroadcaster::splitLaneletWithPoint | ( | const std::vector< lanelet::BasicPoint2d > & | input_pts, |
| const lanelet::Lanelet & | input_llt, | ||
| double | error_distance | ||
| ) |
Split given lanelet with same proportion as the given points' downtrack relative to the lanelet. Newly created lanelet will have old regulatory elements copied into each of them. From the front and back boundaries, it is deemed not necessary to split if the ratios are within error_distance from either of it. For example, if front and back points of 3 points given are both within error_distance, only middle point will be used to split into 2 lanelets. It will return duplicate of old lanelet (with different id) if no splitting was done.
- Parameters
-
input_pts Points whose downtrack ratio relative to given lanelet will be used to split the lanelet input_llt A lanelet to split error_distance if within this distance (in meters) the point will be ignored
- Returns
- lanelets split form original one. lanelets sorted from front to back.
- Exceptions
-
InvalidObjectStateError if no map is available. NOTE: this is requried to return mutable objects.
Definition at line 762 of file WMBroadcaster.cpp.
References carma_wm::TrackPos::downtrack, splitLaneletWithRatio(), and carma_wm::geometry::trackPos().
Referenced by preprocessWorkzoneGeometry().


◆ splitLaneletWithRatio()
| std::vector< lanelet::Lanelet > carma_wm_ctrl::WMBroadcaster::splitLaneletWithRatio | ( | std::vector< double > | ratios, |
| lanelet::Lanelet | input_lanelet, | ||
| double | error_distance | ||
| ) | const |
Split given lanelet with given downtrack ratios relative to the lanelet. Newly created lanelet will have old regulatory elements copied into each of them. From the front and back boundaries, it is deemed not necessary to split if the ratios are within error_distance from either of it. For example, if front and back points of 3 ratios given are both within error_distance, only middle ratio will be used to split, so 2 lanelets will be returned. It will return duplicate of old lanelet (with different id) if no splitting was done.
- Parameters
-
ratios Ratios relative to given lanelet will be used to split the lanelet input_llt A lanelet to split error_distance if within this distance (in meters) the ratio will be ignored as it is too small
- Returns
- parallel_llts return lanelets split form original one. lanelets sorted from front to back.
- Exceptions
-
InvalidObjectStateError if no map is available. NOTE: this is requried to return mutable objects.
Definition at line 804 of file WMBroadcaster.cpp.
References current_map_, and process_bag::i.
Referenced by splitLaneletWithPoint(), and splitOppositeLaneletWithPoint().

◆ splitOppositeLaneletWithPoint()
| lanelet::Lanelets carma_wm_ctrl::WMBroadcaster::splitOppositeLaneletWithPoint | ( | std::shared_ptr< std::vector< lanelet::Lanelet > > | opposite_llts, |
| const lanelet::BasicPoint2d & | input_pt, | ||
| const lanelet::Lanelet & | input_llt, | ||
| double | error_distance | ||
| ) |
Split given lanelet's adjacent, OPPOSITE lanelet with same proportion as the given point's downtrack relative to the lanelet. Newly created lanelet will have old regulatory elements copied into each of them. From the front and back boundaries, it is deemed not necessary to split if the ratios are within error_distance from either of it. It will return duplicate of old lanelet (with different id) if no splitting was done.
- Parameters
-
opposite_llts return lanelets split form original one. lanelets sorted from front to back. input_pt A point whose downtrack ratio relative to given lanelet will be used to split the lanelet input_llt A lanelet to split error_distance if within this distance (in meters) the point will be ignored
- Returns
- return original opposite lanelet(s if overlapping)
- Exceptions
-
InvalidObjectStateError if no map is available. NOTE: this is requried to return mutable objects. NOTE: Opposite lanelet doesn't have to share points with current lanelet
Definition at line 783 of file WMBroadcaster.cpp.
References current_map_, carma_wm::TrackPos::downtrack, carma_wm::query::nonConnectedAdjacentLeft(), splitLaneletWithRatio(), and carma_wm::geometry::trackPos().
Referenced by createWorkzoneGeometry().

◆ updateUpcomingSGIntersectionIds()
| void carma_wm_ctrl::WMBroadcaster::updateUpcomingSGIntersectionIds | ( | ) |
populate upcoming_intersection_ids_ from local traffic lanelet ids
Definition at line 2298 of file WMBroadcaster.cpp.
References current_map_, current_route, sim_, and upcoming_intersection_ids_.
Member Data Documentation
◆ ack_pub_times_
|
private |
Definition at line 493 of file WMBroadcaster.hpp.
Referenced by pubTCMACK(), and setConfigACKPubTimes().
◆ active_geofence_llt_ids_
|
private |
Definition at line 431 of file WMBroadcaster.hpp.
Referenced by addGeofence(), checkActiveGeofenceLogic(), distToNearestActiveGeofence(), and removeGeofence().
◆ active_pub_
|
private |
Definition at line 460 of file WMBroadcaster.hpp.
Referenced by currentLocationCallback().
◆ base_map_
|
private |
Definition at line 448 of file WMBroadcaster.hpp.
Referenced by baseMapCallback().
◆ base_map_georef_
|
private |
Definition at line 463 of file WMBroadcaster.hpp.
Referenced by controlRequestFromRoute(), geoReferenceCallback(), and getPointsInLocalFrame().
◆ cached_maps_
|
private |
Definition at line 455 of file WMBroadcaster.hpp.
◆ checked_geofence_ids_
|
private |
Definition at line 453 of file WMBroadcaster.hpp.
Referenced by geofenceCallback().
◆ config_limit
|
private |
Definition at line 451 of file WMBroadcaster.hpp.
Referenced by baseMapCallback(), geofenceFromMsg(), and setConfigSpeedLimit().
◆ control_msg_pub_
|
private |
Definition at line 459 of file WMBroadcaster.hpp.
Referenced by routeCallbackMessage().
◆ current_map_
|
private |
Definition at line 449 of file WMBroadcaster.hpp.
Referenced by addBackRegulatoryComponent(), addGeofence(), addGeofenceHelper(), addRegulatoryComponent(), baseMapCallback(), checkActiveGeofenceLogic(), controlRequestFromRoute(), createWorkzoneGeometry(), currentLocationCallback(), distToNearestActiveGeofence(), externalMapMsgCallback(), geofenceFromMapMsg(), geofenceFromMsg(), getAffectedLaneletOrAreas(), getPointsInLocalFrame(), preprocessWorkzoneGeometry(), publishLightId(), removeGeofence(), shouldChangeControlLine(), shouldChangeTrafficSignal(), splitLaneletWithRatio(), splitOppositeLaneletWithPoint(), and updateUpcomingSGIntersectionIds().
◆ current_map_version_
|
private |
Definition at line 472 of file WMBroadcaster.hpp.
Referenced by addGeofence(), baseMapCallback(), and removeGeofence().
◆ current_route
|
private |
Definition at line 476 of file WMBroadcaster.hpp.
Referenced by getRoute(), publishLightId(), routeCallbackMessage(), and updateUpcomingSGIntersectionIds().
◆ current_routing_graph_
|
private |
Definition at line 450 of file WMBroadcaster.hpp.
Referenced by addGeofence(), baseMapCallback(), geofenceFromMapMsg(), getAffectedLaneletOrAreas(), preprocessWorkzoneGeometry(), and removeGeofence().
◆ error_distance_
|
private |
Definition at line 429 of file WMBroadcaster.hpp.
Referenced by createWorkzoneGeometry(), preprocessWorkzoneGeometry(), and setErrorDistance().
◆ generated_geofence_reqids_
|
private |
Definition at line 454 of file WMBroadcaster.hpp.
Referenced by controlRequestFromRoute(), and geofenceCallback().
◆ geofence_ack_strategy_
|
private |
Definition at line 492 of file WMBroadcaster.hpp.
Referenced by pubTCMACK().
◆ j2735_map_msg_marker_array_
| visualization_msgs::msg::MarkerArray carma_wm_ctrl::WMBroadcaster::j2735_map_msg_marker_array_ |
Definition at line 424 of file WMBroadcaster.hpp.
Referenced by addGeofence().
◆ map_mutex_
|
private |
Definition at line 456 of file WMBroadcaster.hpp.
Referenced by addGeofence(), baseMapCallback(), distToNearestActiveGeofence(), geofenceCallback(), geoReferenceCallback(), and removeGeofence().
◆ map_pub_
|
private |
Definition at line 457 of file WMBroadcaster.hpp.
Referenced by baseMapCallback().
◆ map_update_message_queue_
|
private |
Queue which stores the map updates applied to the current map version as a sequence of diffs This queue is implemented as a vector because it gets reused by each new subscriber connection NOTE: This queue should be cleared each time the current_map_version changes
Definition at line 482 of file WMBroadcaster.hpp.
◆ map_update_pub_
|
private |
Definition at line 458 of file WMBroadcaster.hpp.
Referenced by addGeofence(), and removeGeofence().
◆ max_lane_width_
|
private |
Definition at line 464 of file WMBroadcaster.hpp.
Referenced by getAffectedLaneletOrAreas(), and setMaxLaneWidth().
◆ participant_
|
private |
Definition at line 452 of file WMBroadcaster.hpp.
Referenced by addGeofence(), baseMapCallback(), getVehicleParticipationType(), removeGeofence(), and setVehicleParticipationType().
◆ route_path_
|
private |
Definition at line 430 of file WMBroadcaster.hpp.
Referenced by controlRequestFromRoute(), and distToNearestActiveGeofence().
◆ scheduler_
|
private |
Definition at line 461 of file WMBroadcaster.hpp.
Referenced by WMBroadcaster(), addScheduleFromMsg(), controlRequestFromRoute(), pubTCMACK(), and scheduleGeofence().
◆ sim_
|
private |
Definition at line 486 of file WMBroadcaster.hpp.
Referenced by addGeofence(), addRegulatoryComponent(), externalMapMsgCallback(), geofenceFromMapMsg(), geoReferenceCallback(), setIntersectionCoordCorrection(), setMaxLaneWidth(), shouldChangeTrafficSignal(), and updateUpcomingSGIntersectionIds().
◆ tcm_ack_pub_
|
private |
Definition at line 462 of file WMBroadcaster.hpp.
Referenced by pubTCMACK().
◆ tcm_marker_array_
| visualization_msgs::msg::MarkerArray carma_wm_ctrl::WMBroadcaster::tcm_marker_array_ |
Definition at line 423 of file WMBroadcaster.hpp.
Referenced by addGeofence().
◆ tcr_bbox_expansion_meters_
|
private |
Definition at line 465 of file WMBroadcaster.hpp.
Referenced by controlRequestFromRoute(), and setTCRBoundBoxExpansionMeters().
◆ tcr_polygon_
| carma_v2x_msgs::msg::TrafficControlRequestPolygon carma_wm_ctrl::WMBroadcaster::tcr_polygon_ |
Definition at line 425 of file WMBroadcaster.hpp.
Referenced by controlRequestFromRoute().
◆ tim_icon_path_
|
private |
Definition at line 473 of file WMBroadcaster.hpp.
Referenced by composeVisualizerMarkerFromPts(), and setVisualizationInfo().
◆ tim_icon_scale_
|
private |
Definition at line 474 of file WMBroadcaster.hpp.
Referenced by composeVisualizerMarkerFromPts(), and setVisualizationInfo().
◆ traffic_light_id_lookup_
|
private |
Definition at line 433 of file WMBroadcaster.hpp.
Referenced by addGeofenceHelper(), convertLightIdToInterGroupId(), and publishLightId().
◆ upcoming_intersection_ids_
| std_msgs::msg::Int32MultiArray carma_wm_ctrl::WMBroadcaster::upcoming_intersection_ids_ |
Definition at line 426 of file WMBroadcaster.hpp.
Referenced by publishLightId(), and updateUpcomingSGIntersectionIds().
◆ update_count_
|
private |
Definition at line 484 of file WMBroadcaster.hpp.
Referenced by addGeofence(), and removeGeofence().
◆ vehicle_id_
|
private |
Definition at line 494 of file WMBroadcaster.hpp.
Referenced by pubTCMACK(), and setConfigVehicleId().
◆ work_zone_geofence_cache_
|
private |
Definition at line 432 of file WMBroadcaster.hpp.
Referenced by addGeofence(), geofenceFromMsg(), and scheduleGeofence().
◆ workzone_geometry_published_
|
private |
Definition at line 467 of file WMBroadcaster.hpp.
◆ workzone_remaining_msgs_
|
private |
Definition at line 466 of file WMBroadcaster.hpp.
The documentation for this class was generated from the following files:
- carma_wm_ctrl/include/carma_wm_ctrl/WMBroadcaster.hpp
- carma_wm_ctrl/src/WMBroadcaster.cpp