Node which subcribes to and input topic, transforms the data into a new frame and republishes it onto an output topic. More...
#include <frame_transformer_node.hpp>
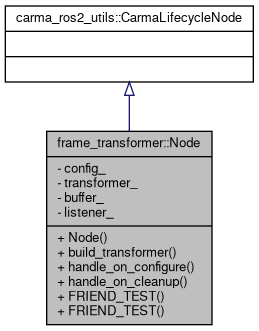
Public Member Functions | |
| Node (const rclcpp::NodeOptions &) | |
| Node constructor. More... | |
| std::unique_ptr< TransformerBase > | build_transformer () |
| Factory method which returns an initialized pointer to a TransformerBase. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_cleanup (const rclcpp_lifecycle::State &) |
| FRIEND_TEST (frame_transformer_test, transform_test) | |
| FRIEND_TEST (frame_transformer_test, point_cloud_transform_test) | |
Private Attributes | |
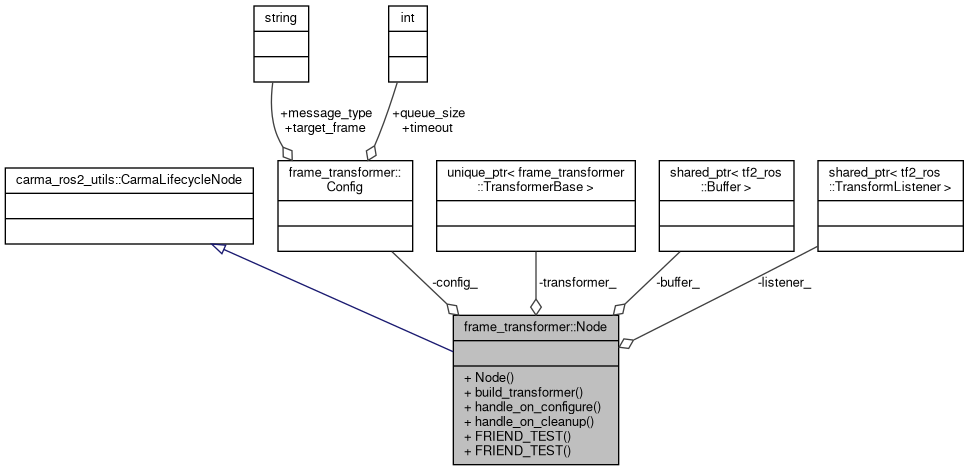
| Config | config_ |
| Node configuration. More... | |
| std::unique_ptr< TransformerBase > | transformer_ |
| Pointer to a transformer which will setup its own pub/subs to perform the transformation More... | |
| std::shared_ptr< tf2_ros::Buffer > | buffer_ |
| tf2 Buffer to store transforms broadcast on the system More... | |
| std::shared_ptr< tf2_ros::TransformListener > | listener_ |
| tf2 Listener to subscribe to system transform broadcasts More... | |
Detailed Description
Node which subcribes to and input topic, transforms the data into a new frame and republishes it onto an output topic.
Definition at line 36 of file frame_transformer_node.hpp.
Constructor & Destructor Documentation
◆ Node()
|
explicit |
Node constructor.
Definition at line 23 of file frame_transformer_node.cpp.
References config_, frame_transformer::Config::message_type, frame_transformer::Config::queue_size, frame_transformer::Config::target_frame, and frame_transformer::Config::timeout.
Member Function Documentation
◆ build_transformer()
| std::unique_ptr< TransformerBase > frame_transformer::Node::build_transformer | ( | ) |
Factory method which returns an initialized pointer to a TransformerBase.
ASSUMPTION: this->config_ and this->buffer_ are already initialized
- Returns
- Initialized pointer to a TransformBase object which contains the required pub/sub for transformations to occur
Definition at line 36 of file frame_transformer_node.cpp.
References buffer_, config_, frame_transformer::Config::message_type, and create_two_lane_map::type.
Referenced by handle_on_configure().
◆ FRIEND_TEST() [1/2]
| frame_transformer::Node::FRIEND_TEST | ( | frame_transformer_test | , |
| point_cloud_transform_test | |||
| ) |
◆ FRIEND_TEST() [2/2]
| frame_transformer::Node::FRIEND_TEST | ( | frame_transformer_test | , |
| transform_test | |||
| ) |
◆ handle_on_cleanup()
| carma_ros2_utils::CallbackReturn frame_transformer::Node::handle_on_cleanup | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 113 of file frame_transformer_node.cpp.
References buffer_, listener_, and transformer_.
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn frame_transformer::Node::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 75 of file frame_transformer_node.cpp.
References buffer_, build_transformer(), config_, listener_, frame_transformer::Config::message_type, frame_transformer::Config::queue_size, frame_transformer::Config::target_frame, frame_transformer::Config::timeout, and transformer_.
Member Data Documentation
◆ buffer_
|
private |
tf2 Buffer to store transforms broadcast on the system
Definition at line 48 of file frame_transformer_node.hpp.
Referenced by build_transformer(), handle_on_cleanup(), and handle_on_configure().
◆ config_
|
private |
Node configuration.
Definition at line 42 of file frame_transformer_node.hpp.
Referenced by Node(), build_transformer(), and handle_on_configure().
◆ listener_
|
private |
tf2 Listener to subscribe to system transform broadcasts
Definition at line 51 of file frame_transformer_node.hpp.
Referenced by handle_on_cleanup(), and handle_on_configure().
◆ transformer_
|
private |
Pointer to a transformer which will setup its own pub/subs to perform the transformation
Definition at line 45 of file frame_transformer_node.hpp.
Referenced by handle_on_cleanup(), and handle_on_configure().
The documentation for this class was generated from the following files:
- frame_transformer/include/frame_transformer/frame_transformer_node.hpp
- frame_transformer/src/frame_transformer_node.cpp