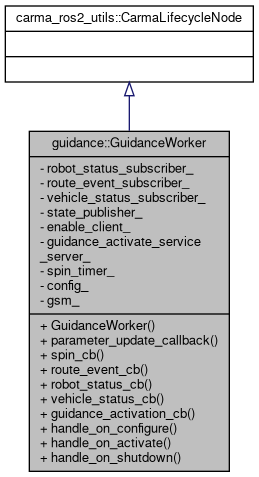
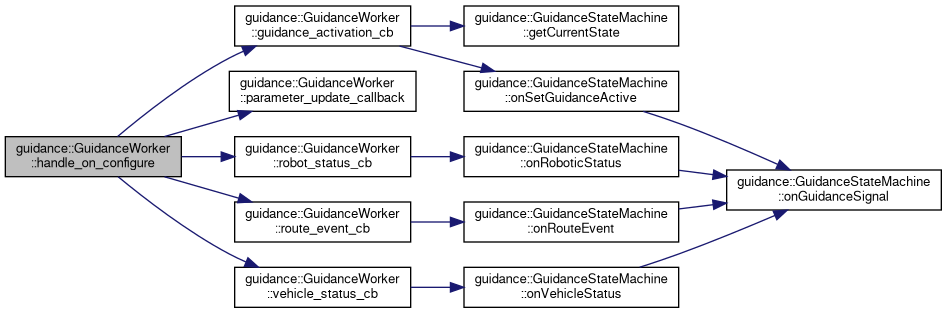
Worker class for the Guidance node. More...
#include <guidance_worker.hpp>
Public Member Functions | |
| GuidanceWorker (const rclcpp::NodeOptions &) | |
| GuidanceWorker constructor. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| Callback for dynamic parameter updates. More... | |
| bool | spin_cb () |
| Timer callback. More... | |
| void | route_event_cb (carma_planning_msgs::msg::RouteEvent::UniquePtr msg) |
| Callback for route event messages. More... | |
| void | robot_status_cb (carma_driver_msgs::msg::RobotEnabled::UniquePtr msg) |
| Callback for robot enabled messages. More... | |
| void | vehicle_status_cb (const autoware_msgs::msg::VehicleStatus::UniquePtr msg) |
| Callback for vehicle status messages. More... | |
| bool | guidance_activation_cb (const std::shared_ptr< rmw_request_id_t >, const std::shared_ptr< carma_planning_msgs::srv::SetGuidanceActive::Request > req, std::shared_ptr< carma_planning_msgs::srv::SetGuidanceActive::Response > resp) |
| Set_guidance_active service callback. User can attempt to activate the guidance system by calling this service. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &prev_state) |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_shutdown (const rclcpp_lifecycle::State &prev_state) |
Private Attributes | |
| carma_ros2_utils::SubPtr< carma_driver_msgs::msg::RobotEnabled > | robot_status_subscriber_ |
| carma_ros2_utils::SubPtr< carma_planning_msgs::msg::RouteEvent > | route_event_subscriber_ |
| carma_ros2_utils::SubPtr< autoware_msgs::msg::VehicleStatus > | vehicle_status_subscriber_ |
| carma_ros2_utils::PubPtr< carma_planning_msgs::msg::GuidanceState > | state_publisher_ |
| carma_ros2_utils::ClientPtr< carma_driver_msgs::srv::SetEnableRobotic > | enable_client_ |
| carma_ros2_utils::ServicePtr< carma_planning_msgs::srv::SetGuidanceActive > | guidance_activate_service_server_ |
| rclcpp::TimerBase::SharedPtr | spin_timer_ |
| Config | config_ |
| GuidanceStateMachine | gsm_ |
Detailed Description
Worker class for the Guidance node.
Definition at line 39 of file guidance_worker.hpp.
Constructor & Destructor Documentation
◆ GuidanceWorker()
|
explicit |
GuidanceWorker constructor.
Definition at line 22 of file guidance_worker.cpp.
References config_, and guidance::Config::spin_rate_hz.
Member Function Documentation
◆ guidance_activation_cb()
| bool guidance::GuidanceWorker::guidance_activation_cb | ( | const std::shared_ptr< rmw_request_id_t > | , |
| const std::shared_ptr< carma_planning_msgs::srv::SetGuidanceActive::Request > | req, | ||
| std::shared_ptr< carma_planning_msgs::srv::SetGuidanceActive::Response > | resp | ||
| ) |
Set_guidance_active service callback. User can attempt to activate the guidance system by calling this service.
- Parameters
-
req A carma_planning_msgs::srv::SetGuidanceActive::Request msg resp A carma_planning_msgs::srv::SetGuidanceActive::Response msg
Definition at line 102 of file guidance_worker.cpp.
References guidance::GuidanceStateMachine::ACTIVE, enable_client_, guidance::GuidanceStateMachine::getCurrentState(), gsm_, and guidance::GuidanceStateMachine::onSetGuidanceActive().
Referenced by handle_on_configure().


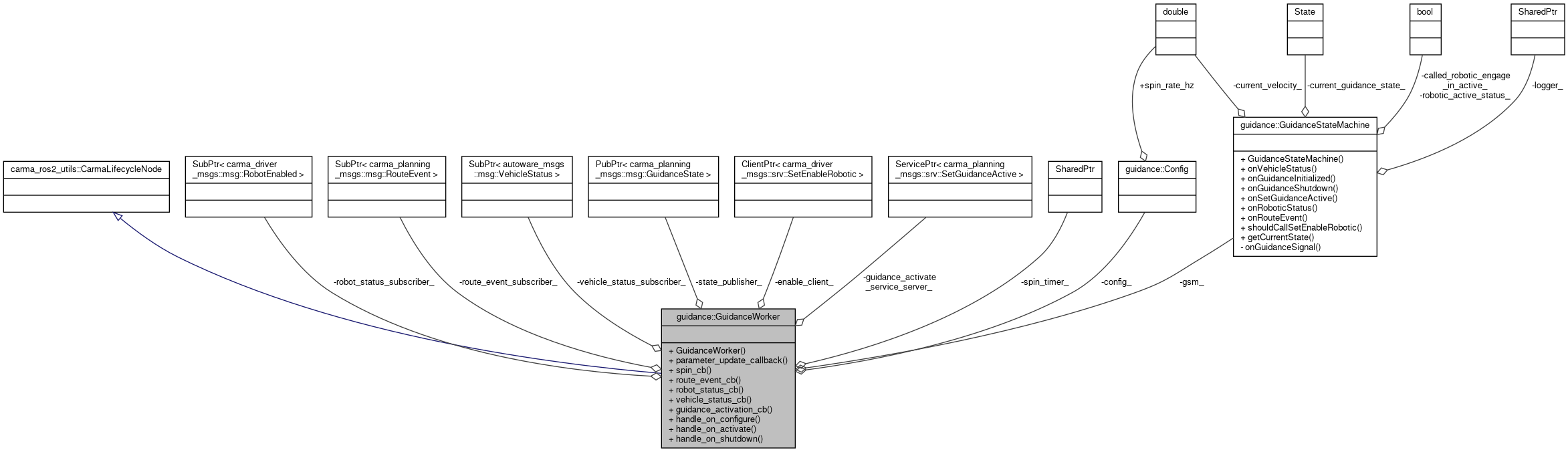
◆ handle_on_activate()
| carma_ros2_utils::CallbackReturn guidance::GuidanceWorker::handle_on_activate | ( | const rclcpp_lifecycle::State & | prev_state | ) |
Definition at line 81 of file guidance_worker.cpp.
References config_, gsm_, create_two_lane_map::int, guidance::GuidanceStateMachine::onGuidanceInitialized(), spin_cb(), guidance::Config::spin_rate_hz, and spin_timer_.
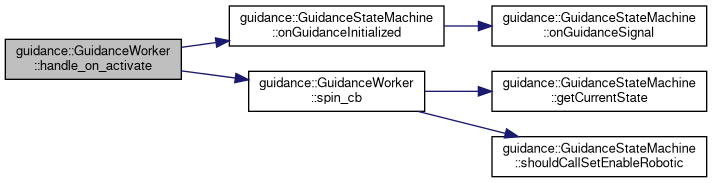
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn guidance::GuidanceWorker::handle_on_configure | ( | const rclcpp_lifecycle::State & | prev_state | ) |
Definition at line 44 of file guidance_worker.cpp.
References config_, enable_client_, guidance_activate_service_server_, guidance_activation_cb(), parameter_update_callback(), robot_status_cb(), robot_status_subscriber_, route_event_cb(), route_event_subscriber_, guidance::Config::spin_rate_hz, state_publisher_, vehicle_status_cb(), and vehicle_status_subscriber_.
◆ handle_on_shutdown()
| carma_ros2_utils::CallbackReturn guidance::GuidanceWorker::handle_on_shutdown | ( | const rclcpp_lifecycle::State & | prev_state | ) |
Definition at line 96 of file guidance_worker.cpp.
References gsm_, and guidance::GuidanceStateMachine::onGuidanceShutdown().

◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult guidance::GuidanceWorker::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
Callback for dynamic parameter updates.
Definition at line 33 of file guidance_worker.cpp.
References config_, and guidance::Config::spin_rate_hz.
Referenced by handle_on_configure().

◆ robot_status_cb()
| void guidance::GuidanceWorker::robot_status_cb | ( | carma_driver_msgs::msg::RobotEnabled::UniquePtr | msg | ) |
Callback for robot enabled messages.
- Parameters
-
msg Latest robot enabled message
Definition at line 138 of file guidance_worker.cpp.
References gsm_, and guidance::GuidanceStateMachine::onRoboticStatus().
Referenced by handle_on_configure().


◆ route_event_cb()
| void guidance::GuidanceWorker::route_event_cb | ( | carma_planning_msgs::msg::RouteEvent::UniquePtr | msg | ) |
Callback for route event messages.
- Parameters
-
msg Latest route event message
Definition at line 133 of file guidance_worker.cpp.
References gsm_, and guidance::GuidanceStateMachine::onRouteEvent().
Referenced by handle_on_configure().


◆ spin_cb()
| bool guidance::GuidanceWorker::spin_cb | ( | ) |
Timer callback.
Definition at line 119 of file guidance_worker.cpp.
References enable_client_, guidance::GuidanceStateMachine::getCurrentState(), gsm_, guidance::GuidanceStateMachine::shouldCallSetEnableRobotic(), and state_publisher_.
Referenced by handle_on_activate().

◆ vehicle_status_cb()
| void guidance::GuidanceWorker::vehicle_status_cb | ( | const autoware_msgs::msg::VehicleStatus::UniquePtr | msg | ) |
Callback for vehicle status messages.
- Parameters
-
msg Latest vehicle status message
Definition at line 143 of file guidance_worker.cpp.
References gsm_, and guidance::GuidanceStateMachine::onVehicleStatus().
Referenced by handle_on_configure().


Member Data Documentation
◆ config_
|
private |
Definition at line 61 of file guidance_worker.hpp.
Referenced by GuidanceWorker(), handle_on_activate(), handle_on_configure(), and parameter_update_callback().
◆ enable_client_
|
private |
Definition at line 52 of file guidance_worker.hpp.
Referenced by guidance_activation_cb(), handle_on_configure(), and spin_cb().
◆ gsm_
|
private |
Definition at line 64 of file guidance_worker.hpp.
Referenced by guidance_activation_cb(), handle_on_activate(), handle_on_shutdown(), robot_status_cb(), route_event_cb(), spin_cb(), and vehicle_status_cb().
◆ guidance_activate_service_server_
|
private |
Definition at line 55 of file guidance_worker.hpp.
Referenced by handle_on_configure().
◆ robot_status_subscriber_
|
private |
Definition at line 44 of file guidance_worker.hpp.
Referenced by handle_on_configure().
◆ route_event_subscriber_
|
private |
Definition at line 45 of file guidance_worker.hpp.
Referenced by handle_on_configure().
◆ spin_timer_
|
private |
Definition at line 58 of file guidance_worker.hpp.
Referenced by handle_on_activate().
◆ state_publisher_
|
private |
Definition at line 49 of file guidance_worker.hpp.
Referenced by handle_on_configure(), and spin_cb().
◆ vehicle_status_subscriber_
|
private |
Definition at line 46 of file guidance_worker.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- guidance/include/guidance/guidance_worker.hpp
- guidance/src/guidance_worker.cpp