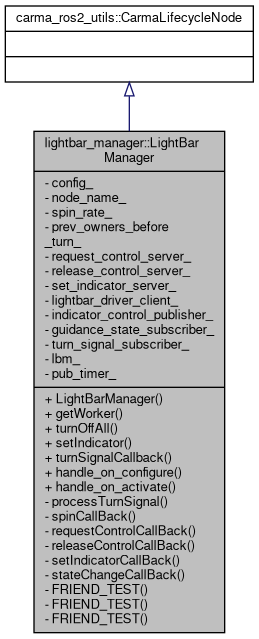
#include <lightbar_manager_node.hpp>
Public Member Functions | |
| LightBarManager (const rclcpp::NodeOptions &) | |
| std::shared_ptr< LightBarManagerWorker > | getWorker () |
| Get ptr to lightbar_manager_worker (for ease of unit testing) More... | |
| void | turnOffAll () |
| Miscellaneous function that forces the state to disengaged and turn off all indicators. Used in special demo cases as well as when carma is disengaged. More... | |
| int | setIndicator (LightBarIndicator ind, IndicatorStatus ind_status, const std::string &requester_name) |
| Try to turn the given indicator ON or OFF (comm with hardware) upon the given component's request. More... | |
| void | turnSignalCallback (automotive_platform_msgs::msg::TurnSignalCommand::UniquePtr msg_ptr) |
| Callback function for turning signal. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_deactivate (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_cleanup (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_error (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_shutdown (const rclcpp_lifecycle::State &) |
Private Member Functions | |
| void | processTurnSignal (const automotive_platform_msgs::msg::TurnSignalCommand &msg) |
| Turn signal callback function helper. More... | |
| bool | spinCallBack () |
| bool | requestControlCallBack (const std::shared_ptr< rmw_request_id_t >, const std::shared_ptr< carma_msgs::srv::RequestIndicatorControl::Request > req, std::shared_ptr< carma_msgs::srv::RequestIndicatorControl::Response > resp) |
| bool | releaseControlCallBack (const std::shared_ptr< rmw_request_id_t >, const std::shared_ptr< carma_msgs::srv::ReleaseIndicatorControl::Request > req, std::shared_ptr< carma_msgs::srv::ReleaseIndicatorControl::Response > resp) |
| bool | setIndicatorCallBack (const std::shared_ptr< rmw_request_id_t >, const std::shared_ptr< carma_driver_msgs::srv::SetLightBarIndicator::Request > req, std::shared_ptr< carma_driver_msgs::srv::SetLightBarIndicator::Response > resp) |
| void | stateChangeCallBack (carma_planning_msgs::msg::GuidanceState::UniquePtr msg_ptr) |
| FRIEND_TEST (LightBarManagerNodeTest, testSetIndicator) | |
| FRIEND_TEST (LightBarManagerNodeTest, testTurnOffAll) | |
| FRIEND_TEST (LightBarManagerNodeTest, testTurnSignalCallback) | |
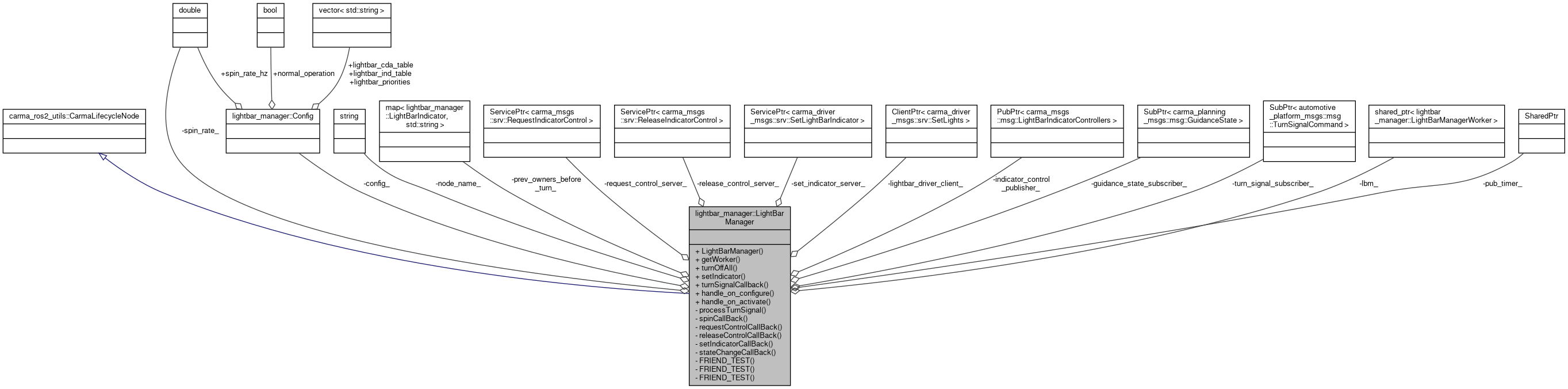
Private Attributes | |
| Config | config_ |
| std::string | node_name_ = "lightbar_manager" |
| double | spin_rate_ = 10.0 |
| std::map< lightbar_manager::LightBarIndicator, std::string > | prev_owners_before_turn_ |
| carma_ros2_utils::ServicePtr< carma_msgs::srv::RequestIndicatorControl > | request_control_server_ |
| carma_ros2_utils::ServicePtr< carma_msgs::srv::ReleaseIndicatorControl > | release_control_server_ |
| carma_ros2_utils::ServicePtr< carma_driver_msgs::srv::SetLightBarIndicator > | set_indicator_server_ |
| carma_ros2_utils::ClientPtr< carma_driver_msgs::srv::SetLights > | lightbar_driver_client_ |
| carma_ros2_utils::PubPtr< carma_msgs::msg::LightBarIndicatorControllers > | indicator_control_publisher_ |
| carma_ros2_utils::SubPtr< carma_planning_msgs::msg::GuidanceState > | guidance_state_subscriber_ |
| carma_ros2_utils::SubPtr< automotive_platform_msgs::msg::TurnSignalCommand > | turn_signal_subscriber_ |
| std::shared_ptr< LightBarManagerWorker > | lbm_ |
| rclcpp::TimerBase::SharedPtr | pub_timer_ |
Detailed Description
Definition at line 68 of file lightbar_manager_node.hpp.
Constructor & Destructor Documentation
◆ LightBarManager()
|
explicit |
Definition at line 26 of file lightbar_manager_node.cpp.
References config_, lbm_, lightbar_manager::Config::lightbar_cda_table, lightbar_manager::Config::lightbar_ind_table, lightbar_manager::Config::lightbar_priorities, lightbar_manager::Config::normal_operation, and lightbar_manager::Config::spin_rate_hz.
Member Function Documentation
◆ FRIEND_TEST() [1/3]
|
private |
◆ FRIEND_TEST() [2/3]
|
private |
◆ FRIEND_TEST() [3/3]
|
private |
◆ getWorker()
| std::shared_ptr< LightBarManagerWorker > LightBarManager::getWorker | ( | ) |
Get ptr to lightbar_manager_worker (for ease of unit testing)
- Returns
- LightBarManagerWorker
Definition at line 357 of file lightbar_manager_node.cpp.
References lbm_.
◆ handle_on_activate()
| carma_ros2_utils::CallbackReturn LightBarManager::handle_on_activate | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 114 of file lightbar_manager_node.cpp.
References config_, pub_timer_, lightbar_manager::Config::spin_rate_hz, and spinCallBack().

◆ handle_on_cleanup()
| carma_ros2_utils::CallbackReturn LightBarManager::handle_on_cleanup | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 129 of file lightbar_manager_node.cpp.
References turnOffAll().

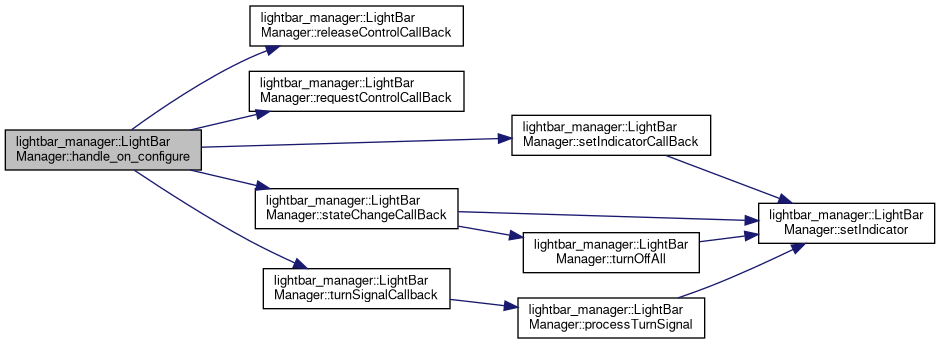
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn LightBarManager::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 38 of file lightbar_manager_node.cpp.
References config_, lightbar_manager::GREEN_FLASH, lightbar_manager::GREEN_SOLID, guidance_state_subscriber_, process_bag::i, indicator_control_publisher_, INDICATOR_COUNT, lbm_, lightbar_manager::Config::lightbar_cda_table, lightbar_driver_client_, lightbar_manager::Config::lightbar_ind_table, lightbar_manager::Config::lightbar_priorities, node_name_, lightbar_manager::Config::normal_operation, lightbar_manager::OFF, release_control_server_, releaseControlCallBack(), request_control_server_, requestControlCallBack(), set_indicator_server_, setIndicatorCallBack(), lightbar_manager::Config::spin_rate_hz, stateChangeCallBack(), turn_signal_subscriber_, and turnSignalCallback().
◆ handle_on_deactivate()
| carma_ros2_utils::CallbackReturn LightBarManager::handle_on_deactivate | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 122 of file lightbar_manager_node.cpp.
References turnOffAll().

◆ handle_on_error()
| carma_ros2_utils::CallbackReturn LightBarManager::handle_on_error | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 136 of file lightbar_manager_node.cpp.
References turnOffAll().

◆ handle_on_shutdown()
| carma_ros2_utils::CallbackReturn LightBarManager::handle_on_shutdown | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 143 of file lightbar_manager_node.cpp.
References turnOffAll().

◆ processTurnSignal()
|
private |
Turn signal callback function helper.
- Returns
Definition at line 301 of file lightbar_manager_node.cpp.
References lbm_, node_name_, lightbar_manager::OFF, lightbar_manager::ON, prev_owners_before_turn_, and setIndicator().
Referenced by turnSignalCallback().


◆ releaseControlCallBack()
|
private |
Definition at line 232 of file lightbar_manager_node.cpp.
References INDICATOR_COUNT, and lbm_.
Referenced by handle_on_configure().

◆ requestControlCallBack()
|
private |
Definition at line 180 of file lightbar_manager_node.cpp.
References INDICATOR_COUNT, and lbm_.
Referenced by handle_on_configure().

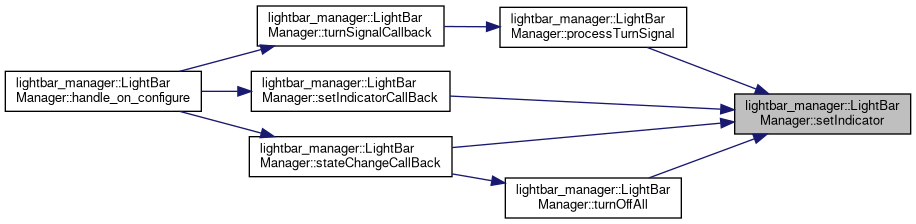
◆ setIndicator()
| int LightBarManager::setIndicator | ( | LightBarIndicator | ind, |
| IndicatorStatus | ind_status, | ||
| const std::string & | requester_name | ||
| ) |
Try to turn the given indicator ON or OFF (comm with hardware) upon the given component's request.
- Returns
- Returns the status code whether if the request was successful or not
Definition at line 362 of file lightbar_manager_node.cpp.
References INDICATOR_COUNT, lbm_, and lightbar_driver_client_.
Referenced by processTurnSignal(), setIndicatorCallBack(), stateChangeCallBack(), and turnOffAll().
◆ setIndicatorCallBack()
|
private |
Definition at line 407 of file lightbar_manager_node.cpp.
References lbm_, and setIndicator().
Referenced by handle_on_configure().


◆ spinCallBack()
|
private |
Definition at line 263 of file lightbar_manager_node.cpp.
References indicator_control_publisher_, and lbm_.
Referenced by handle_on_activate().

◆ stateChangeCallBack()
|
private |
Definition at line 269 of file lightbar_manager_node.cpp.
References lightbar_manager::ACTIVE, lightbar_manager::DISENGAGED, lightbar_manager::ENGAGED, lightbar_manager::GREEN_FLASH, lightbar_manager::GREEN_SOLID, lbm_, node_name_, lightbar_manager::ON, setIndicator(), and turnOffAll().
Referenced by handle_on_configure().


◆ turnOffAll()
| void LightBarManager::turnOffAll | ( | ) |
Miscellaneous function that forces the state to disengaged and turn off all indicators. Used in special demo cases as well as when carma is disengaged.
Definition at line 150 of file lightbar_manager_node.cpp.
References lightbar_manager::GREEN_FLASH, lightbar_manager::GREEN_SOLID, lbm_, node_name_, lightbar_manager::OFF, and setIndicator().
Referenced by handle_on_cleanup(), handle_on_deactivate(), handle_on_error(), handle_on_shutdown(), and stateChangeCallBack().


◆ turnSignalCallback()
| void LightBarManager::turnSignalCallback | ( | automotive_platform_msgs::msg::TurnSignalCommand::UniquePtr | msg_ptr | ) |
Callback function for turning signal.
- Returns
Definition at line 296 of file lightbar_manager_node.cpp.
References processTurnSignal().
Referenced by handle_on_configure().


Member Data Documentation
◆ config_
|
private |
Definition at line 115 of file lightbar_manager_node.hpp.
Referenced by LightBarManager(), handle_on_activate(), and handle_on_configure().
◆ guidance_state_subscriber_
|
private |
Definition at line 153 of file lightbar_manager_node.hpp.
Referenced by handle_on_configure().
◆ indicator_control_publisher_
|
private |
Definition at line 150 of file lightbar_manager_node.hpp.
Referenced by handle_on_configure(), and spinCallBack().
◆ lbm_
|
private |
Definition at line 157 of file lightbar_manager_node.hpp.
Referenced by LightBarManager(), getWorker(), handle_on_configure(), processTurnSignal(), releaseControlCallBack(), requestControlCallBack(), setIndicator(), setIndicatorCallBack(), spinCallBack(), stateChangeCallBack(), and turnOffAll().
◆ lightbar_driver_client_
|
private |
Definition at line 147 of file lightbar_manager_node.hpp.
Referenced by handle_on_configure(), and setIndicator().
◆ node_name_
|
private |
Definition at line 124 of file lightbar_manager_node.hpp.
Referenced by handle_on_configure(), processTurnSignal(), stateChangeCallBack(), and turnOffAll().
◆ prev_owners_before_turn_
|
private |
Definition at line 126 of file lightbar_manager_node.hpp.
Referenced by processTurnSignal().
◆ pub_timer_
|
private |
Definition at line 159 of file lightbar_manager_node.hpp.
Referenced by handle_on_activate().
◆ release_control_server_
|
private |
Definition at line 145 of file lightbar_manager_node.hpp.
Referenced by handle_on_configure().
◆ request_control_server_
|
private |
Definition at line 144 of file lightbar_manager_node.hpp.
Referenced by handle_on_configure().
◆ set_indicator_server_
|
private |
Definition at line 146 of file lightbar_manager_node.hpp.
Referenced by handle_on_configure().
◆ spin_rate_
|
private |
Definition at line 125 of file lightbar_manager_node.hpp.
◆ turn_signal_subscriber_
|
private |
Definition at line 154 of file lightbar_manager_node.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- lightbar_manager/include/lightbar_manager/lightbar_manager_node.hpp
- lightbar_manager/src/lightbar_manager_node.cpp