The class responsible for publishing MobilityPath messages based on the latest trajectory plan. More...
#include <mobilitypath_publisher.hpp>
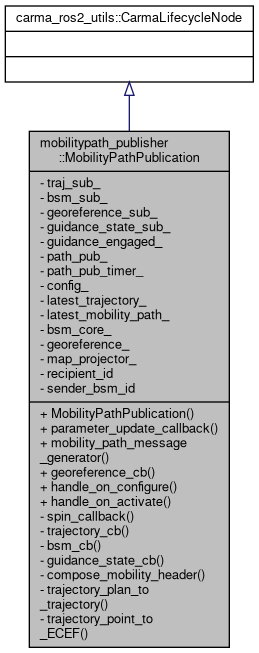
Public Member Functions | |
| MobilityPathPublication (const rclcpp::NodeOptions &) | |
| MobilityPathPublication constructor. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| Function callback for dynamic parameter updates. More... | |
| carma_v2x_msgs::msg::MobilityPath | mobility_path_message_generator (const carma_planning_msgs::msg::TrajectoryPlan &trajectory_plan) |
| Generates a MobilityPath message from a TrajectoryPlan. More... | |
| void | georeference_cb (const std_msgs::msg::String::UniquePtr msg) |
| Callback for map projection string to define lat/lon -> map conversion. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) |
Private Member Functions | |
| bool | spin_callback () |
| Spin callback, which will be called frequently based on the configured spin rate. More... | |
| void | trajectory_cb (const carma_planning_msgs::msg::TrajectoryPlan::UniquePtr msg) |
| Callback for the trajectory plan subscriber, which stores the latest trajectory plan locally and stores its corresponding MobilityPath locally. More... | |
| void | bsm_cb (const carma_v2x_msgs::msg::BSM::UniquePtr msg) |
| Callback for the BSM subscriber, which stores the BSM's BSMCoreData locally. More... | |
| void | guidance_state_cb (const carma_planning_msgs::msg::GuidanceState::UniquePtr msg) |
| Callback for the Guidance State. More... | |
| carma_v2x_msgs::msg::MobilityHeader | compose_mobility_header (uint64_t time) |
| Generates a MobilityHeader to be used for a published MobilityPath message. More... | |
| carma_v2x_msgs::msg::Trajectory | trajectory_plan_to_trajectory (const std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > &traj_points) const |
| Converts a Trajectory Plan to a (Mobility) Trajectory. More... | |
| carma_v2x_msgs::msg::LocationECEF | trajectory_point_to_ECEF (const carma_planning_msgs::msg::TrajectoryPlanPoint &traj_point) const |
| Converts Trajectory Plan Point to ECEF (accepts meters and outputs in cm) More... | |
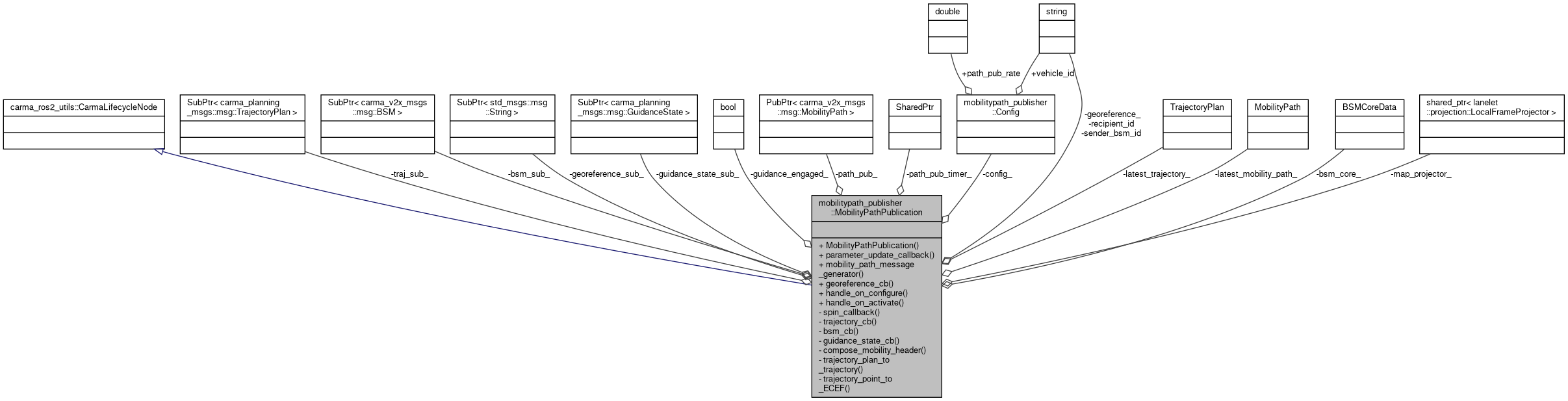
Private Attributes | |
| carma_ros2_utils::SubPtr< carma_planning_msgs::msg::TrajectoryPlan > | traj_sub_ |
| carma_ros2_utils::SubPtr< carma_v2x_msgs::msg::BSM > | bsm_sub_ |
| carma_ros2_utils::SubPtr< std_msgs::msg::String > | georeference_sub_ |
| carma_ros2_utils::SubPtr< carma_planning_msgs::msg::GuidanceState > | guidance_state_sub_ |
| bool | guidance_engaged_ = false |
| carma_ros2_utils::PubPtr< carma_v2x_msgs::msg::MobilityPath > | path_pub_ |
| rclcpp::TimerBase::SharedPtr | path_pub_timer_ |
| Config | config_ |
| carma_planning_msgs::msg::TrajectoryPlan | latest_trajectory_ |
| carma_v2x_msgs::msg::MobilityPath | latest_mobility_path_ |
| carma_v2x_msgs::msg::BSMCoreData | bsm_core_ |
| std::string | georeference_ {""} |
| std::shared_ptr< lanelet::projection::LocalFrameProjector > | map_projector_ |
| std::string | recipient_id = "" |
| std::string | sender_bsm_id = "FFFF" |
Detailed Description
The class responsible for publishing MobilityPath messages based on the latest trajectory plan.
Definition at line 44 of file mobilitypath_publisher.hpp.
Constructor & Destructor Documentation
◆ MobilityPathPublication()
|
explicit |
MobilityPathPublication constructor.
Definition at line 22 of file mobilitypath_publisher.cpp.
References config_, mobilitypath_publisher::Config::path_pub_rate, and mobilitypath_publisher::Config::vehicle_id.
Member Function Documentation
◆ bsm_cb()
|
private |
Callback for the BSM subscriber, which stores the BSM's BSMCoreData locally.
- Parameters
-
msg Latest BSM message
Definition at line 122 of file mobilitypath_publisher.cpp.
References bsm_core_.
Referenced by handle_on_configure().

◆ compose_mobility_header()
|
private |
Generates a MobilityHeader to be used for a published MobilityPath message.
- Parameters
-
time Time in milliseconds
- Returns
- A MobilityHeader
Definition at line 145 of file mobilitypath_publisher.cpp.
References bsm_core_, config_, recipient_id, carma_cooperative_perception::to_string(), and mobilitypath_publisher::Config::vehicle_id.
Referenced by mobility_path_message_generator().


◆ georeference_cb()
| void mobilitypath_publisher::MobilityPathPublication::georeference_cb | ( | const std_msgs::msg::String::UniquePtr | msg | ) |
Callback for map projection string to define lat/lon -> map conversion.
msg The proj string defining the projection.
Definition at line 106 of file mobilitypath_publisher.cpp.
References georeference_, and map_projector_.
Referenced by handle_on_configure().

◆ guidance_state_cb()
|
private |
Callback for the Guidance State.
- Parameters
-
msg Latest GuidanceState message
Definition at line 80 of file mobilitypath_publisher.cpp.
References lightbar_manager::ENGAGED, and guidance_engaged_.
Referenced by handle_on_configure().

◆ handle_on_activate()
| carma_ros2_utils::CallbackReturn mobilitypath_publisher::MobilityPathPublication::handle_on_activate | ( | const rclcpp_lifecycle::State & | prev_state | ) |
Definition at line 85 of file mobilitypath_publisher.cpp.
References config_, mobilitypath_publisher::Config::path_pub_rate, path_pub_timer_, and spin_callback().

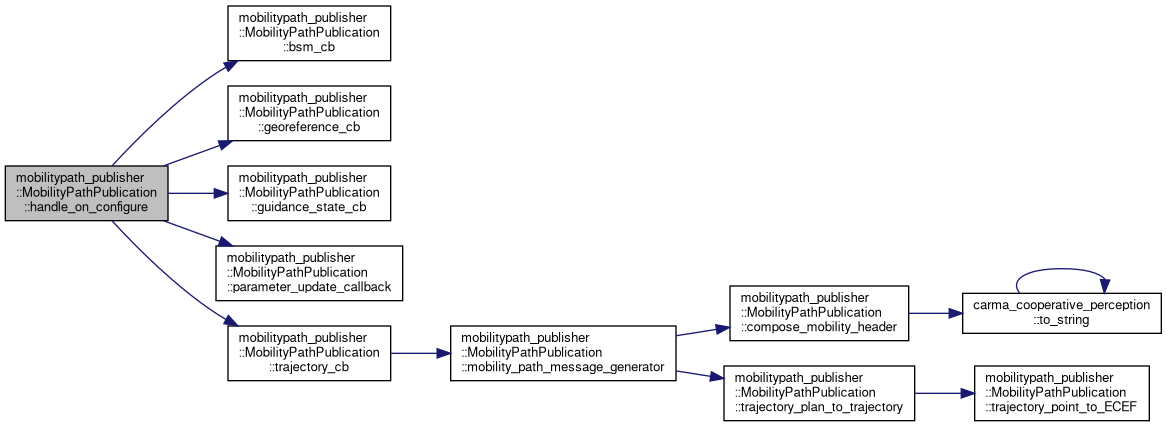
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn mobilitypath_publisher::MobilityPathPublication::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 45 of file mobilitypath_publisher.cpp.
References bsm_cb(), bsm_sub_, config_, georeference_cb(), georeference_sub_, guidance_state_cb(), guidance_state_sub_, parameter_update_callback(), path_pub_, mobilitypath_publisher::Config::path_pub_rate, traj_sub_, trajectory_cb(), and mobilitypath_publisher::Config::vehicle_id.
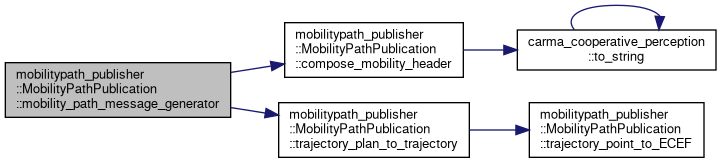
◆ mobility_path_message_generator()
| carma_v2x_msgs::msg::MobilityPath mobilitypath_publisher::MobilityPathPublication::mobility_path_message_generator | ( | const carma_planning_msgs::msg::TrajectoryPlan & | trajectory_plan | ) |
Generates a MobilityPath message from a TrajectoryPlan.
- Parameters
-
trajectory_plan A TrajectoryPlan
- Returns
- A MobilityPath message
Definition at line 127 of file mobilitypath_publisher.cpp.
References compose_mobility_header(), map_projector_, and trajectory_plan_to_trajectory().
Referenced by trajectory_cb().

◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult mobilitypath_publisher::MobilityPathPublication::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
Function callback for dynamic parameter updates.
Definition at line 33 of file mobilitypath_publisher.cpp.
References config_, mobilitypath_publisher::Config::path_pub_rate, and mobilitypath_publisher::Config::vehicle_id.
Referenced by handle_on_configure().

◆ spin_callback()
|
private |
Spin callback, which will be called frequently based on the configured spin rate.
Definition at line 96 of file mobilitypath_publisher.cpp.
References guidance_engaged_, latest_mobility_path_, and path_pub_.
Referenced by handle_on_activate().

◆ trajectory_cb()
|
private |
Callback for the trajectory plan subscriber, which stores the latest trajectory plan locally and stores its corresponding MobilityPath locally.
- Parameters
-
msg Latest trajectory plan message
Definition at line 116 of file mobilitypath_publisher.cpp.
References latest_mobility_path_, latest_trajectory_, and mobility_path_message_generator().
Referenced by handle_on_configure().


◆ trajectory_plan_to_trajectory()
|
private |
Converts a Trajectory Plan to a (Mobility) Trajectory.
- Parameters
-
traj_points The TrajectoryPlan to be converted into a (Mobility) Trajectory
- Returns
- A (Mobility) Trajectory
Definition at line 159 of file mobilitypath_publisher.cpp.
References process_bag::i, and trajectory_point_to_ECEF().
Referenced by mobility_path_message_generator().


◆ trajectory_point_to_ECEF()
|
private |
Converts Trajectory Plan Point to ECEF (accepts meters and outputs in cm)
- Parameters
-
traj_points The Trajectory Plan Point to be converted to ECEF
- Returns
- The Trajectory Plan Point in ECEF
Definition at line 193 of file mobilitypath_publisher.cpp.
References map_projector_.
Referenced by trajectory_plan_to_trajectory().

Member Data Documentation
◆ bsm_core_
|
private |
Definition at line 72 of file mobilitypath_publisher.hpp.
Referenced by bsm_cb(), and compose_mobility_header().
◆ bsm_sub_
|
private |
Definition at line 50 of file mobilitypath_publisher.hpp.
Referenced by handle_on_configure().
◆ config_
|
private |
Definition at line 63 of file mobilitypath_publisher.hpp.
Referenced by MobilityPathPublication(), compose_mobility_header(), handle_on_activate(), handle_on_configure(), and parameter_update_callback().
◆ georeference_
|
private |
Definition at line 75 of file mobilitypath_publisher.hpp.
Referenced by georeference_cb().
◆ georeference_sub_
|
private |
Definition at line 51 of file mobilitypath_publisher.hpp.
Referenced by handle_on_configure().
◆ guidance_engaged_
|
private |
Definition at line 54 of file mobilitypath_publisher.hpp.
Referenced by guidance_state_cb(), and spin_callback().
◆ guidance_state_sub_
|
private |
Definition at line 52 of file mobilitypath_publisher.hpp.
Referenced by handle_on_configure().
◆ latest_mobility_path_
|
private |
Definition at line 69 of file mobilitypath_publisher.hpp.
Referenced by spin_callback(), and trajectory_cb().
◆ latest_trajectory_
|
private |
Definition at line 66 of file mobilitypath_publisher.hpp.
Referenced by trajectory_cb().
◆ map_projector_
|
private |
Definition at line 76 of file mobilitypath_publisher.hpp.
Referenced by georeference_cb(), mobility_path_message_generator(), and trajectory_point_to_ECEF().
◆ path_pub_
|
private |
Definition at line 57 of file mobilitypath_publisher.hpp.
Referenced by handle_on_configure(), and spin_callback().
◆ path_pub_timer_
|
private |
Definition at line 60 of file mobilitypath_publisher.hpp.
Referenced by handle_on_activate().
◆ recipient_id
|
private |
Definition at line 79 of file mobilitypath_publisher.hpp.
Referenced by compose_mobility_header().
◆ sender_bsm_id
|
private |
Definition at line 82 of file mobilitypath_publisher.hpp.
◆ traj_sub_
|
private |
Definition at line 49 of file mobilitypath_publisher.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- mobilitypath_publisher/include/mobilitypath_publisher/mobilitypath_publisher.hpp
- mobilitypath_publisher/src/mobilitypath_publisher.cpp