#include <stop_and_dwell_strategic_plugin.hpp>

Public Member Functions | |
| StopAndDwellStrategicPlugin (const rclcpp::NodeOptions &) | |
| Default constructor for RouteFollowingPlugin class. More... | |
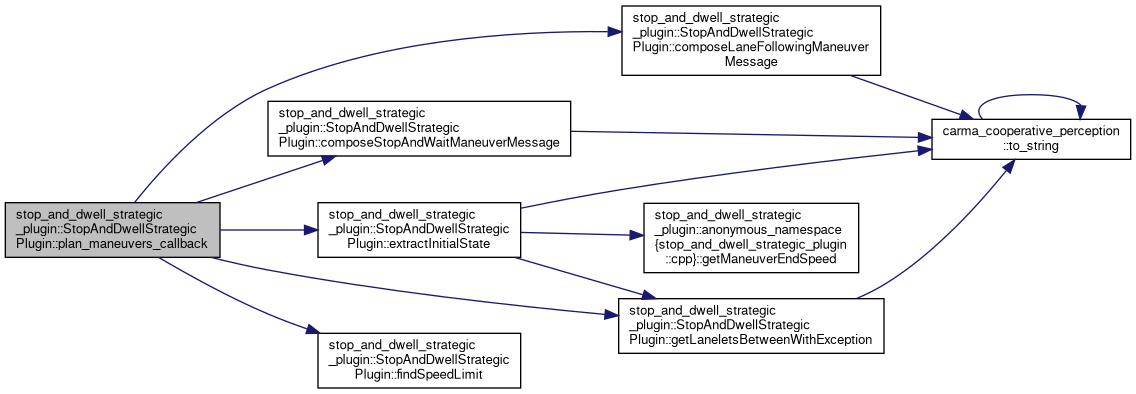
| void | plan_maneuvers_callback (std::shared_ptr< rmw_request_id_t > srv_header, carma_planning_msgs::srv::PlanManeuvers::Request::SharedPtr req, carma_planning_msgs::srv::PlanManeuvers::Response::SharedPtr resp) |
| Service callback for arbitrator maneuver planning. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| Callback for dynamic parameter updates. More... | |
| void | currentPoseCb (geometry_msgs::msg::PoseStamped::UniquePtr msg) |
| callback function for current pose More... | |
| carma_planning_msgs::msg::Maneuver | composeLaneFollowingManeuverMessage (double start_dist, double end_dist, double start_speed, double target_speed, rclcpp::Time start_time, double time_to_stop, std::vector< lanelet::Id > lane_ids) |
| Compose a lane keeping maneuver message based on input params. More... | |
| carma_planning_msgs::msg::Maneuver | composeStopAndWaitManeuverMessage (double current_dist, double end_dist, double start_speed, const lanelet::Id &starting_lane_id, const lanelet::Id &ending_lane_id, double stopping_accel, rclcpp::Time start_time, rclcpp::Time end_time) const |
| VehicleState | extractInitialState (const carma_planning_msgs::srv::PlanManeuvers::Request &req) const |
| Helper method to extract the initial vehicle state from the planning request method based on if the prior_plan was set or not. More... | |
| std::vector< lanelet::ConstLanelet > | getLaneletsBetweenWithException (double start_downtrack, double end_downtrack, bool shortest_path_only=false, bool bounds_inclusive=true) const |
| Helper method which calls carma_wm::WorldModel::getLaneletsBetween(start_downtrack, end_downtrack, shortest_path_only,
bounds_inclusive) and throws and exception if the returned list of lanelets is empty. See the referenced method for additional details on parameters. More... | |
| double | findSpeedLimit (const lanelet::ConstLanelet &llt) const |
| Given a Lanelet, find it's associated Speed Limit. More... | |
| void | guidance_state_cb (const carma_planning_msgs::msg::GuidanceState::UniquePtr msg) |
| Callback for the Guidance State. More... | |
| VehicleState | extractInitialState (carma_planning_msgs::srv::PlanManeuvers::Request::SharedPtr req) const |
| Helper method to extract the initial vehicle state from the planning request method based on if the prior_plan was set or not. More... | |
| carma_ros2_utils::CallbackReturn | on_configure_plugin () |
| Method which is triggered when this plugin is moved from the UNCONFIGURED to INACTIVE states. This method should be used to load parameters and is required to be implemented. More... | |
| carma_ros2_utils::CallbackReturn | on_activate_plugin () |
| Method which is triggered when this plugin is moved from the INACTIVE to ACTIVE states. This method should be used to prepare for future callbacks for plugin's capabilites. More... | |
| bool | get_availability () |
| Get the availability status of this plugin based on the current operating environment. Method must be overriden by extending classes. More... | |
| std::string | get_version_id () |
| Returns the version id of this plugin. More... | |
 Public Member Functions inherited from carma_guidance_plugins::StrategicPlugin Public Member Functions inherited from carma_guidance_plugins::StrategicPlugin | |
| StrategicPlugin (const rclcpp::NodeOptions &) | |
| StrategicPlugin constructor. More... | |
| virtual | ~StrategicPlugin ()=default |
| Virtual destructor for safe deletion. More... | |
| virtual void | plan_maneuvers_callback (std::shared_ptr< rmw_request_id_t > srv_header, carma_planning_msgs::srv::PlanManeuvers::Request::SharedPtr req, carma_planning_msgs::srv::PlanManeuvers::Response::SharedPtr resp)=0 |
| Extending class provided callback which should return a planned trajectory based on the provided trajectory planning request. More... | |
| std::string | get_capability () override |
| Get the capability string representing this plugins capabilities Method must be overriden by extending classes. Expectation is that abstract plugin type parent classes will provide a default implementation. More... | |
| uint8_t | get_type () override final |
| Returns the type of this plugin according to the carma_planning_msgs::Plugin type enum. Extending classes for the specific type should override this method. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) override final |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) override final |
| carma_ros2_utils::CallbackReturn | handle_on_deactivate (const rclcpp_lifecycle::State &) override final |
| carma_ros2_utils::CallbackReturn | handle_on_cleanup (const rclcpp_lifecycle::State &) override final |
| carma_ros2_utils::CallbackReturn | handle_on_shutdown (const rclcpp_lifecycle::State &) override final |
| carma_ros2_utils::CallbackReturn | handle_on_error (const rclcpp_lifecycle::State &, const std::string &exception_string) override final |
| Public Member Functions inherited from carma_guidance_plugins::PluginBaseNode | |
| PluginBaseNode (const rclcpp::NodeOptions &) | |
| PluginBaseNode constructor. More... | |
| virtual | ~PluginBaseNode ()=default |
| Virtual destructor for safe deletion. More... | |
| virtual std::shared_ptr< carma_wm::WMListener > | get_world_model_listener () final |
| Method to return the default world model listener provided as a convience by this base class If this method or get_world_model() are not called then the world model remains uninitialized and will not create unnecessary subscriptions. More... | |
| virtual carma_wm::WorldModelConstPtr | get_world_model () final |
| Method to return the default world model provided as a convience by this base class If this method or get_world_model_listener() are not called then the world model remains uninitialized and will not create unnecessary subscriptions. More... | |
| virtual bool | get_activation_status () final |
| Returns the activation status of this plugin. The plugins API callbacks will only be triggered when this method returns true. More... | |
| virtual uint8_t | get_type () |
| Returns the type of this plugin according to the carma_planning_msgs::Plugin type enum. Extending classes for the specific type should override this method. More... | |
| std::string | get_plugin_name_and_ns () const |
| Return the name of this plugin with namespace. NOTE: If only the name of the plugin is required, use get_plugin_name() More... | |
| std::string | get_plugin_name () const |
| Return the name of this plugin. More... | |
| virtual bool | get_availability ()=0 |
| Get the availability status of this plugin based on the current operating environment. Method must be overriden by extending classes. More... | |
| virtual std::string | get_capability ()=0 |
| Get the capability string representing this plugins capabilities Method must be overriden by extending classes. Expectation is that abstract plugin type parent classes will provide a default implementation. More... | |
| virtual std::string | get_version_id ()=0 |
| Returns the version id of this plugin. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_configure_plugin ()=0 |
| Method which is triggered when this plugin is moved from the UNCONFIGURED to INACTIVE states. This method should be used to load parameters and is required to be implemented. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_activate_plugin () |
| Method which is triggered when this plugin is moved from the INACTIVE to ACTIVE states. This method should be used to prepare for future callbacks for plugin's capabilites. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_deactivate_plugin () |
| Method which is triggered when this plugin is moved from the ACTIVE to INACTIVE states. This method should be used to disable any functionality which should cease execution when plugin is inactive. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_cleanup_plugin () |
| Method which is triggered when this plugin is moved from the INACTIVE to UNCONFIGURED states. This method should be used to fully reset the plugin such that a future call to on_configure_plugin would leave the plugin in a fresh state as though just launched. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_shutdown_plugin () |
| Method which is triggered when this plugin is moved from any state to FINALIZED This method should be used to generate any shutdown logs or final cleanup. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_error_plugin (const std::string &exception_string) |
| Method which is triggered when an unhandled exception occurs in this plugin This method should be used to cleanup such that the plugin could be moved to UNCONFIGURED state if possible. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) override |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) override |
| carma_ros2_utils::CallbackReturn | handle_on_deactivate (const rclcpp_lifecycle::State &) override |
| carma_ros2_utils::CallbackReturn | handle_on_cleanup (const rclcpp_lifecycle::State &) override |
| carma_ros2_utils::CallbackReturn | handle_on_shutdown (const rclcpp_lifecycle::State &) override |
| carma_ros2_utils::CallbackReturn | handle_on_error (const rclcpp_lifecycle::State &, const std::string &exception_string) override |
| FRIEND_TEST (carma_guidance_plugins_test, connections_test) | |
Public Attributes | |
| bool | vehicle_engaged_ = false |
| double | speed_limit_ = 100.0 |
| double | current_downtrack_ = 0.0 |
| double | bus_stop_downtrack_ = 0.0 |
| bool | first_stop_ = true |
| rclcpp::Time | time_to_move_ |
| std::string | logger_name_ ="stop_and_dwell_strategic_plugin" |
| double | max_comfort_accel_ = 2.0 |
| double | max_comfort_decel_ = -2.0 |
| double | max_comfort_decel_norm_ = -1 * max_comfort_decel_ |
| bool | approaching_stop_controlled_interction_ = false |
Private Member Functions | |
| carma_wm::WorldModelConstPtr | get_wm () |
| void | set_wm (carma_wm::WorldModelConstPtr new_wm) |
| FRIEND_TEST (StopAndDwellStrategicPluginTest, findSpeedLimit) | |
| FRIEND_TEST (StopAndDwellStrategicPluginTest, maneuvercbtest) | |
Private Attributes | |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::PoseStamped > | current_pose_sub_ |
| carma_ros2_utils::SubPtr< carma_planning_msgs::msg::GuidanceState > | guidance_state_sub_ |
| bool | guidance_engaged_ = false |
| carma_wm::WorldModelConstPtr | wm_ |
| World Model pointer. More... | |
| StopAndDwellStrategicPluginConfig | config_ |
| Config containing configurable algorithm parameters. More... | |
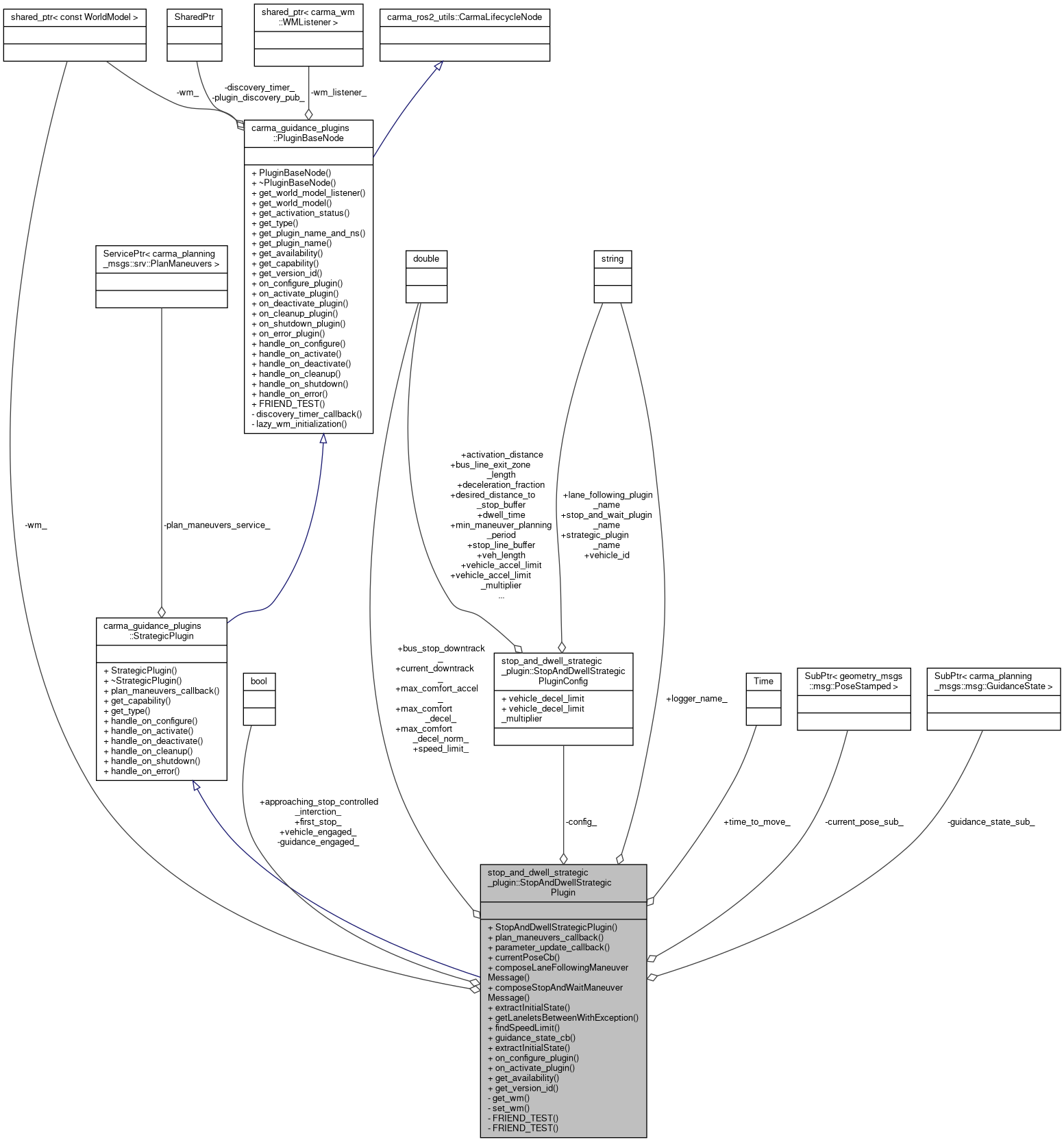
Detailed Description
Definition at line 51 of file stop_and_dwell_strategic_plugin.hpp.
Constructor & Destructor Documentation
◆ StopAndDwellStrategicPlugin()
|
explicit |
Default constructor for RouteFollowingPlugin class.
Definition at line 58 of file stop_and_dwell_strategic_plugin.cpp.
References stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::activation_distance, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::bus_line_exit_zone_length, config_, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::deceleration_fraction, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::desired_distance_to_stop_buffer, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::dwell_time, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::lane_following_plugin_name, max_comfort_accel_, max_comfort_decel_, max_comfort_decel_norm_, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::stop_line_buffer, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::strategic_plugin_name, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::veh_length, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_accel_limit, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_accel_limit_multiplier, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_decel_limit, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_decel_limit_multiplier, and stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_id.
Member Function Documentation
◆ composeLaneFollowingManeuverMessage()
| carma_planning_msgs::msg::Maneuver stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::composeLaneFollowingManeuverMessage | ( | double | start_dist, |
| double | end_dist, | ||
| double | start_speed, | ||
| double | target_speed, | ||
| rclcpp::Time | start_time, | ||
| double | time_to_stop, | ||
| std::vector< lanelet::Id > | lane_ids | ||
| ) |
Compose a lane keeping maneuver message based on input params.
- Parameters
-
start_dist Start downtrack distance of the current maneuver end_dist End downtrack distance of the current maneuver start_speed Start speed of the current maneuver target_speed Target speed pf the current maneuver, usually it is the lanelet speed limit start_time The starting time of the maneuver end_time The ending time of the maneuver lane_ids List of lanelet IDs that the current maneuver traverses. Message expects these to be contiguous and end to end
- Returns
- A lane keeping maneuver message which is ready to be published
Definition at line 346 of file stop_and_dwell_strategic_plugin.cpp.
References config_, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::lane_following_plugin_name, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::strategic_plugin_name, and carma_cooperative_perception::to_string().
Referenced by plan_maneuvers_callback().


◆ composeStopAndWaitManeuverMessage()
| carma_planning_msgs::msg::Maneuver stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::composeStopAndWaitManeuverMessage | ( | double | current_dist, |
| double | end_dist, | ||
| double | start_speed, | ||
| const lanelet::Id & | starting_lane_id, | ||
| const lanelet::Id & | ending_lane_id, | ||
| double | stopping_accel, | ||
| rclcpp::Time | start_time, | ||
| rclcpp::Time | end_time | ||
| ) | const |
Definition at line 386 of file stop_and_dwell_strategic_plugin.cpp.
References config_, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::stop_and_wait_plugin_name, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::stop_line_buffer, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::strategic_plugin_name, and carma_cooperative_perception::to_string().
Referenced by plan_maneuvers_callback().


◆ currentPoseCb()
| void stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::currentPoseCb | ( | geometry_msgs::msg::PoseStamped::UniquePtr | msg | ) |
callback function for current pose
- Parameters
-
msg input pose stamed msg
Definition at line 181 of file stop_and_dwell_strategic_plugin.cpp.
References current_downtrack_, vehicle_engaged_, and wm_.
Referenced by on_configure_plugin().

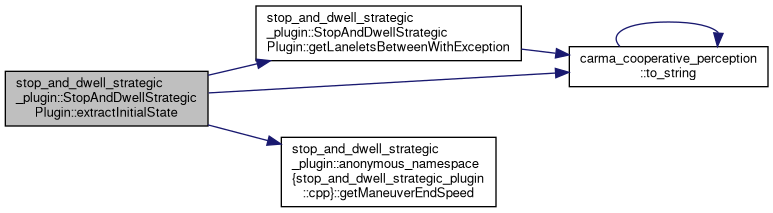
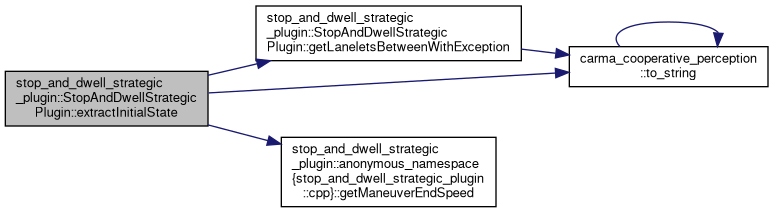
◆ extractInitialState() [1/2]
| VehicleState stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::extractInitialState | ( | carma_planning_msgs::srv::PlanManeuvers::Request::SharedPtr | req | ) | const |
Helper method to extract the initial vehicle state from the planning request method based on if the prior_plan was set or not.
- Parameters
-
req The maneuver planning request to extract the vehicle state from
- Returns
- The extracted VehicleState
Definition at line 211 of file stop_and_dwell_strategic_plugin.cpp.
References stop_and_dwell_strategic_plugin::VehicleState::downtrack, GET_MANEUVER_PROPERTY, getLaneletsBetweenWithException(), stop_and_dwell_strategic_plugin::anonymous_namespace{stop_and_dwell_strategic_plugin.cpp}::getManeuverEndSpeed(), stop_and_dwell_strategic_plugin::VehicleState::lane_id, logger_name_, stop_and_dwell_strategic_plugin::VehicleState::speed, stop_and_dwell_strategic_plugin::VehicleState::stamp, and carma_cooperative_perception::to_string().
◆ extractInitialState() [2/2]
| VehicleState stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::extractInitialState | ( | const carma_planning_msgs::srv::PlanManeuvers::Request & | req | ) | const |
Helper method to extract the initial vehicle state from the planning request method based on if the prior_plan was set or not.
- Parameters
-
req The maneuver planning request to extract the vehicle state from
- Returns
- The extracted VehicleState
Definition at line 147 of file stop_and_dwell_strategic_plugin.cpp.
References stop_and_dwell_strategic_plugin::VehicleState::downtrack, GET_MANEUVER_PROPERTY, getLaneletsBetweenWithException(), stop_and_dwell_strategic_plugin::anonymous_namespace{stop_and_dwell_strategic_plugin.cpp}::getManeuverEndSpeed(), stop_and_dwell_strategic_plugin::VehicleState::lane_id, stop_and_dwell_strategic_plugin::VehicleState::speed, stop_and_dwell_strategic_plugin::VehicleState::stamp, and carma_cooperative_perception::to_string().
Referenced by plan_maneuvers_callback().

◆ findSpeedLimit()
| double stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::findSpeedLimit | ( | const lanelet::ConstLanelet & | llt | ) | const |
Given a Lanelet, find it's associated Speed Limit.
- Parameters
-
llt Constant Lanelet object
- Exceptions
-
std::invalid_argument if the speed limit could not be retrieved
- Returns
- value of speed limit in mps
Definition at line 373 of file stop_and_dwell_strategic_plugin.cpp.
References wm_.
Referenced by plan_maneuvers_callback().

◆ FRIEND_TEST() [1/2]
|
private |
◆ FRIEND_TEST() [2/2]
|
private |
◆ get_availability()
|
virtual |
Get the availability status of this plugin based on the current operating environment. Method must be overriden by extending classes.
- Returns
- This method should return true if the plugin's current understanding of the world means it would be capable of planning or executing its capability.
Implements carma_guidance_plugins::PluginBaseNode.
Definition at line 415 of file stop_and_dwell_strategic_plugin.cpp.
◆ get_version_id()
|
virtual |
Returns the version id of this plugin.
- Returns
- The version id represented as a string
Implements carma_guidance_plugins::PluginBaseNode.
Definition at line 420 of file stop_and_dwell_strategic_plugin.cpp.
◆ get_wm()
|
inlineprivate |
◆ getLaneletsBetweenWithException()
| std::vector< lanelet::ConstLanelet > stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::getLaneletsBetweenWithException | ( | double | start_downtrack, |
| double | end_downtrack, | ||
| bool | shortest_path_only = false, |
||
| bool | bounds_inclusive = true |
||
| ) | const |
Helper method which calls carma_wm::WorldModel::getLaneletsBetween(start_downtrack, end_downtrack, shortest_path_only, bounds_inclusive) and throws and exception if the returned list of lanelets is empty. See the referenced method for additional details on parameters.
Definition at line 193 of file stop_and_dwell_strategic_plugin.cpp.
References carma_cooperative_perception::to_string(), and wm_.
Referenced by extractInitialState(), and plan_maneuvers_callback().


◆ guidance_state_cb()
| void stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::guidance_state_cb | ( | const carma_planning_msgs::msg::GuidanceState::UniquePtr | msg | ) |
Callback for the Guidance State.
- Parameters
-
msg Latest GuidanceState message
Definition at line 176 of file stop_and_dwell_strategic_plugin.cpp.
References lightbar_manager::ENGAGED, and guidance_engaged_.
Referenced by on_configure_plugin().

◆ on_activate_plugin()
|
virtual |
Method which is triggered when this plugin is moved from the INACTIVE to ACTIVE states. This method should be used to prepare for future callbacks for plugin's capabilites.
- Returns
- SUCCESS, FAILURE, or ERROR. Transition to ACTIVE will only complete on SUCCESS.
Reimplemented from carma_guidance_plugins::PluginBaseNode.
Definition at line 142 of file stop_and_dwell_strategic_plugin.cpp.
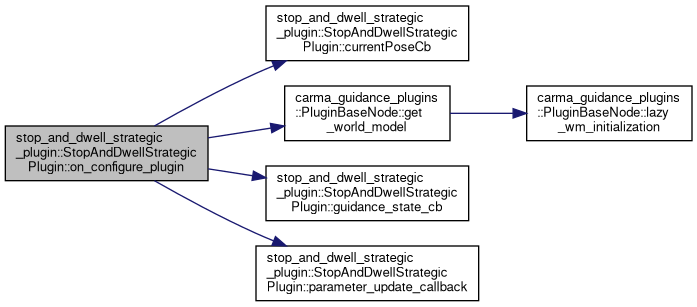
◆ on_configure_plugin()
|
virtual |
Method which is triggered when this plugin is moved from the UNCONFIGURED to INACTIVE states. This method should be used to load parameters and is required to be implemented.
- Returns
- SUCCESS, FAILURE, or ERROR. Transition to INACTIVE will only complete on SUCCESS.
Implements carma_guidance_plugins::PluginBaseNode.
Definition at line 82 of file stop_and_dwell_strategic_plugin.cpp.
References stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::activation_distance, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::bus_line_exit_zone_length, config_, current_pose_sub_, currentPoseCb(), stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::deceleration_fraction, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::desired_distance_to_stop_buffer, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::dwell_time, carma_guidance_plugins::PluginBaseNode::get_world_model(), guidance_state_cb(), guidance_state_sub_, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::lane_following_plugin_name, max_comfort_accel_, max_comfort_decel_, max_comfort_decel_norm_, parameter_update_callback(), stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::stop_line_buffer, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::strategic_plugin_name, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::veh_length, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_accel_limit, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_accel_limit_multiplier, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_decel_limit, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_decel_limit_multiplier, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_id, and wm_.
◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
Callback for dynamic parameter updates.
Definition at line 126 of file stop_and_dwell_strategic_plugin.cpp.
References stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::bus_line_exit_zone_length, config_, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::stop_line_buffer, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_accel_limit_multiplier, and stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::vehicle_decel_limit_multiplier.
Referenced by on_configure_plugin().

◆ plan_maneuvers_callback()
|
virtual |
Service callback for arbitrator maneuver planning.
- Parameters
-
req Plan maneuver request resp Plan maneuver response with a list of maneuver plan
- Returns
- If service call successed
Implements carma_guidance_plugins::StrategicPlugin.
Definition at line 239 of file stop_and_dwell_strategic_plugin.cpp.
References stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::activation_distance, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::bus_line_exit_zone_length, bus_stop_downtrack_, composeLaneFollowingManeuverMessage(), composeStopAndWaitManeuverMessage(), config_, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::deceleration_fraction, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::desired_distance_to_stop_buffer, stop_and_dwell_strategic_plugin::VehicleState::downtrack, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::dwell_time, extractInitialState(), findSpeedLimit(), first_stop_, getLaneletsBetweenWithException(), logger_name_, max_comfort_decel_norm_, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::min_maneuver_planning_period, stop_and_dwell_strategic_plugin::VehicleState::speed, speed_limit_, stop_and_dwell_strategic_plugin::StopAndDwellStrategicPluginConfig::stop_line_buffer, time_to_move_, and wm_.
◆ set_wm()
|
inlineprivate |
Definition at line 197 of file stop_and_dwell_strategic_plugin.hpp.
References wm_.
Member Data Documentation
◆ approaching_stop_controlled_interction_
| bool stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::approaching_stop_controlled_interction_ = false |
Definition at line 180 of file stop_and_dwell_strategic_plugin.hpp.
◆ bus_stop_downtrack_
| double stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::bus_stop_downtrack_ = 0.0 |
Definition at line 171 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by plan_maneuvers_callback().
◆ config_
|
private |
Config containing configurable algorithm parameters.
Definition at line 193 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by StopAndDwellStrategicPlugin(), composeLaneFollowingManeuverMessage(), composeStopAndWaitManeuverMessage(), on_configure_plugin(), parameter_update_callback(), and plan_maneuvers_callback().
◆ current_downtrack_
| double stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::current_downtrack_ = 0.0 |
Definition at line 169 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by currentPoseCb().
◆ current_pose_sub_
|
private |
Definition at line 184 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by on_configure_plugin().
◆ first_stop_
| bool stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::first_stop_ = true |
Definition at line 172 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by plan_maneuvers_callback().
◆ guidance_engaged_
|
private |
Definition at line 187 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by guidance_state_cb().
◆ guidance_state_sub_
|
private |
Definition at line 185 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by on_configure_plugin().
◆ logger_name_
| std::string stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::logger_name_ ="stop_and_dwell_strategic_plugin" |
Definition at line 174 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by extractInitialState(), and plan_maneuvers_callback().
◆ max_comfort_accel_
| double stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::max_comfort_accel_ = 2.0 |
Definition at line 176 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by StopAndDwellStrategicPlugin(), and on_configure_plugin().
◆ max_comfort_decel_
| double stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::max_comfort_decel_ = -2.0 |
Definition at line 177 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by StopAndDwellStrategicPlugin(), and on_configure_plugin().
◆ max_comfort_decel_norm_
| double stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::max_comfort_decel_norm_ = -1 * max_comfort_decel_ |
Definition at line 178 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by StopAndDwellStrategicPlugin(), on_configure_plugin(), and plan_maneuvers_callback().
◆ speed_limit_
| double stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::speed_limit_ = 100.0 |
Definition at line 166 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by plan_maneuvers_callback().
◆ time_to_move_
| rclcpp::Time stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::time_to_move_ |
Definition at line 173 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by plan_maneuvers_callback().
◆ vehicle_engaged_
| bool stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::vehicle_engaged_ = false |
Definition at line 163 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by currentPoseCb().
◆ wm_
|
private |
World Model pointer.
Definition at line 190 of file stop_and_dwell_strategic_plugin.hpp.
Referenced by currentPoseCb(), findSpeedLimit(), get_wm(), getLaneletsBetweenWithException(), on_configure_plugin(), plan_maneuvers_callback(), and set_wm().
The documentation for this class was generated from the following files:
- stop_and_dwell_strategic_plugin/include/stop_and_dwell_strategic_plugin.hpp
- stop_and_dwell_strategic_plugin/src/stop_and_dwell_strategic_plugin.cpp