helper_functions.hpp File Reference
#include <basic_autonomy/basic_autonomy.hpp>
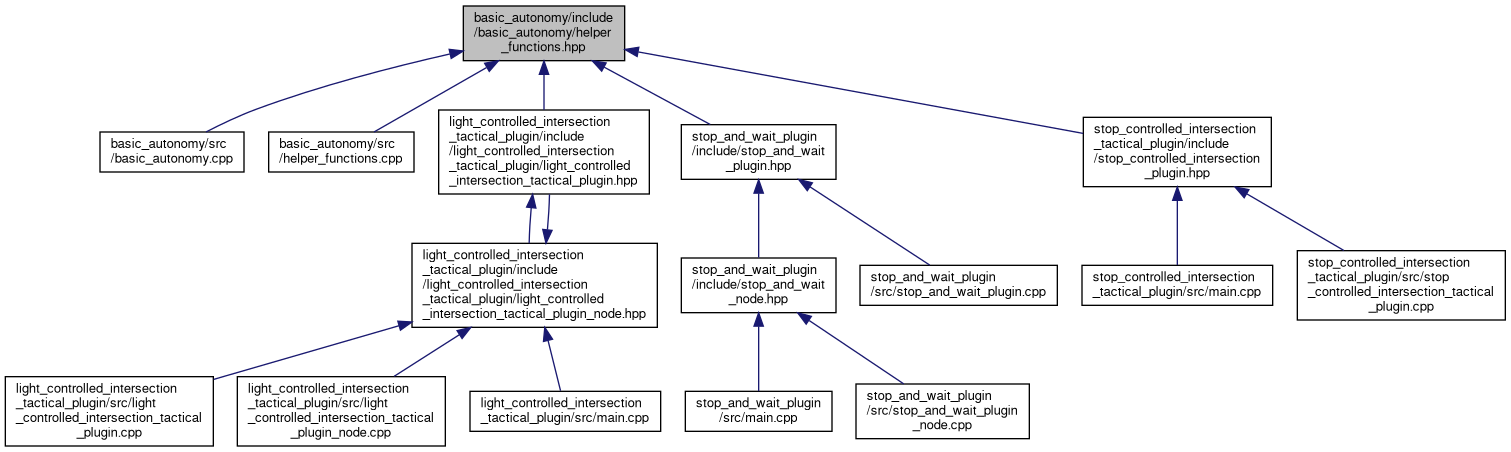
Include dependency graph for helper_functions.hpp:

This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | basic_autonomy |
| namespace | basic_autonomy::waypoint_generation |
Functions | |
| int | basic_autonomy::waypoint_generation::get_nearest_point_index (const std::vector< lanelet::BasicPoint2d > &points, const carma_planning_msgs::msg::VehicleState &state) |
| Returns the nearest point (in terms of cartesian 2d distance) to the provided vehicle pose in the provided l. More... | |
| size_t | basic_autonomy::waypoint_generation::get_nearest_point_index (const std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > &trajectory, const lanelet::BasicPoint2d &position) |
| Find the index of the closest trajectory plan point to a given position. More... | |
| int | basic_autonomy::waypoint_generation::get_nearest_point_index (const std::vector< PointSpeedPair > &points, const carma_planning_msgs::msg::VehicleState &state) |
| Returns the nearest point (in terms of cartesian 2d distance) to the provided vehicle pose in the provided list. More... | |
| int | basic_autonomy::waypoint_generation::get_nearest_index_by_downtrack (const std::vector< lanelet::BasicPoint2d > &points, const carma_wm::WorldModelConstPtr &wm, double target_downtrack) |
| Returns the nearest "less than" point to the provided vehicle pose in the provided list by utilizing the downtrack measured along the route NOTE: This function compares the downtrack, provided by routeTrackPos, of each points in the list to get the closest one to the given point's downtrack. Therefore, it is rather costlier method than comparing cartesian distance between the points and getting the closest. This way, however, the function correctly returns the end point's index if the given state, despite being valid, is farther than the given points and can technically be near any of them. More... | |
| void | basic_autonomy::waypoint_generation::split_point_speed_pairs (const std::vector< PointSpeedPair > &points, std::vector< lanelet::BasicPoint2d > *basic_points, std::vector< double > *speeds) |
| Helper method to split a list of PointSpeedPair into separate point and speed lists. More... | |
| int | basic_autonomy::waypoint_generation::get_nearest_index_by_downtrack (const std::vector< PointSpeedPair > &points, const carma_wm::WorldModelConstPtr &wm, const carma_planning_msgs::msg::VehicleState &state) |
| Overload: Returns the nearest point to the provided vehicle pose in the provided list by utilizing the downtrack measured along the route NOTE: This function compares the downtrack, provided by routeTrackPos, of each points in the list to get the closest one to the given point's downtrack. Therefore, it is rather costlier method than comparing cartesian distance between the points and getting the closest. This way, however, the function correctly returns the end point's index if the given state, despite being valid, is farther than the given points and can technically be near any of them. More... | |
| int | basic_autonomy::waypoint_generation::get_nearest_index_by_downtrack (const std::vector< lanelet::BasicPoint2d > &points, const carma_wm::WorldModelConstPtr &wm, const carma_planning_msgs::msg::VehicleState &state) |
| Overload: Returns the nearest point to the provided vehicle pose in the provided list by utilizing the downtrack measured along the route NOTE: This function compares the downtrack, provided by routeTrackPos, of each points in the list to get the closest one to the given point's downtrack. Therefore, it is rather costlier method than comparing cartesian distance between the points and getting the closest. This way, however, the function correctly returns the end point if the given state, despite being valid, is farther than the given points and can technically be near any of them. More... | |
| std::vector< lanelet::BasicPoint2d > | basic_autonomy::waypoint_generation::build_chain_centerline (const carma_wm::WorldModelConstPtr &wm, lanelet::ConstLanelet pivot, double backward_length, double forward_length) |
| Builds a centerline covering [pivot_end_point - backward_length, pivot_end_point + forward_length] by walking the pivot lanelet's own predecessor/successor chain in the routing graph. More... | |
| void | basic_autonomy::waypoint_generation::extrapolate_to_length (std::vector< lanelet::BasicPoint2d > ¢erline, double target_length, const std::string &description) |
| Pads a centerline out to target_length by extrapolating a straight line from its last known heading, if map connectivity could not supply enough real geometry (e.g. because a lanelet the lane change needed was closed or missing from the map). More... | |
Variables | |
| const double | basic_autonomy::waypoint_generation::epsilon_ = 0.0000001 |