platooning_tactical_plugin.h File Reference
#include <vector>#include <carma_planning_msgs/msg/trajectory_plan.hpp>#include <carma_planning_msgs/msg/trajectory_plan_point.hpp>#include <carma_wm/Geometry.hpp>#include <carma_planning_msgs/srv/plan_trajectory.hpp>#include <carma_wm/WMListener.hpp>#include <functional>#include <unordered_set>#include <carma_debug_ros2_msgs/msg/trajectory_curvature_speeds.hpp>#include <basic_autonomy/basic_autonomy.hpp>#include <carma_ros2_utils/timers/TimerFactory.hpp>#include "platooning_tactical_plugin_config.h"
Include dependency graph for platooning_tactical_plugin.h:

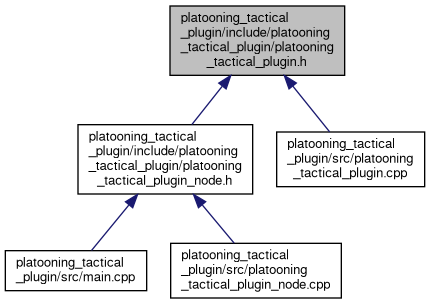
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | platooning_tactical_plugin::PointSpeedPair |
| Convenience class for pairing 2d points with speeds. More... | |
| class | platooning_tactical_plugin::PlatooningTacticalPlugin |
| Class containing primary business logic for the Platooning Tactical Plugin for trajectory generation. More... | |
Namespaces | |
| namespace | platooning_tactical_plugin |
Typedefs | |
| using | platooning_tactical_plugin::DebugPublisher = std::function< void(const carma_debug_ros2_msgs::msg::TrajectoryCurvatureSpeeds &)> |