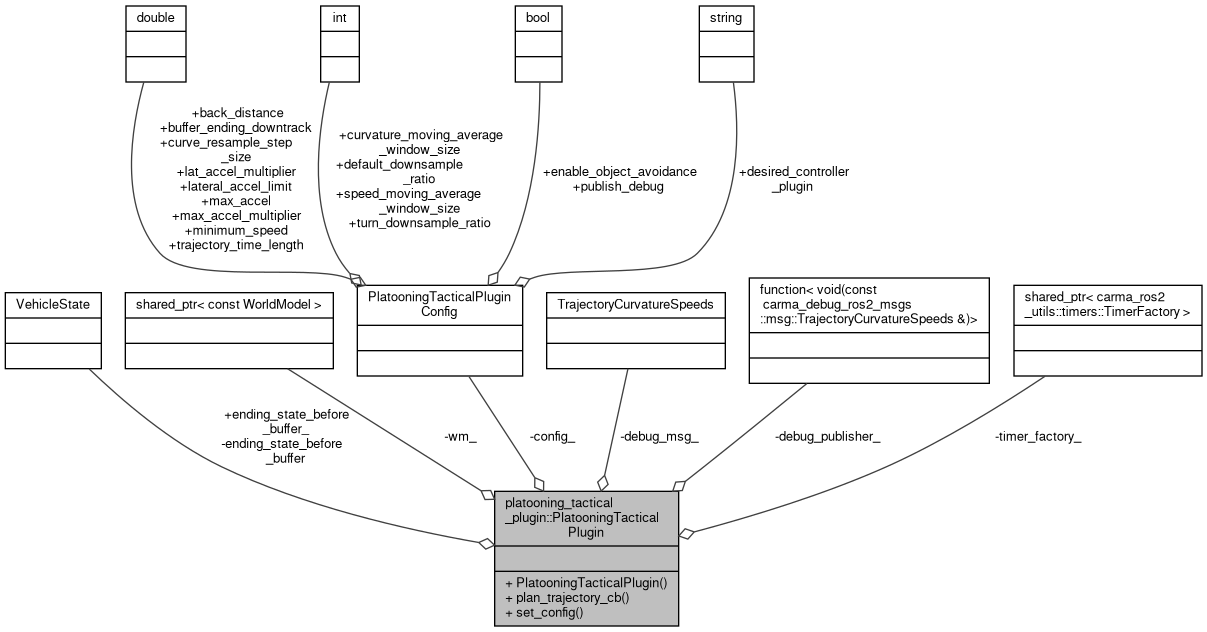
Class containing primary business logic for the Platooning Tactical Plugin for trajectory generation. More...
#include <platooning_tactical_plugin.h>
Public Member Functions | |
| PlatooningTacticalPlugin (carma_wm::WorldModelConstPtr wm, PlatooningTacticalPluginConfig config, std::shared_ptr< carma_ros2_utils::timers::TimerFactory > timer_factory) | |
| Constructor. More... | |
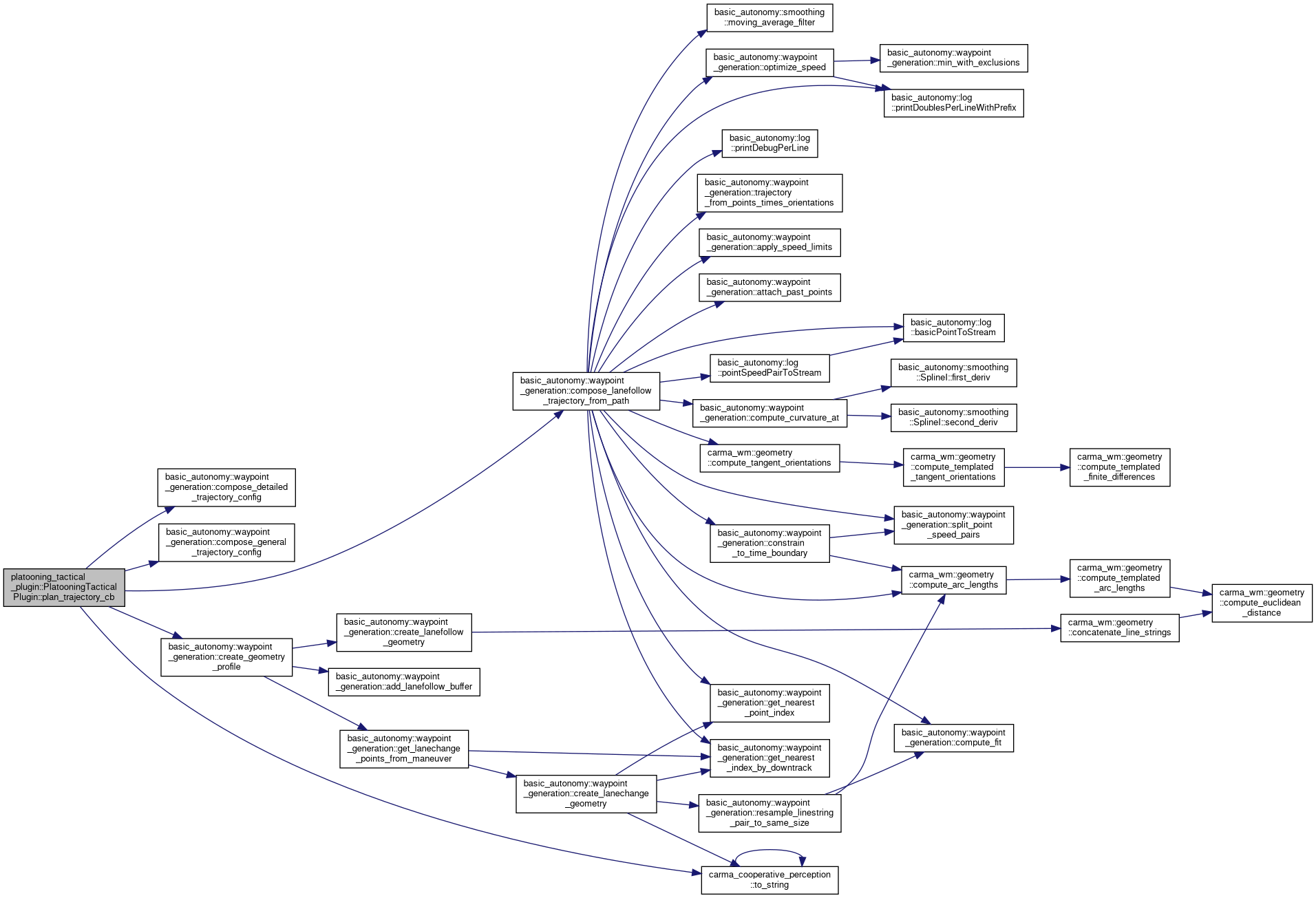
| bool | plan_trajectory_cb (carma_planning_msgs::srv::PlanTrajectory::Request &req, carma_planning_msgs::srv::PlanTrajectory::Response &resp) |
| Service callback for trajectory planning. More... | |
| void | set_config (PlatooningTacticalPluginConfig config) |
| Set the current config. More... | |
Public Attributes | |
| carma_planning_msgs::msg::VehicleState | ending_state_before_buffer_ |
Private Attributes | |
| carma_wm::WorldModelConstPtr | wm_ |
| PlatooningTacticalPluginConfig | config_ |
| carma_debug_ros2_msgs::msg::TrajectoryCurvatureSpeeds | debug_msg_ |
| DebugPublisher | debug_publisher_ |
| carma_planning_msgs::msg::VehicleState | ending_state_before_buffer |
| std::shared_ptr< carma_ros2_utils::timers::TimerFactory > | timer_factory_ |
Detailed Description
Class containing primary business logic for the Platooning Tactical Plugin for trajectory generation.
Definition at line 50 of file platooning_tactical_plugin.h.
Constructor & Destructor Documentation
◆ PlatooningTacticalPlugin()
| platooning_tactical_plugin::PlatooningTacticalPlugin::PlatooningTacticalPlugin | ( | carma_wm::WorldModelConstPtr | wm, |
| PlatooningTacticalPluginConfig | config, | ||
| std::shared_ptr< carma_ros2_utils::timers::TimerFactory > | timer_factory | ||
| ) |
Constructor.
- Parameters
-
wm Pointer to initalized instance of the carma world model for accessing semantic map data config The configuration to be used for this object
Definition at line 39 of file platooning_tactical_plugin.cpp.
Member Function Documentation
◆ plan_trajectory_cb()
| bool platooning_tactical_plugin::PlatooningTacticalPlugin::plan_trajectory_cb | ( | carma_planning_msgs::srv::PlanTrajectory::Request & | req, |
| carma_planning_msgs::srv::PlanTrajectory::Response & | resp | ||
| ) |
Service callback for trajectory planning.
- Parameters
-
req The service request resp The service response
- Returns
- True if success. False otherwise
Definition at line 44 of file platooning_tactical_plugin.cpp.
References PlatooningTacticalPluginConfig::back_distance, PlatooningTacticalPluginConfig::buffer_ending_downtrack, basic_autonomy::waypoint_generation::compose_detailed_trajectory_config(), basic_autonomy::waypoint_generation::compose_general_trajectory_config(), basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path(), config_, basic_autonomy::waypoint_generation::create_geometry_profile(), PlatooningTacticalPluginConfig::curvature_moving_average_window_size, PlatooningTacticalPluginConfig::curve_resample_step_size, debug_msg_, debug_publisher_, PlatooningTacticalPluginConfig::default_downsample_ratio, PlatooningTacticalPluginConfig::desired_controller_plugin, ending_state_before_buffer_, process_bag::i, PlatooningTacticalPluginConfig::lat_accel_multiplier, PlatooningTacticalPluginConfig::lateral_accel_limit, PlatooningTacticalPluginConfig::max_accel, PlatooningTacticalPluginConfig::max_accel_multiplier, PlatooningTacticalPluginConfig::minimum_speed, PlatooningTacticalPluginConfig::publish_debug, PlatooningTacticalPluginConfig::speed_moving_average_window_size, timer_factory_, carma_cooperative_perception::to_string(), PlatooningTacticalPluginConfig::trajectory_time_length, PlatooningTacticalPluginConfig::turn_downsample_ratio, and wm_.
◆ set_config()
| void platooning_tactical_plugin::PlatooningTacticalPlugin::set_config | ( | PlatooningTacticalPluginConfig | config | ) |
Set the current config.
Definition at line 120 of file platooning_tactical_plugin.cpp.
References config_.
Member Data Documentation
◆ config_
|
private |
Definition at line 82 of file platooning_tactical_plugin.h.
Referenced by plan_trajectory_cb(), and set_config().
◆ debug_msg_
|
private |
Definition at line 84 of file platooning_tactical_plugin.h.
Referenced by plan_trajectory_cb().
◆ debug_publisher_
|
private |
Definition at line 85 of file platooning_tactical_plugin.h.
Referenced by plan_trajectory_cb().
◆ ending_state_before_buffer
|
private |
Definition at line 87 of file platooning_tactical_plugin.h.
◆ ending_state_before_buffer_
| carma_planning_msgs::msg::VehicleState platooning_tactical_plugin::PlatooningTacticalPlugin::ending_state_before_buffer_ |
Definition at line 78 of file platooning_tactical_plugin.h.
Referenced by plan_trajectory_cb().
◆ timer_factory_
|
private |
Definition at line 89 of file platooning_tactical_plugin.h.
Referenced by plan_trajectory_cb().
◆ wm_
|
private |
Definition at line 81 of file platooning_tactical_plugin.h.
Referenced by plan_trajectory_cb().
The documentation for this class was generated from the following files:
- platooning_tactical_plugin/include/platooning_tactical_plugin/platooning_tactical_plugin.h
- platooning_tactical_plugin/src/platooning_tactical_plugin.cpp