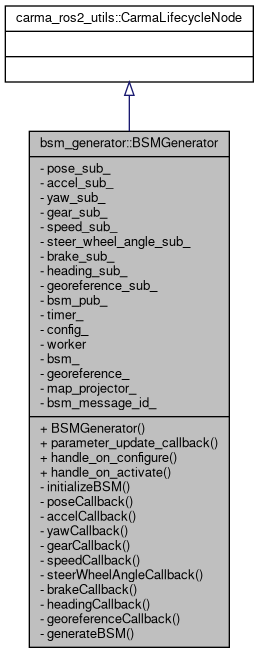
The class responsible for publishing BSM messages. More...
#include <bsm_generator_node.hpp>
Public Member Functions | |
| BSMGenerator (const rclcpp::NodeOptions &) | |
| BSMGenerator constructor. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| Function callback for dynamic parameter updates. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) |
Private Member Functions | |
| void | initializeBSM () |
| Function to fill the BSM message with initial default data. More... | |
| void | poseCallback (const geometry_msgs::msg::PoseStamped::UniquePtr msg) |
| Callback to populate BSM message with longitude, latitude, and elevation data. More... | |
| void | accelCallback (const automotive_platform_msgs::msg::VelocityAccelCov::UniquePtr msg) |
| Callback to populate BSM message with longitudinal acceleration data. More... | |
| void | yawCallback (const sensor_msgs::msg::Imu::UniquePtr msg) |
| Callback to populate BSM message with yaw rate data. More... | |
| void | gearCallback (const j2735_v2x_msgs::msg::TransmissionState::UniquePtr msg) |
| Callback to populate BSM message with transmission state data. More... | |
| void | speedCallback (const geometry_msgs::msg::TwistStamped::UniquePtr msg) |
| Callback to populate BSM message with vehicle speed data. More... | |
| void | steerWheelAngleCallback (const std_msgs::msg::Float64::UniquePtr msg) |
| Callback to populate BSM message with vehicle steering wheel angle data. More... | |
| void | brakeCallback (const std_msgs::msg::Float64::UniquePtr msg) |
| Callback to populate BSM message with vehicle applied brake status. More... | |
| void | headingCallback (const gps_msgs::msg::GPSFix::UniquePtr msg) |
| Callback to populate BSM message with vehicle heading data. More... | |
| void | georeferenceCallback (const std_msgs::msg::String::UniquePtr msg) |
| Callback for map projection string to define lat/lon -> map conversion. More... | |
| void | generateBSM () |
| Timer callback, which publishes a BSM. More... | |
Private Attributes | |
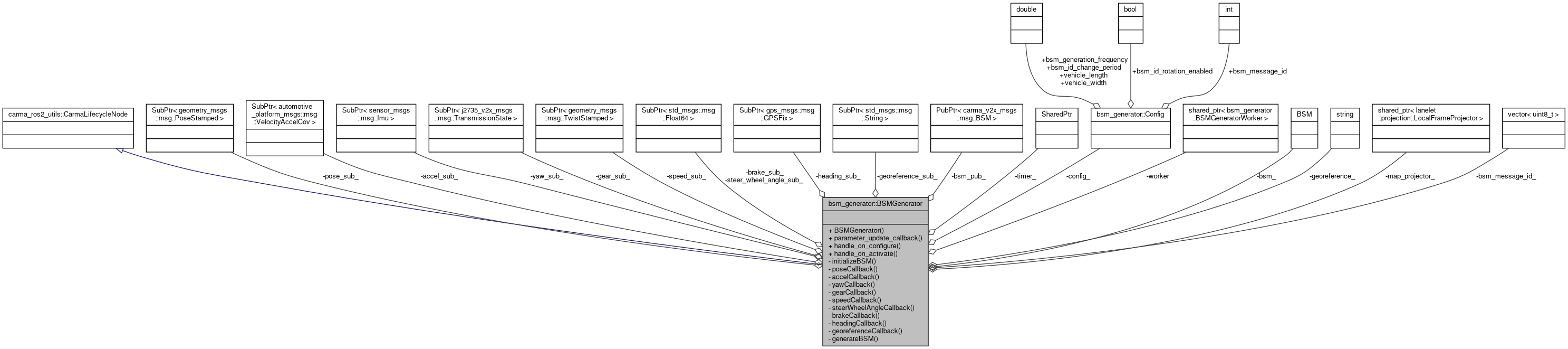
| carma_ros2_utils::SubPtr< geometry_msgs::msg::PoseStamped > | pose_sub_ |
| carma_ros2_utils::SubPtr< automotive_platform_msgs::msg::VelocityAccelCov > | accel_sub_ |
| carma_ros2_utils::SubPtr< sensor_msgs::msg::Imu > | yaw_sub_ |
| carma_ros2_utils::SubPtr< j2735_v2x_msgs::msg::TransmissionState > | gear_sub_ |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::TwistStamped > | speed_sub_ |
| carma_ros2_utils::SubPtr< std_msgs::msg::Float64 > | steer_wheel_angle_sub_ |
| carma_ros2_utils::SubPtr< std_msgs::msg::Float64 > | brake_sub_ |
| carma_ros2_utils::SubPtr< gps_msgs::msg::GPSFix > | heading_sub_ |
| carma_ros2_utils::SubPtr< std_msgs::msg::String > | georeference_sub_ |
| carma_ros2_utils::PubPtr< carma_v2x_msgs::msg::BSM > | bsm_pub_ |
| rclcpp::TimerBase::SharedPtr | timer_ |
| Config | config_ |
| std::shared_ptr< BSMGeneratorWorker > | worker |
| carma_v2x_msgs::msg::BSM | bsm_ |
| std::string | georeference_ {""} |
| std::shared_ptr< lanelet::projection::LocalFrameProjector > | map_projector_ |
| std::vector< uint8_t > | bsm_message_id_ |
Detailed Description
The class responsible for publishing BSM messages.
Definition at line 47 of file bsm_generator_node.hpp.
Constructor & Destructor Documentation
◆ BSMGenerator()
|
explicit |
BSMGenerator constructor.
Definition at line 22 of file bsm_generator_node.cpp.
References bsm_generator::Config::bsm_generation_frequency, bsm_generator::Config::bsm_id_change_period, bsm_generator::Config::bsm_id_rotation_enabled, bsm_generator::Config::bsm_message_id, config_, bsm_generator::Config::vehicle_length, and bsm_generator::Config::vehicle_width.
Member Function Documentation
◆ accelCallback()
|
private |
Callback to populate BSM message with longitudinal acceleration data.
- Parameters
-
msg Latest acceleration message
Definition at line 152 of file bsm_generator_node.cpp.
Referenced by handle_on_configure().

◆ brakeCallback()
|
private |
Callback to populate BSM message with vehicle applied brake status.
- Parameters
-
msg Latest brake status message
Definition at line 164 of file bsm_generator_node.cpp.
Referenced by handle_on_configure().

◆ gearCallback()
|
private |
Callback to populate BSM message with transmission state data.
- Parameters
-
msg Latest transmissio state message
Definition at line 141 of file bsm_generator_node.cpp.
References bsm_.
Referenced by handle_on_configure().

◆ generateBSM()
|
private |
Timer callback, which publishes a BSM.
Definition at line 196 of file bsm_generator_node.cpp.
References bsm_, bsm_generator::Config::bsm_id_change_period, bsm_generator::Config::bsm_id_rotation_enabled, bsm_generator::Config::bsm_message_id, bsm_pub_, config_, process_bag::i, and worker.
Referenced by handle_on_activate().

◆ georeferenceCallback()
|
private |
Callback for map projection string to define lat/lon -> map conversion.
- Parameters
-
msg The proj string defining the projection.
Definition at line 125 of file bsm_generator_node.cpp.
References georeference_, and map_projector_.
Referenced by handle_on_configure().

◆ handle_on_activate()
| carma_ros2_utils::CallbackReturn bsm_generator::BSMGenerator::handle_on_activate | ( | const rclcpp_lifecycle::State & | prev_state | ) |
Definition at line 105 of file bsm_generator_node.cpp.
References bsm_generator::Config::bsm_generation_frequency, config_, generateBSM(), and timer_.

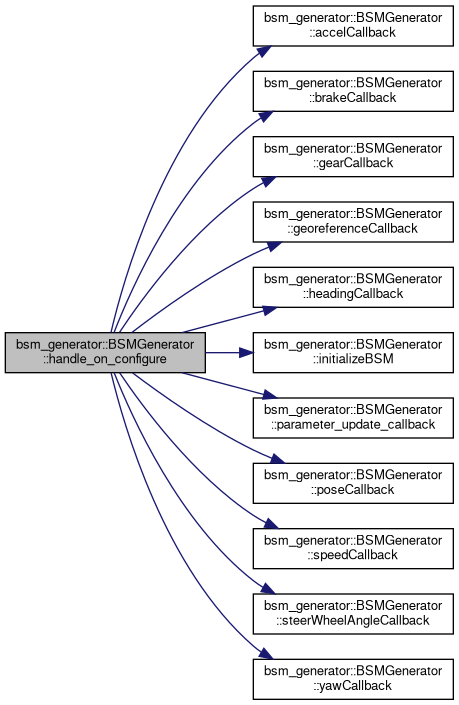
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn bsm_generator::BSMGenerator::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 55 of file bsm_generator_node.cpp.
References accel_sub_, accelCallback(), brake_sub_, brakeCallback(), bsm_generator::Config::bsm_generation_frequency, bsm_generator::Config::bsm_id_change_period, bsm_generator::Config::bsm_id_rotation_enabled, bsm_generator::Config::bsm_message_id, bsm_pub_, config_, gear_sub_, gearCallback(), georeference_sub_, georeferenceCallback(), initializeBSM(), parameter_update_callback(), pose_sub_, poseCallback(), speed_sub_, speedCallback(), steer_wheel_angle_sub_, steerWheelAngleCallback(), bsm_generator::Config::vehicle_length, bsm_generator::Config::vehicle_width, worker, yaw_sub_, and yawCallback().
◆ headingCallback()
|
private |
Callback to populate BSM message with vehicle heading data.
- Parameters
-
msg Latest GNSS message
Definition at line 190 of file bsm_generator_node.cpp.
◆ initializeBSM()
|
private |
Function to fill the BSM message with initial default data.
Definition at line 116 of file bsm_generator_node.cpp.
References bsm_, config_, bsm_generator::Config::vehicle_length, and bsm_generator::Config::vehicle_width.
Referenced by handle_on_configure().

◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult bsm_generator::BSMGenerator::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
Function callback for dynamic parameter updates.
Definition at line 37 of file bsm_generator_node.cpp.
References bsm_generator::Config::bsm_generation_frequency, bsm_generator::Config::bsm_id_change_period, bsm_generator::Config::bsm_id_rotation_enabled, bsm_generator::Config::bsm_message_id, config_, bsm_generator::Config::vehicle_length, and bsm_generator::Config::vehicle_width.
Referenced by handle_on_configure().

◆ poseCallback()
|
private |
Callback to populate BSM message with longitude, latitude, and elevation data.
- Parameters
-
msg Latest pose message
Definition at line 169 of file bsm_generator_node.cpp.
References bsm_, map_projector_, and worker.
Referenced by handle_on_configure().

◆ speedCallback()
|
private |
Callback to populate BSM message with vehicle speed data.
- Parameters
-
msg Latest speed message
Definition at line 135 of file bsm_generator_node.cpp.
Referenced by handle_on_configure().

◆ steerWheelAngleCallback()
|
private |
Callback to populate BSM message with vehicle steering wheel angle data.
- Parameters
-
msg Latest steering wheel angle message
Definition at line 146 of file bsm_generator_node.cpp.
Referenced by handle_on_configure().

◆ yawCallback()
|
private |
Callback to populate BSM message with yaw rate data.
- Parameters
-
msg Latest IMU message
Definition at line 158 of file bsm_generator_node.cpp.
Referenced by handle_on_configure().

Member Data Documentation
◆ accel_sub_
|
private |
Definition at line 53 of file bsm_generator_node.hpp.
Referenced by handle_on_configure().
◆ brake_sub_
|
private |
Definition at line 58 of file bsm_generator_node.hpp.
Referenced by handle_on_configure().
◆ bsm_
|
private |
Definition at line 75 of file bsm_generator_node.hpp.
Referenced by accelCallback(), brakeCallback(), gearCallback(), generateBSM(), headingCallback(), initializeBSM(), poseCallback(), speedCallback(), steerWheelAngleCallback(), and yawCallback().
◆ bsm_message_id_
|
private |
Definition at line 80 of file bsm_generator_node.hpp.
◆ bsm_pub_
|
private |
Definition at line 63 of file bsm_generator_node.hpp.
Referenced by generateBSM(), and handle_on_configure().
◆ config_
|
private |
Definition at line 69 of file bsm_generator_node.hpp.
Referenced by BSMGenerator(), generateBSM(), handle_on_activate(), handle_on_configure(), initializeBSM(), and parameter_update_callback().
◆ gear_sub_
|
private |
Definition at line 55 of file bsm_generator_node.hpp.
Referenced by handle_on_configure().
◆ georeference_
|
private |
Definition at line 77 of file bsm_generator_node.hpp.
Referenced by georeferenceCallback().
◆ georeference_sub_
|
private |
Definition at line 60 of file bsm_generator_node.hpp.
Referenced by handle_on_configure().
◆ heading_sub_
|
private |
Definition at line 59 of file bsm_generator_node.hpp.
◆ map_projector_
|
private |
Definition at line 78 of file bsm_generator_node.hpp.
Referenced by georeferenceCallback(), and poseCallback().
◆ pose_sub_
|
private |
Definition at line 52 of file bsm_generator_node.hpp.
Referenced by handle_on_configure().
◆ speed_sub_
|
private |
Definition at line 56 of file bsm_generator_node.hpp.
Referenced by handle_on_configure().
◆ steer_wheel_angle_sub_
|
private |
Definition at line 57 of file bsm_generator_node.hpp.
Referenced by handle_on_configure().
◆ timer_
|
private |
Definition at line 66 of file bsm_generator_node.hpp.
Referenced by handle_on_activate().
◆ worker
|
private |
Definition at line 72 of file bsm_generator_node.hpp.
Referenced by accelCallback(), brakeCallback(), generateBSM(), handle_on_configure(), headingCallback(), poseCallback(), speedCallback(), steerWheelAngleCallback(), and yawCallback().
◆ yaw_sub_
|
private |
Definition at line 54 of file bsm_generator_node.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- bsm_generator/include/bsm_generator/bsm_generator_node.hpp
- bsm_generator/src/bsm_generator_node.cpp