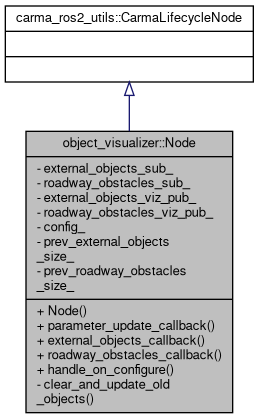
This node provides RViz visualization messages for recieved ExternalObject and RoadwayObstacle messages in carma-platform. More...
#include <object_visualizer_node.hpp>
Public Member Functions | |
| Node (const rclcpp::NodeOptions &) | |
| Node constructor. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| Example callback for dynamic parameter updates. More... | |
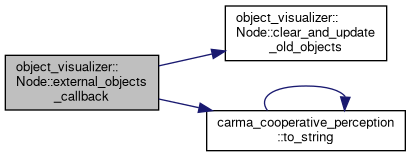
| void | external_objects_callback (carma_perception_msgs::msg::ExternalObjectList::UniquePtr msg) |
| External objects callback. Converts the message to a visualization message to republish. More... | |
| void | roadway_obstacles_callback (carma_perception_msgs::msg::RoadwayObstacleList::UniquePtr msg) |
| Roadway obstacles callback. Converts the message to a visualization message to republish. More... | |
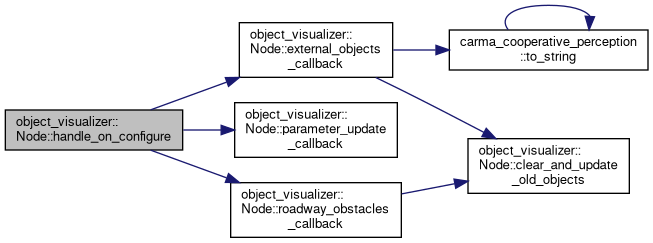
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
Private Member Functions | |
| void | createPedestrianMarker (visualization_msgs::msg::Marker &marker, const std_msgs::msg::Header &header, const geometry_msgs::msg::Pose &pose, size_t id, const std::string &ns, const geometry_msgs::msg::Vector3 &size) |
| Creates a pedestrian marker with specialized visualization. More... | |
| void | clear_and_update_old_objects (visualization_msgs::msg::MarkerArray &viz_msg, size_t &old_size) |
| Adds a marker deletion for a number of markers which is the delta between the new marker count and the previously published count. More... | |
Private Attributes | |
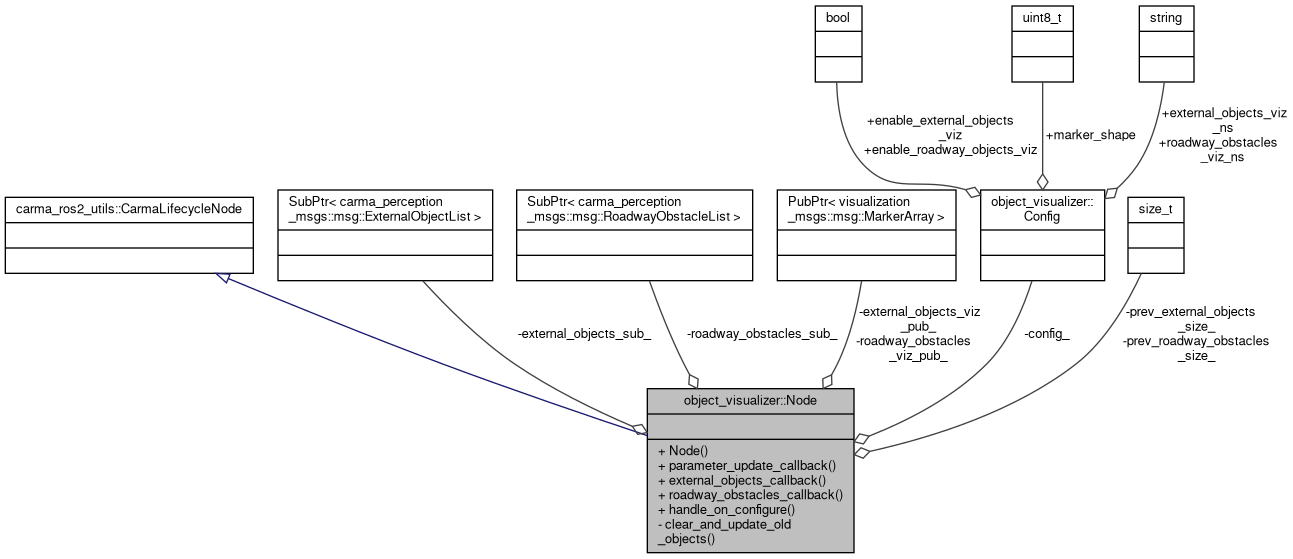
| carma_ros2_utils::SubPtr< carma_perception_msgs::msg::ExternalObjectList > | external_objects_sub_ |
| carma_ros2_utils::SubPtr< carma_perception_msgs::msg::RoadwayObstacleList > | roadway_obstacles_sub_ |
| carma_ros2_utils::PubPtr< visualization_msgs::msg::MarkerArray > | external_objects_viz_pub_ |
| carma_ros2_utils::PubPtr< visualization_msgs::msg::MarkerArray > | roadway_obstacles_viz_pub_ |
| Config | config_ |
| size_t | prev_external_objects_size_ = 0 |
| size_t | prev_roadway_obstacles_size_ = 0 |
Detailed Description
This node provides RViz visualization messages for recieved ExternalObject and RoadwayObstacle messages in carma-platform.
Definition at line 38 of file object_visualizer_node.hpp.
Constructor & Destructor Documentation
◆ Node()
|
explicit |
Node constructor.
Definition at line 22 of file object_visualizer_node.cpp.
References config_, object_visualizer::Config::enable_external_objects_viz, object_visualizer::Config::enable_roadway_objects_viz, object_visualizer::Config::external_objects_viz_ns, object_visualizer::Config::marker_shape, object_visualizer::Config::pedestrian_icon_path, object_visualizer::Config::pedestrian_icon_scale, object_visualizer::Config::roadway_obstacles_viz_ns, and object_visualizer::Config::use_pedestrian_icon.
Member Function Documentation
◆ clear_and_update_old_objects()
|
private |
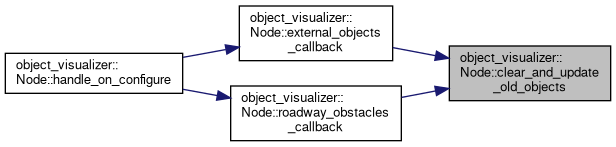
Adds a marker deletion for a number of markers which is the delta between the new marker count and the previously published count.
ASSUMPTION: The marker array's ids are already recomputed starting from zero, such that tracking ids is not needed.
- Parameters
-
[in/out] viz_msg The marker array to add deletion markers to [in/out] old_size The size of the previous published marker array. The positive delta between this and the size of the viz_msg determines the number of deletions added
Definition at line 220 of file object_visualizer_node.cpp.
References process_bag::i.
Referenced by external_objects_callback(), and roadway_obstacles_callback().
◆ createPedestrianMarker()
|
private |
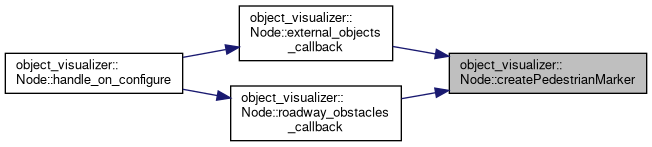
Creates a pedestrian marker with specialized visualization.
- Parameters
-
[out] marker The marker to be configured for pedestrian visualization [in] header The header to use for the marker [in] pose The pose to use for the marker [in] id The ID for the marker [in] ns The namespace for the marker [in] size The size vector for the pedestrian (x, y, z)
Definition at line 108 of file object_visualizer_node.cpp.
References config_, object_visualizer::Config::pedestrian_icon_path, object_visualizer::Config::pedestrian_icon_scale, and object_visualizer::Config::use_pedestrian_icon.
Referenced by external_objects_callback(), and roadway_obstacles_callback().
◆ external_objects_callback()
| void object_visualizer::Node::external_objects_callback | ( | carma_perception_msgs::msg::ExternalObjectList::UniquePtr | msg | ) |
External objects callback. Converts the message to a visualization message to republish.
- Parameters
-
msg The received message
Definition at line 155 of file object_visualizer_node.cpp.
References clear_and_update_old_objects(), config_, createPedestrianMarker(), object_visualizer::Config::enable_external_objects_viz, object_visualizer::Config::external_objects_viz_ns, external_objects_viz_pub_, object_visualizer::Config::marker_shape, prev_external_objects_size_, and carma_cooperative_perception::to_string().
Referenced by handle_on_configure().

◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn object_visualizer::Node::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 75 of file object_visualizer_node.cpp.
References config_, object_visualizer::Config::enable_external_objects_viz, object_visualizer::Config::enable_roadway_objects_viz, external_objects_callback(), external_objects_sub_, object_visualizer::Config::external_objects_viz_ns, external_objects_viz_pub_, object_visualizer::Config::marker_shape, parameter_update_callback(), object_visualizer::Config::pedestrian_icon_path, object_visualizer::Config::pedestrian_icon_scale, roadway_obstacles_callback(), roadway_obstacles_sub_, object_visualizer::Config::roadway_obstacles_viz_ns, roadway_obstacles_viz_pub_, and object_visualizer::Config::use_pedestrian_icon.
◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult object_visualizer::Node::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
Example callback for dynamic parameter updates.
Definition at line 41 of file object_visualizer_node.cpp.
References config_, object_visualizer::Config::enable_external_objects_viz, object_visualizer::Config::enable_roadway_objects_viz, object_visualizer::Config::external_objects_viz_ns, object_visualizer::Config::marker_shape, object_visualizer::Config::pedestrian_icon_path, object_visualizer::Config::pedestrian_icon_scale, object_visualizer::Config::roadway_obstacles_viz_ns, and object_visualizer::Config::use_pedestrian_icon.
Referenced by handle_on_configure().

◆ roadway_obstacles_callback()
| void object_visualizer::Node::roadway_obstacles_callback | ( | carma_perception_msgs::msg::RoadwayObstacleList::UniquePtr | msg | ) |
Roadway obstacles callback. Converts the message to a visualization message to republish.
- Parameters
-
msg The received message
Definition at line 237 of file object_visualizer_node.cpp.
References clear_and_update_old_objects(), config_, createPedestrianMarker(), object_visualizer::Config::enable_roadway_objects_viz, prev_roadway_obstacles_size_, object_visualizer::Config::roadway_obstacles_viz_ns, and roadway_obstacles_viz_pub_.
Referenced by handle_on_configure().


Member Data Documentation
◆ config_
|
private |
Definition at line 51 of file object_visualizer_node.hpp.
Referenced by Node(), createPedestrianMarker(), external_objects_callback(), handle_on_configure(), parameter_update_callback(), and roadway_obstacles_callback().
◆ external_objects_sub_
|
private |
Definition at line 43 of file object_visualizer_node.hpp.
Referenced by handle_on_configure().
◆ external_objects_viz_pub_
|
private |
Definition at line 47 of file object_visualizer_node.hpp.
Referenced by external_objects_callback(), and handle_on_configure().
◆ prev_external_objects_size_
|
private |
Definition at line 54 of file object_visualizer_node.hpp.
Referenced by external_objects_callback().
◆ prev_roadway_obstacles_size_
|
private |
Definition at line 55 of file object_visualizer_node.hpp.
Referenced by roadway_obstacles_callback().
◆ roadway_obstacles_sub_
|
private |
Definition at line 44 of file object_visualizer_node.hpp.
Referenced by handle_on_configure().
◆ roadway_obstacles_viz_pub_
|
private |
Definition at line 48 of file object_visualizer_node.hpp.
Referenced by handle_on_configure(), and roadway_obstacles_callback().
The documentation for this class was generated from the following files:
- object_visualizer/include/object_visualizer/object_visualizer_node.hpp
- object_visualizer/src/object_visualizer_node.cpp