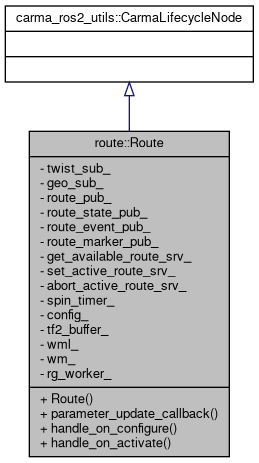
The route package provides the following functionality: More...
#include <route_node.hpp>
Public Member Functions | |
| Route (const rclcpp::NodeOptions &) | |
| Route constructor. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| Function callback for dynamic parameter updates. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) |
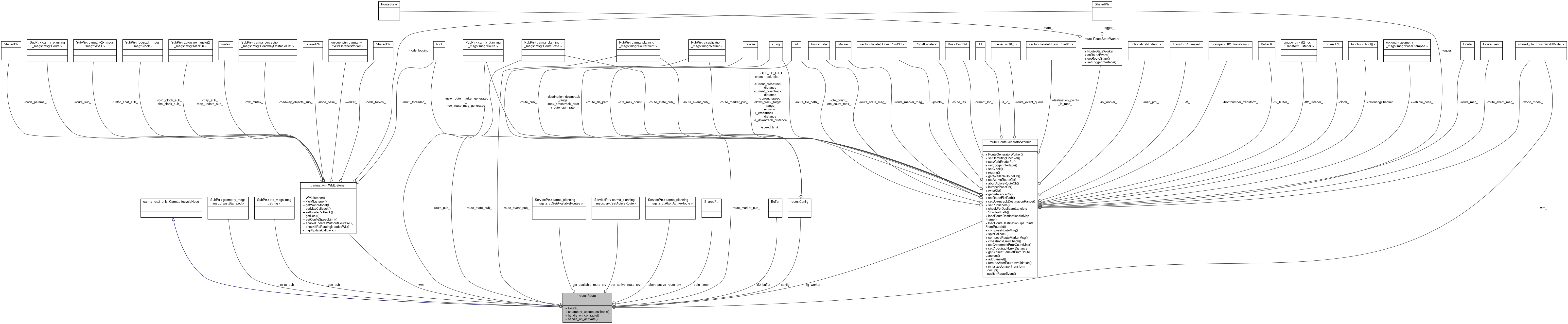
Private Attributes | |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::TwistStamped > | twist_sub_ |
| carma_ros2_utils::SubPtr< std_msgs::msg::String > | geo_sub_ |
| carma_ros2_utils::PubPtr< carma_planning_msgs::msg::Route > | route_pub_ |
| carma_ros2_utils::PubPtr< carma_planning_msgs::msg::RouteState > | route_state_pub_ |
| carma_ros2_utils::PubPtr< carma_planning_msgs::msg::RouteEvent > | route_event_pub_ |
| carma_ros2_utils::PubPtr< visualization_msgs::msg::Marker > | route_marker_pub_ |
| carma_ros2_utils::ServicePtr< carma_planning_msgs::srv::GetAvailableRoutes > | get_available_route_srv_ |
| carma_ros2_utils::ServicePtr< carma_planning_msgs::srv::SetActiveRoute > | set_active_route_srv_ |
| carma_ros2_utils::ServicePtr< carma_planning_msgs::srv::AbortActiveRoute > | abort_active_route_srv_ |
| rclcpp::TimerBase::SharedPtr | spin_timer_ |
| Config | config_ |
| tf2_ros::Buffer | tf2_buffer_ |
| carma_wm::WMListener | wml_ |
| carma_wm::WorldModelConstPtr | wm_ |
| RouteGeneratorWorker | rg_worker_ |
Detailed Description
The route package provides the following functionality:
- Route generation which provides the list of available routes and provides vehicle travel route description and management.
- Route state management which provides the current state of the route following, including tracking vehicle cross track and down track distances along the active route
Definition at line 50 of file route_node.hpp.
Constructor & Destructor Documentation
◆ Route()
|
explicit |
Route constructor.
Definition at line 22 of file route_node.cpp.
References config_, route::Config::cte_max_count, route::Config::destination_downtrack_range, route::Config::max_crosstrack_error, route::Config::route_file_path, and route::Config::route_spin_rate.
Member Function Documentation
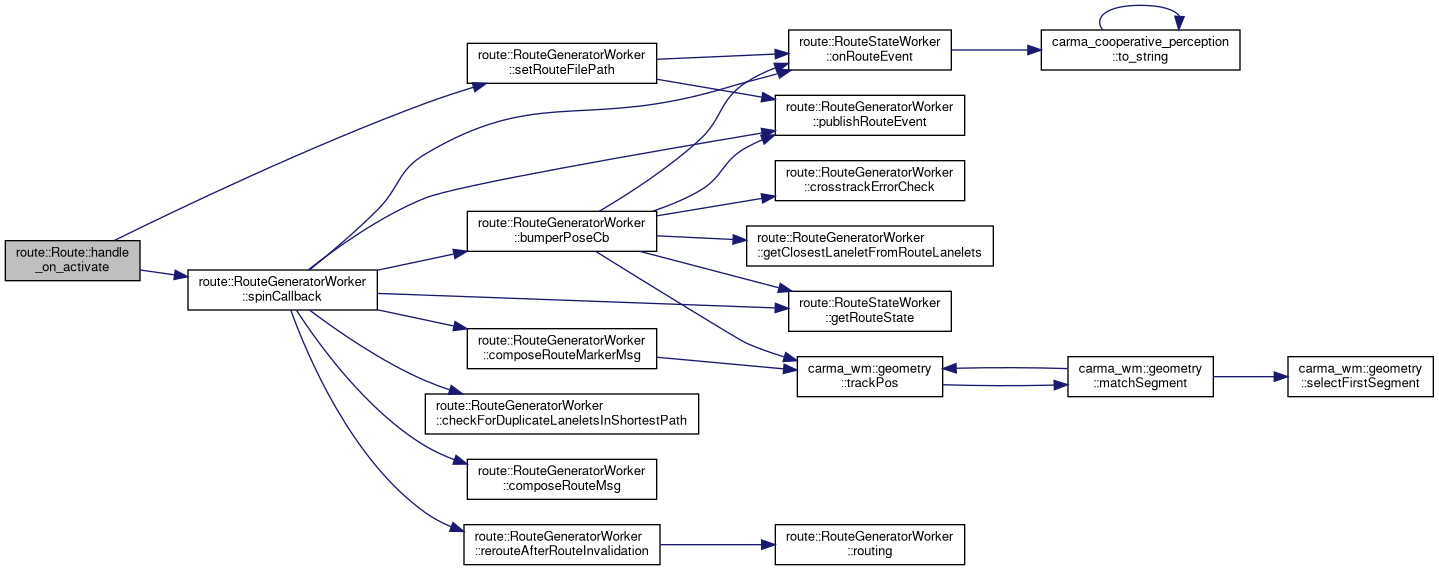
◆ handle_on_activate()
| carma_ros2_utils::CallbackReturn route::Route::handle_on_activate | ( | const rclcpp_lifecycle::State & | prev_state | ) |
Definition at line 124 of file route_node.cpp.
References config_, create_two_lane_map::int, rg_worker_, route::Config::route_file_path, route::Config::route_spin_rate, route::RouteGeneratorWorker::setRouteFilePath(), spin_timer_, and route::RouteGeneratorWorker::spinCallback().
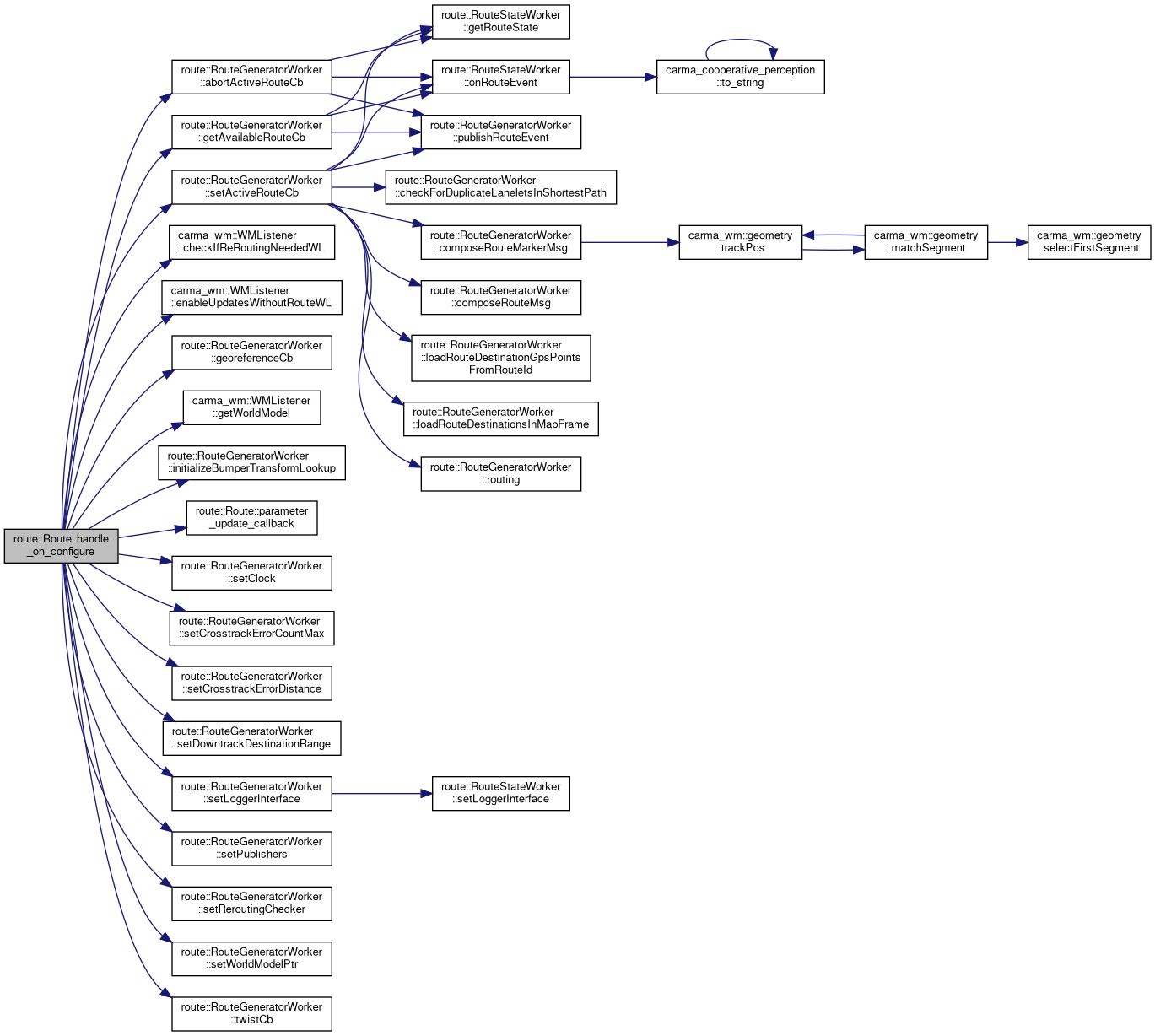
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn route::Route::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 56 of file route_node.cpp.
References abort_active_route_srv_, route::RouteGeneratorWorker::abortActiveRouteCb(), carma_wm::WMListener::checkIfReRoutingNeededWL(), config_, route::Config::cte_max_count, route::Config::destination_downtrack_range, carma_wm::WMListener::enableUpdatesWithoutRouteWL(), geo_sub_, route::RouteGeneratorWorker::georeferenceCb(), get_available_route_srv_, route::RouteGeneratorWorker::getAvailableRouteCb(), carma_wm::WMListener::getWorldModel(), route::RouteGeneratorWorker::initializeBumperTransformLookup(), route::Config::max_crosstrack_error, parameter_update_callback(), rg_worker_, route_event_pub_, route::Config::route_file_path, route_marker_pub_, route_pub_, route::Config::route_spin_rate, route_state_pub_, set_active_route_srv_, route::RouteGeneratorWorker::setActiveRouteCb(), route::RouteGeneratorWorker::setClock(), route::RouteGeneratorWorker::setCrosstrackErrorCountMax(), route::RouteGeneratorWorker::setCrosstrackErrorDistance(), route::RouteGeneratorWorker::setDowntrackDestinationRange(), route::RouteGeneratorWorker::setLoggerInterface(), route::RouteGeneratorWorker::setPublishers(), route::RouteGeneratorWorker::setReroutingChecker(), route::RouteGeneratorWorker::setWorldModelPtr(), twist_sub_, route::RouteGeneratorWorker::twistCb(), wm_, and wml_.
◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult route::Route::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
Function callback for dynamic parameter updates.
Definition at line 40 of file route_node.cpp.
References config_, route::Config::cte_max_count, route::Config::destination_downtrack_range, route::Config::max_crosstrack_error, route::Config::route_file_path, and route::Config::route_spin_rate.
Referenced by handle_on_configure().

Member Data Documentation
◆ abort_active_route_srv_
|
private |
Definition at line 67 of file route_node.hpp.
Referenced by handle_on_configure().
◆ config_
|
private |
Definition at line 73 of file route_node.hpp.
Referenced by Route(), handle_on_activate(), handle_on_configure(), and parameter_update_callback().
◆ geo_sub_
|
private |
Definition at line 56 of file route_node.hpp.
Referenced by handle_on_configure().
◆ get_available_route_srv_
|
private |
Definition at line 65 of file route_node.hpp.
Referenced by handle_on_configure().
◆ rg_worker_
|
private |
Definition at line 83 of file route_node.hpp.
Referenced by handle_on_activate(), and handle_on_configure().
◆ route_event_pub_
|
private |
Definition at line 61 of file route_node.hpp.
Referenced by handle_on_configure().
◆ route_marker_pub_
|
private |
Definition at line 62 of file route_node.hpp.
Referenced by handle_on_configure().
◆ route_pub_
|
private |
Definition at line 59 of file route_node.hpp.
Referenced by handle_on_configure().
◆ route_state_pub_
|
private |
Definition at line 60 of file route_node.hpp.
Referenced by handle_on_configure().
◆ set_active_route_srv_
|
private |
Definition at line 66 of file route_node.hpp.
Referenced by handle_on_configure().
◆ spin_timer_
|
private |
Definition at line 70 of file route_node.hpp.
Referenced by handle_on_activate().
◆ tf2_buffer_
|
private |
Definition at line 76 of file route_node.hpp.
◆ twist_sub_
|
private |
Definition at line 55 of file route_node.hpp.
Referenced by handle_on_configure().
◆ wm_
|
private |
Definition at line 80 of file route_node.hpp.
Referenced by handle_on_configure().
◆ wml_
|
private |
Definition at line 79 of file route_node.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- route/include/route/route_node.hpp
- route/src/route_node.cpp