#include <route_generator_worker.hpp>
Public Member Functions | |
| RouteGeneratorWorker (tf2_ros::Buffer &tf2_buffer) | |
| Constructor for RouteGeneratorWorker class taking in dependencies via dependency injection. More... | |
| void | setReroutingChecker (const std::function< bool()> inputFunction) |
| setReroutingChecker function to set the rerouting flag More... | |
| void | setWorldModelPtr (carma_wm::WorldModelConstPtr wm) |
| Dependency injection for world model pointer. More... | |
| void | setLoggerInterface (rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr logger) |
| Dependency injection for logger interface. More... | |
| void | setClock (rclcpp::Clock::SharedPtr clock) |
| Dependency injection for clock object. More... | |
| lanelet::Optional< lanelet::routing::Route > | routing (const lanelet::BasicPoint2d start, const std::vector< lanelet::BasicPoint2d > &via, const lanelet::BasicPoint2d end, const lanelet::LaneletMapConstPtr map_pointer, const carma_wm::LaneletRoutingGraphConstPtr graph_pointer) const |
| Generate Lanelet2 route based on input destinations. More... | |
| bool | getAvailableRouteCb (const std::shared_ptr< rmw_request_id_t >, const std::shared_ptr< carma_planning_msgs::srv::GetAvailableRoutes::Request >, std::shared_ptr< carma_planning_msgs::srv::GetAvailableRoutes::Response > resp) |
| Get_available_route service callback. Calls to this service will respond with a list of route names for user to select. More... | |
| bool | setActiveRouteCb (const std::shared_ptr< rmw_request_id_t >, const std::shared_ptr< carma_planning_msgs::srv::SetActiveRoute::Request > req, std::shared_ptr< carma_planning_msgs::srv::SetActiveRoute::Response > resp) |
| Set_active_route service callback. User can select a route to start following by calling this service. More... | |
| bool | abortActiveRouteCb (const std::shared_ptr< rmw_request_id_t >, const std::shared_ptr< carma_planning_msgs::srv::AbortActiveRoute::Request >, std::shared_ptr< carma_planning_msgs::srv::AbortActiveRoute::Response > resp) |
| Abort_active_route service callback. User can call this service to abort a current following route and return to route selection stage. More... | |
| void | bumperPoseCb () |
| Callback for the front bumper pose transform. More... | |
| void | twistCb (geometry_msgs::msg::TwistStamped::UniquePtr msg) |
| Callback for the twist subscriber, which will store latest twist locally. More... | |
| void | georeferenceCb (std_msgs::msg::String::UniquePtr msg) |
| Callback for the georeference subscriber used to set the map projection. More... | |
| void | setRouteFilePath (const std::string &path) |
| Set method for configurable parameter. More... | |
| void | setDowntrackDestinationRange (double dt_dest_range) |
| Set method for configurable parameter. More... | |
| void | setPublishers (const carma_ros2_utils::PubPtr< carma_planning_msgs::msg::RouteEvent > &route_event_pub, const carma_ros2_utils::PubPtr< carma_planning_msgs::msg::RouteState > &route_state_pub, const carma_ros2_utils::PubPtr< carma_planning_msgs::msg::Route > &route_pub, const carma_ros2_utils::PubPtr< visualization_msgs::msg::Marker > &route_marker_pub) |
| Method to pass publishers into worker class. More... | |
| bool | checkForDuplicateLaneletsInShortestPath (const lanelet::routing::Route &route) const |
| Helper function to check whether a route's shortest path contains any duplicate Lanelet IDs. 'true' indicates that the route's shortest path contains duplicate Lanelet IDs. More... | |
| std::vector< lanelet::BasicPoint3d > | loadRouteDestinationsInMapFrame (const std::vector< carma_v2x_msgs::msg::Position3D > &destinations) const |
| Function to take route destination points from a vector of 3D points and convert them from lat/lon values to to coordinates in map frame based on the projection string. More... | |
| std::vector< carma_v2x_msgs::msg::Position3D > | loadRouteDestinationGpsPointsFromRouteId (const std::string &route_id) const |
| Function to load route destination points from a route file and store them in a vector of 3D points. More... | |
| carma_planning_msgs::msg::Route | composeRouteMsg (const lanelet::Optional< lanelet::routing::Route > &route) const |
| Helper function to generate a CARMA route message based on planned lanelet route. More... | |
| bool | spinCallback () |
| Spin callback which will be called frequently based on spin rate. More... | |
| visualization_msgs::msg::Marker | composeRouteMarkerMsg (const lanelet::Optional< lanelet::routing::Route > &route) |
| composeRouteMarkerMsg is a function to generate route rviz markers More... | |
| bool | crosstrackErrorCheck (const std::shared_ptr< geometry_msgs::msg::PoseStamped > &msg, lanelet::ConstLanelet current_llt) |
| crosstrackErrorCheck is a function that determines when the vehicle has left the route and reports when a crosstrack error has taken place More... | |
| void | setCrosstrackErrorCountMax (int cte_max) |
| set the crosstrack error counter maximum limit More... | |
| void | setCrosstrackErrorDistance (double cte_dist) |
| set the maximum crosstrack error distance More... | |
| lanelet::ConstLanelet | getClosestLaneletFromRouteLanelets (lanelet::BasicPoint2d position) const |
| "Get the closest lanelet on the route relative to the vehicle's current position. If the input list does not contain lanelets on the route, still closest lanelet from the route will be returned More... | |
| void | addLanelet (lanelet::ConstLanelet llt) |
| lanelet::Optional< lanelet::routing::Route > | rerouteAfterRouteInvalidation (const std::vector< lanelet::BasicPoint2d > &destination_points_in_map) |
| After route is invalidated, this function returns a new route based on the destinations points. More... | |
| void | initializeBumperTransformLookup () |
| Initialize transform lookup from front bumper to map. More... | |
Public Attributes | |
| std::function< bool()> | reroutingChecker |
| reroutingChecker function to set the rerouting flag locally More... | |
| boost::optional< geometry_msgs::msg::PoseStamped > | vehicle_pose_ |
Private Member Functions | |
| void | publishRouteEvent (uint8_t event_type) |
Private Attributes | |
| const double | DEG_TO_RAD = 0.0174533 |
| RouteStateWorker | rs_worker_ |
| std::string | route_file_path_ |
| carma_wm::WorldModelConstPtr | world_model_ |
| carma_planning_msgs::msg::Route | route_msg_ |
| carma_planning_msgs::msg::RouteEvent | route_event_msg_ |
| carma_planning_msgs::msg::RouteState | route_state_msg_ |
| visualization_msgs::msg::Marker | route_marker_msg_ |
| std::vector< lanelet::ConstPoint3d > | points_ |
| lanelet::ConstLanelets | route_llts |
| double | down_track_target_range_ |
| double | current_crosstrack_distance_ |
| double | current_downtrack_distance_ |
| lanelet::BasicPoint2d | current_loc_ |
| double | ll_crosstrack_distance_ |
| double | ll_downtrack_distance_ |
| lanelet::Id | ll_id_ |
| double | speed_limit_ = 0 |
| double | current_speed_ = 0 |
| carma_ros2_utils::PubPtr< carma_planning_msgs::msg::RouteEvent > | route_event_pub_ |
| carma_ros2_utils::PubPtr< carma_planning_msgs::msg::RouteState > | route_state_pub_ |
| carma_ros2_utils::PubPtr< carma_planning_msgs::msg::Route > | route_pub_ |
| carma_ros2_utils::PubPtr< visualization_msgs::msg::Marker > | route_marker_pub_ |
| bool | new_route_msg_generated_ = false |
| bool | new_route_marker_generated_ = false |
| std::queue< uint8_t > | route_event_queue |
| double | cross_track_dist_ |
| int | cte_count_ = 0 |
| int | cte_count_max_ |
| std::vector< lanelet::BasicPoint2d > | destination_points_in_map_ |
| boost::optional< std::string > | map_proj_ |
| geometry_msgs::msg::TransformStamped | tf_ |
| tf2::Stamped< tf2::Transform > | frontbumper_transform_ |
| tf2_ros::Buffer & | tf2_buffer_ |
| std::unique_ptr< tf2_ros::TransformListener > | tf2_listener_ |
| rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr | logger_ |
| rclcpp::Clock::SharedPtr | clock_ |
Static Private Attributes | |
| static constexpr double | epsilon_ = 0.001 |
Detailed Description
Definition at line 58 of file route_generator_worker.hpp.
Constructor & Destructor Documentation
◆ RouteGeneratorWorker()
| route::RouteGeneratorWorker::RouteGeneratorWorker | ( | tf2_ros::Buffer & | tf2_buffer | ) |
Constructor for RouteGeneratorWorker class taking in dependencies via dependency injection.
Definition at line 21 of file route_generator_worker.cpp.
Member Function Documentation
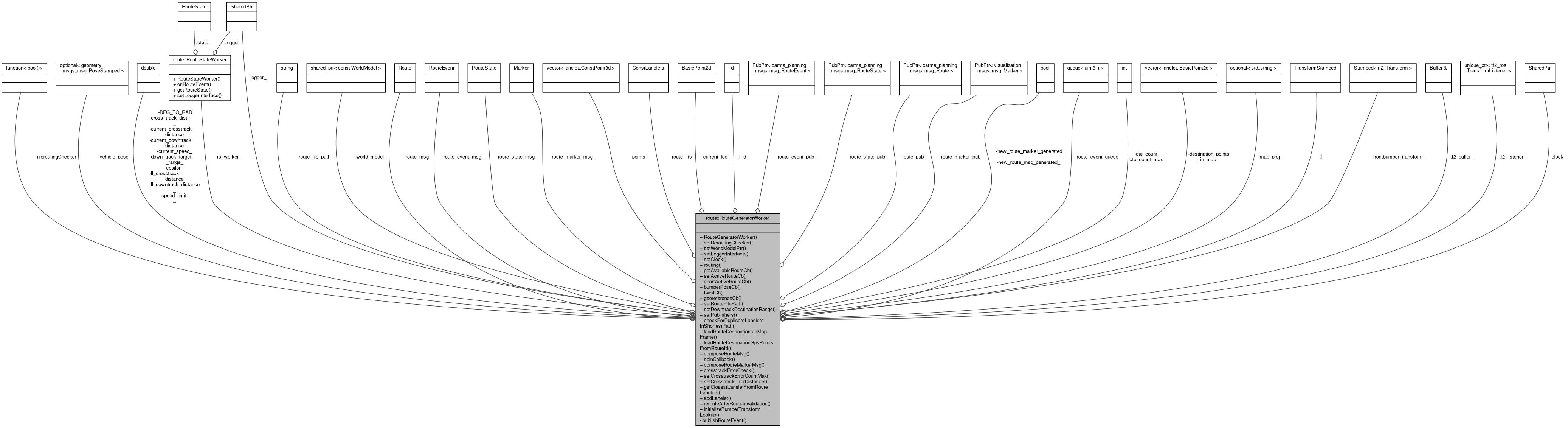
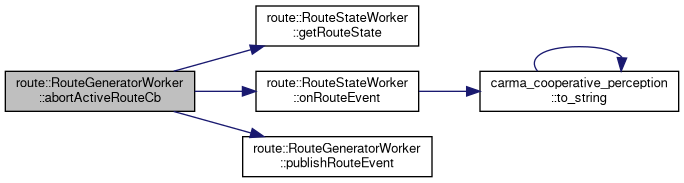
◆ abortActiveRouteCb()
| bool route::RouteGeneratorWorker::abortActiveRouteCb | ( | const std::shared_ptr< rmw_request_id_t > | , |
| const std::shared_ptr< carma_planning_msgs::srv::AbortActiveRoute::Request > | , | ||
| std::shared_ptr< carma_planning_msgs::srv::AbortActiveRoute::Response > | resp | ||
| ) |
Abort_active_route service callback. User can call this service to abort a current following route and return to route selection stage.
- Parameters
-
req A carma_planning_msgs::srv::AbortActiveRoute::Request msg which contains the route name user wants to stop following resp A carma_planning_msgs::srv::AbortActiveRoute::Response msg contains error status showing if there is an active route
Definition at line 470 of file route_generator_worker.cpp.
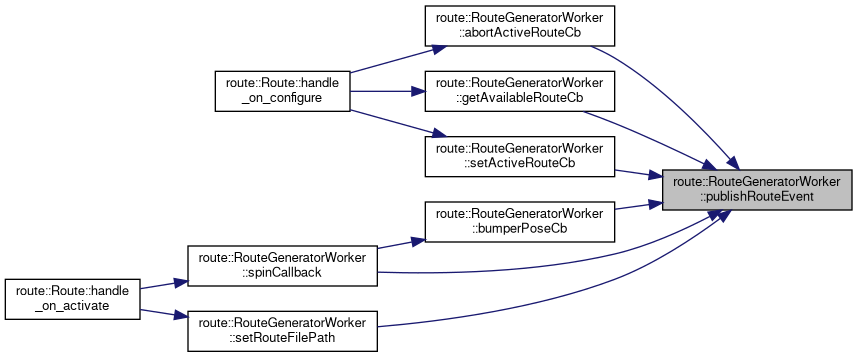
References route::FOLLOWING, route::RouteStateWorker::getRouteState(), route::RouteStateWorker::onRouteEvent(), publishRouteEvent(), route::ROUTE_ABORTED, route_msg_, and rs_worker_.
Referenced by route::Route::handle_on_configure().

◆ addLanelet()
| void route::RouteGeneratorWorker::addLanelet | ( | lanelet::ConstLanelet | llt | ) |
Definition at line 780 of file route_generator_worker.cpp.
References route_llts.
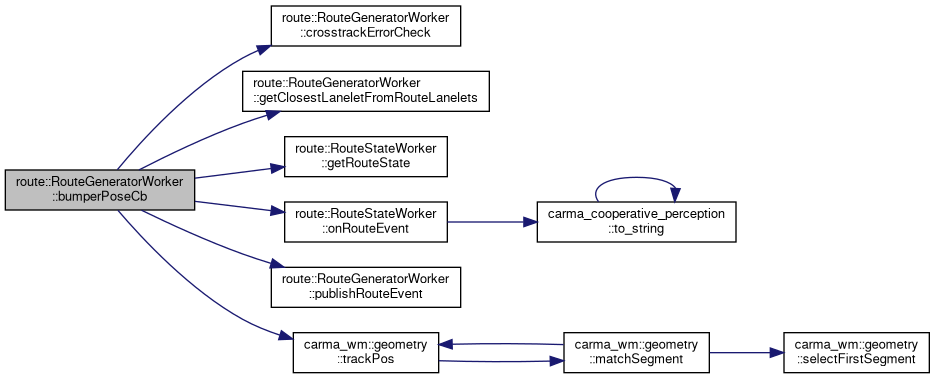
◆ bumperPoseCb()
| void route::RouteGeneratorWorker::bumperPoseCb | ( | ) |
Callback for the front bumper pose transform.
Definition at line 494 of file route_generator_worker.cpp.
References carma_wm::TrackPos::crosstrack, crosstrackErrorCheck(), current_crosstrack_distance_, current_downtrack_distance_, current_loc_, current_speed_, down_track_target_range_, carma_wm::TrackPos::downtrack, epsilon_, route::FOLLOWING, frontbumper_transform_, getClosestLaneletFromRouteLanelets(), route::RouteStateWorker::getRouteState(), ll_crosstrack_distance_, ll_downtrack_distance_, ll_id_, logger_, route::RouteStateWorker::onRouteEvent(), publishRouteEvent(), route::ROUTE_COMPLETED, route::ROUTE_DEPARTED, route_msg_, rs_worker_, speed_limit_, tf2_buffer_, tf_, carma_wm::geometry::trackPos(), vehicle_pose_, and world_model_.
Referenced by spinCallback().

◆ checkForDuplicateLaneletsInShortestPath()
| bool route::RouteGeneratorWorker::checkForDuplicateLaneletsInShortestPath | ( | const lanelet::routing::Route & | route | ) | const |
Helper function to check whether a route's shortest path contains any duplicate Lanelet IDs. 'true' indicates that the route's shortest path contains duplicate Lanelet IDs.
- Parameters
-
route Route object from lanelet2 lib routing function
Definition at line 296 of file route_generator_worker.cpp.
Referenced by setActiveRouteCb(), and spinCallback().

◆ composeRouteMarkerMsg()
| visualization_msgs::msg::Marker route::RouteGeneratorWorker::composeRouteMarkerMsg | ( | const lanelet::Optional< lanelet::routing::Route > & | route | ) |
composeRouteMarkerMsg is a function to generate route rviz markers
- Parameters
-
route Route object from lanelet2 lib routing function
Definition at line 384 of file route_generator_worker.cpp.
References carma_wm::TrackPos::downtrack, process_bag::i, create_two_lane_map::int, logger_, new_route_marker_generated_, route_marker_msg_, and carma_wm::geometry::trackPos().
Referenced by setActiveRouteCb(), and spinCallback().


◆ composeRouteMsg()
| carma_planning_msgs::msg::Route route::RouteGeneratorWorker::composeRouteMsg | ( | const lanelet::Optional< lanelet::routing::Route > & | route | ) | const |
Helper function to generate a CARMA route message based on planned lanelet route.
- Parameters
-
route Route object from lanelet2 lib routing function
Definition at line 450 of file route_generator_worker.cpp.
Referenced by setActiveRouteCb(), and spinCallback().

◆ crosstrackErrorCheck()
| bool route::RouteGeneratorWorker::crosstrackErrorCheck | ( | const std::shared_ptr< geometry_msgs::msg::PoseStamped > & | msg, |
| lanelet::ConstLanelet | current_llt | ||
| ) |
crosstrackErrorCheck is a function that determines when the vehicle has left the route and reports when a crosstrack error has taken place
- Parameters
-
msg Msg that contains the vehicle's current position current_llt The lanelet that the vehicle is currently in
Definition at line 714 of file route_generator_worker.cpp.
References cross_track_dist_, cte_count_, cte_count_max_, and logger_.
Referenced by bumperPoseCb().

◆ georeferenceCb()
| void route::RouteGeneratorWorker::georeferenceCb | ( | std_msgs::msg::String::UniquePtr | msg | ) |
Callback for the georeference subscriber used to set the map projection.
- Parameters
-
msg The latest georeference
Definition at line 582 of file route_generator_worker.cpp.
References map_proj_.
Referenced by route::Route::handle_on_configure().

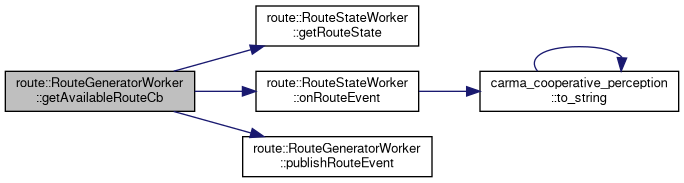
◆ getAvailableRouteCb()
| bool route::RouteGeneratorWorker::getAvailableRouteCb | ( | const std::shared_ptr< rmw_request_id_t > | , |
| const std::shared_ptr< carma_planning_msgs::srv::GetAvailableRoutes::Request > | , | ||
| std::shared_ptr< carma_planning_msgs::srv::GetAvailableRoutes::Response > | resp | ||
| ) |
Get_available_route service callback. Calls to this service will respond with a list of route names for user to select.
- Parameters
-
req An empty carma_planning_msgs::srv::GetAvailableRoutes::Request resp A carma_planning_msgs::srv::GetAvailableRoutes::Response msg contains a list of empty Route messages with only route name populated
Definition at line 76 of file route_generator_worker.cpp.
References route::RouteStateWorker::getRouteState(), route::LOADING, logger_, route::RouteStateWorker::onRouteEvent(), publishRouteEvent(), route_file_path_, route::ROUTE_LOADED, and rs_worker_.
Referenced by route::Route::handle_on_configure().

◆ getClosestLaneletFromRouteLanelets()
| lanelet::ConstLanelet route::RouteGeneratorWorker::getClosestLaneletFromRouteLanelets | ( | lanelet::BasicPoint2d | position | ) | const |
"Get the closest lanelet on the route relative to the vehicle's current position. If the input list does not contain lanelets on the route, still closest lanelet from the route will be returned
- Parameters
-
position the current position of the vehicle
Definition at line 753 of file route_generator_worker.cpp.
References process_bag::i, and route_llts.
Referenced by bumperPoseCb().

◆ initializeBumperTransformLookup()
| void route::RouteGeneratorWorker::initializeBumperTransformLookup | ( | ) |
Initialize transform lookup from front bumper to map.
Definition at line 488 of file route_generator_worker.cpp.
References tf2_buffer_, and tf2_listener_.
Referenced by route::Route::handle_on_configure().

◆ loadRouteDestinationGpsPointsFromRouteId()
| std::vector< carma_v2x_msgs::msg::Position3D > route::RouteGeneratorWorker::loadRouteDestinationGpsPointsFromRouteId | ( | const std::string & | route_id | ) | const |
Function to load route destination points from a route file and store them in a vector of 3D points.
- Parameters
-
route_id This function will read the route file with provided route_id
Definition at line 351 of file route_generator_worker.cpp.
References route_file_path_.
Referenced by setActiveRouteCb().

◆ loadRouteDestinationsInMapFrame()
| std::vector< lanelet::BasicPoint3d > route::RouteGeneratorWorker::loadRouteDestinationsInMapFrame | ( | const std::vector< carma_v2x_msgs::msg::Position3D > & | destinations | ) | const |
Function to take route destination points from a vector of 3D points and convert them from lat/lon values to to coordinates in map frame based on the projection string.
- Parameters
-
destinations A vector of carma_v2x_msgs::msg::Position3D points containing destination points provided as lat/long values
Definition at line 320 of file route_generator_worker.cpp.
References map_proj_.
Referenced by setActiveRouteCb().

◆ publishRouteEvent()
|
private |
Definition at line 603 of file route_generator_worker.cpp.
References route_event_queue.
Referenced by abortActiveRouteCb(), bumperPoseCb(), getAvailableRouteCb(), setActiveRouteCb(), setRouteFilePath(), and spinCallback().
◆ rerouteAfterRouteInvalidation()
| lanelet::Optional< lanelet::routing::Route > route::RouteGeneratorWorker::rerouteAfterRouteInvalidation | ( | const std::vector< lanelet::BasicPoint2d > & | destination_points_in_map | ) |
After route is invalidated, this function returns a new route based on the destinations points.
- Parameters
-
destination_points_in_map vector of destination points
- Note
- Destination points will be removed if the current pose is past those points.
Definition at line 608 of file route_generator_worker.cpp.
References current_downtrack_distance_, current_loc_, destination_points_in_map_, process_bag::i, logger_, routing(), and world_model_.
Referenced by spinCallback().


◆ routing()
| lanelet::Optional< lanelet::routing::Route > route::RouteGeneratorWorker::routing | ( | const lanelet::BasicPoint2d | start, |
| const std::vector< lanelet::BasicPoint2d > & | via, | ||
| const lanelet::BasicPoint2d | end, | ||
| const lanelet::LaneletMapConstPtr | map_pointer, | ||
| const carma_wm::LaneletRoutingGraphConstPtr | graph_pointer | ||
| ) | const |
Generate Lanelet2 route based on input destinations.
- Parameters
-
start Lanelet 2D point in map frame indicates the starting point of selected route via A vector of lanelet 2D points in map frame which contains points we want to visit along the route end Lanelet 2D point in map frame indicates the final destination of selected route map_pointer A constant pointer to lanelet vector map graph_pointer A constant pointer to lanelet vector map routing graph
Definition at line 40 of file route_generator_worker.cpp.
References logger_, and process_traj_logs::point.
Referenced by rerouteAfterRouteInvalidation(), and setActiveRouteCb().

◆ setActiveRouteCb()
| bool route::RouteGeneratorWorker::setActiveRouteCb | ( | const std::shared_ptr< rmw_request_id_t > | , |
| const std::shared_ptr< carma_planning_msgs::srv::SetActiveRoute::Request > | req, | ||
| std::shared_ptr< carma_planning_msgs::srv::SetActiveRoute::Response > | resp | ||
| ) |
Set_active_route service callback. User can select a route to start following by calling this service.
- Parameters
-
req A carma_planning_msgs::srv::SetActiveRoute::Request msg which contains either a route name a user wants to select or an array of carma_v2x_msgs::msg::Position3D destination points to generate a route from. resp A carma_planning_msgs::srv::SetActiveRoute::Response msg contains error status indicating whether the routing succeeded
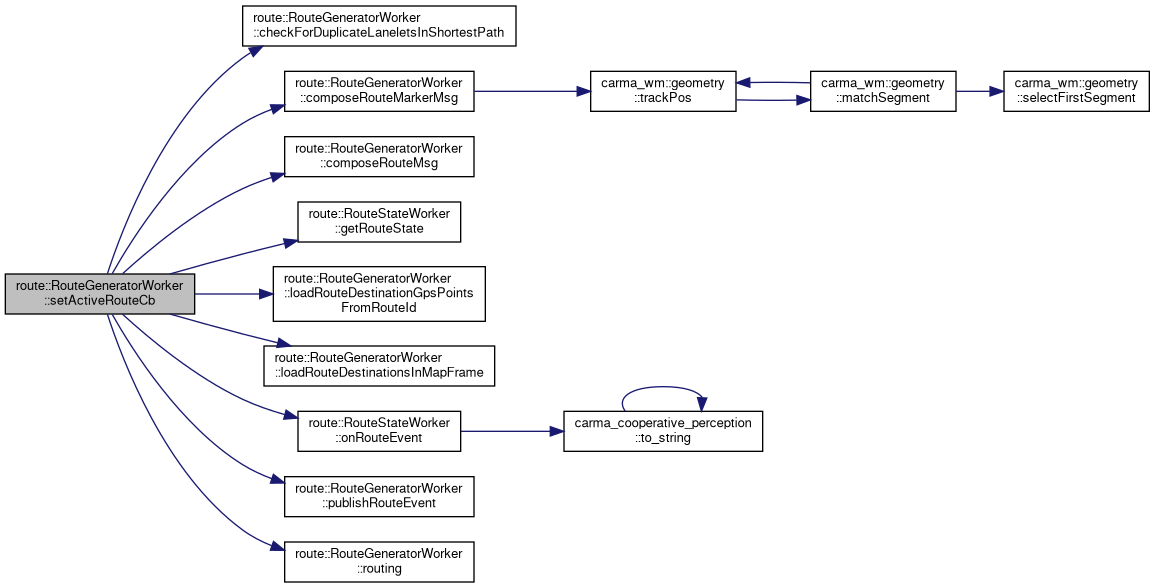
Definition at line 150 of file route_generator_worker.cpp.
References checkForDuplicateLaneletsInShortestPath(), clock_, composeRouteMarkerMsg(), composeRouteMsg(), destination_points_in_map_, route::RouteStateWorker::getRouteState(), loadRouteDestinationGpsPointsFromRouteId(), loadRouteDestinationsInMapFrame(), logger_, map_proj_, new_route_msg_generated_, route::RouteStateWorker::onRouteEvent(), publishRouteEvent(), route::ROUTE_GEN_FAILED, route_llts, route_marker_msg_, route_msg_, route::ROUTE_SELECTED, route::ROUTE_STARTED, routing(), rs_worker_, route::SELECTION, vehicle_pose_, and world_model_.
Referenced by route::Route::handle_on_configure().

◆ setClock()
| void route::RouteGeneratorWorker::setClock | ( | rclcpp::Clock::SharedPtr | clock | ) |
Dependency injection for clock object.
- Parameters
-
clock Clock object that will be used by worker class
Definition at line 35 of file route_generator_worker.cpp.
References clock_.
Referenced by route::Route::handle_on_configure().

◆ setCrosstrackErrorCountMax()
| void route::RouteGeneratorWorker::setCrosstrackErrorCountMax | ( | int | cte_max | ) |
set the crosstrack error counter maximum limit
- Parameters
-
cte_max the maximum amount of acceptable crosstrack error instances
Definition at line 774 of file route_generator_worker.cpp.
References cte_count_max_.
Referenced by route::Route::handle_on_configure().

◆ setCrosstrackErrorDistance()
| void route::RouteGeneratorWorker::setCrosstrackErrorDistance | ( | double | cte_dist | ) |
set the maximum crosstrack error distance
- Parameters
-
cte_dist maximum distance value (specified in the this package's parameters.yaml configuration file)
Definition at line 769 of file route_generator_worker.cpp.
References cross_track_dist_.
Referenced by route::Route::handle_on_configure().

◆ setDowntrackDestinationRange()
| void route::RouteGeneratorWorker::setDowntrackDestinationRange | ( | double | dt_dest_range | ) |
Set method for configurable parameter.
- Parameters
-
dt_dest_range Minimum down track error which can trigger route complete event
Definition at line 598 of file route_generator_worker.cpp.
References down_track_target_range_.
Referenced by route::Route::handle_on_configure().

◆ setLoggerInterface()
| void route::RouteGeneratorWorker::setLoggerInterface | ( | rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr | logger | ) |
Dependency injection for logger interface.
- Parameters
-
logger Logger interface that will be used by worker class
Definition at line 29 of file route_generator_worker.cpp.
References logger_, rs_worker_, and route::RouteStateWorker::setLoggerInterface().
Referenced by route::Route::handle_on_configure().


◆ setPublishers()
| void route::RouteGeneratorWorker::setPublishers | ( | const carma_ros2_utils::PubPtr< carma_planning_msgs::msg::RouteEvent > & | route_event_pub, |
| const carma_ros2_utils::PubPtr< carma_planning_msgs::msg::RouteState > & | route_state_pub, | ||
| const carma_ros2_utils::PubPtr< carma_planning_msgs::msg::Route > & | route_pub, | ||
| const carma_ros2_utils::PubPtr< visualization_msgs::msg::Marker > & | route_marker_pub | ||
| ) |
Method to pass publishers into worker class.
- Parameters
-
route_event_pub Route event publisher route_state_pub Route state publisher route_pub Route publisher route_marker_pub Route marker publisher
Definition at line 587 of file route_generator_worker.cpp.
References route_event_pub_, route_marker_pub_, route_pub_, and route_state_pub_.
Referenced by route::Route::handle_on_configure().

◆ setReroutingChecker()
| void route::RouteGeneratorWorker::setReroutingChecker | ( | const std::function< bool()> | inputFunction | ) |
setReroutingChecker function to set the rerouting flag
Definition at line 71 of file route_generator_worker.cpp.
References reroutingChecker.
Referenced by route::Route::handle_on_configure().

◆ setRouteFilePath()
| void route::RouteGeneratorWorker::setRouteFilePath | ( | const std::string & | path | ) |
Set method for configurable parameter.
- Parameters
-
path The location of route files
Definition at line 142 of file route_generator_worker.cpp.
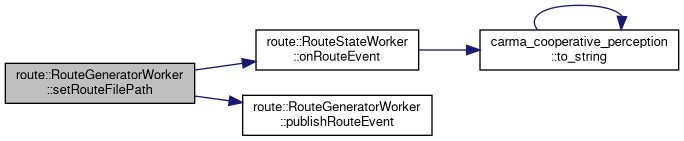
References route::RouteStateWorker::onRouteEvent(), publishRouteEvent(), route_file_path_, route::ROUTE_LOADED, and rs_worker_.
Referenced by route::Route::handle_on_activate().

◆ setWorldModelPtr()
| void route::RouteGeneratorWorker::setWorldModelPtr | ( | carma_wm::WorldModelConstPtr | wm | ) |
Dependency injection for world model pointer.
- Parameters
-
wm CARMA world model object providing lanelet vector map and traffic regulations
Definition at line 24 of file route_generator_worker.cpp.
References world_model_.
Referenced by route::Route::handle_on_configure().

◆ spinCallback()
| bool route::RouteGeneratorWorker::spinCallback | ( | ) |
Spin callback which will be called frequently based on spin rate.
Definition at line 636 of file route_generator_worker.cpp.
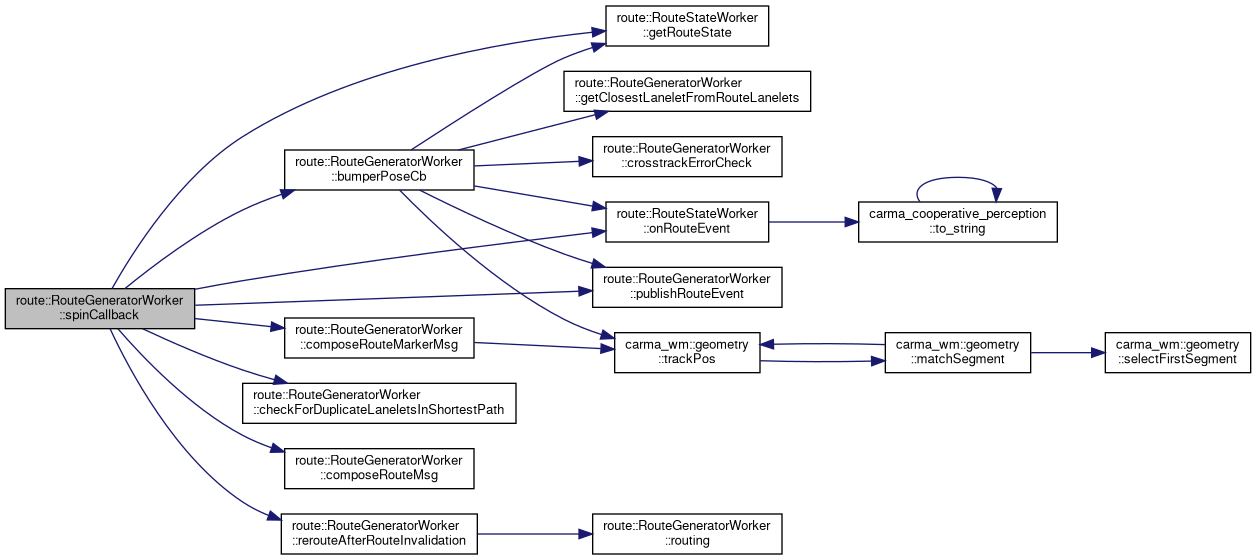
References bumperPoseCb(), checkForDuplicateLaneletsInShortestPath(), clock_, composeRouteMarkerMsg(), composeRouteMsg(), current_crosstrack_distance_, current_downtrack_distance_, destination_points_in_map_, route::RouteStateWorker::getRouteState(), ll_downtrack_distance_, ll_id_, logger_, new_route_marker_generated_, new_route_msg_generated_, route::RouteStateWorker::onRouteEvent(), publishRouteEvent(), rerouteAfterRouteInvalidation(), reroutingChecker, route_event_msg_, route_event_pub_, route_event_queue, route::ROUTE_GEN_FAILED, route::ROUTE_INVALIDATION, route_marker_msg_, route_marker_pub_, route_msg_, route_pub_, route::ROUTE_STARTED, route_state_pub_, rs_worker_, speed_limit_, and world_model_.
Referenced by route::Route::handle_on_activate().

◆ twistCb()
| void route::RouteGeneratorWorker::twistCb | ( | geometry_msgs::msg::TwistStamped::UniquePtr | msg | ) |
Callback for the twist subscriber, which will store latest twist locally.
- Parameters
-
msg Latest twist message
Definition at line 577 of file route_generator_worker.cpp.
References current_speed_.
Referenced by route::Route::handle_on_configure().

Member Data Documentation
◆ clock_
|
private |
Definition at line 354 of file route_generator_worker.hpp.
Referenced by setActiveRouteCb(), setClock(), and spinCallback().
◆ cross_track_dist_
|
private |
Definition at line 331 of file route_generator_worker.hpp.
Referenced by crosstrackErrorCheck(), and setCrosstrackErrorDistance().
◆ cte_count_
|
private |
Definition at line 334 of file route_generator_worker.hpp.
Referenced by crosstrackErrorCheck().
◆ cte_count_max_
|
private |
Definition at line 336 of file route_generator_worker.hpp.
Referenced by crosstrackErrorCheck(), and setCrosstrackErrorCountMax().
◆ current_crosstrack_distance_
|
private |
Definition at line 291 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), and spinCallback().
◆ current_downtrack_distance_
|
private |
Definition at line 294 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), rerouteAfterRouteInvalidation(), and spinCallback().
◆ current_loc_
|
private |
Definition at line 297 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), and rerouteAfterRouteInvalidation().
◆ current_speed_
|
private |
Definition at line 310 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), and twistCb().
◆ DEG_TO_RAD
|
private |
Definition at line 265 of file route_generator_worker.hpp.
◆ destination_points_in_map_
|
private |
Definition at line 339 of file route_generator_worker.hpp.
Referenced by rerouteAfterRouteInvalidation(), setActiveRouteCb(), and spinCallback().
◆ down_track_target_range_
|
private |
Definition at line 288 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), and setDowntrackDestinationRange().
◆ epsilon_
|
staticconstexprprivate |
Definition at line 312 of file route_generator_worker.hpp.
Referenced by bumperPoseCb().
◆ frontbumper_transform_
|
private |
Definition at line 345 of file route_generator_worker.hpp.
Referenced by bumperPoseCb().
◆ ll_crosstrack_distance_
|
private |
Definition at line 300 of file route_generator_worker.hpp.
Referenced by bumperPoseCb().
◆ ll_downtrack_distance_
|
private |
Definition at line 303 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), and spinCallback().
◆ ll_id_
|
private |
Definition at line 305 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), and spinCallback().
◆ logger_
|
private |
Definition at line 352 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), composeRouteMarkerMsg(), crosstrackErrorCheck(), getAvailableRouteCb(), rerouteAfterRouteInvalidation(), routing(), setActiveRouteCb(), setLoggerInterface(), and spinCallback().
◆ map_proj_
|
private |
Definition at line 342 of file route_generator_worker.hpp.
Referenced by georeferenceCb(), loadRouteDestinationsInMapFrame(), and setActiveRouteCb().
◆ new_route_marker_generated_
|
private |
Definition at line 322 of file route_generator_worker.hpp.
Referenced by composeRouteMarkerMsg(), and spinCallback().
◆ new_route_msg_generated_
|
private |
Definition at line 321 of file route_generator_worker.hpp.
Referenced by setActiveRouteCb(), and spinCallback().
◆ points_
|
private |
Definition at line 282 of file route_generator_worker.hpp.
◆ reroutingChecker
| std::function<bool()> route::RouteGeneratorWorker::reroutingChecker |
reroutingChecker function to set the rerouting flag locally
Definition at line 70 of file route_generator_worker.hpp.
Referenced by setReroutingChecker(), and spinCallback().
◆ route_event_msg_
|
private |
Definition at line 278 of file route_generator_worker.hpp.
Referenced by spinCallback().
◆ route_event_pub_
|
private |
Definition at line 315 of file route_generator_worker.hpp.
Referenced by setPublishers(), and spinCallback().
◆ route_event_queue
|
private |
Definition at line 325 of file route_generator_worker.hpp.
Referenced by publishRouteEvent(), and spinCallback().
◆ route_file_path_
|
private |
Definition at line 271 of file route_generator_worker.hpp.
Referenced by getAvailableRouteCb(), loadRouteDestinationGpsPointsFromRouteId(), and setRouteFilePath().
◆ route_llts
|
private |
Definition at line 285 of file route_generator_worker.hpp.
Referenced by addLanelet(), getClosestLaneletFromRouteLanelets(), and setActiveRouteCb().
◆ route_marker_msg_
|
private |
Definition at line 280 of file route_generator_worker.hpp.
Referenced by composeRouteMarkerMsg(), setActiveRouteCb(), and spinCallback().
◆ route_marker_pub_
|
private |
Definition at line 318 of file route_generator_worker.hpp.
Referenced by setPublishers(), and spinCallback().
◆ route_msg_
|
private |
Definition at line 277 of file route_generator_worker.hpp.
Referenced by abortActiveRouteCb(), bumperPoseCb(), setActiveRouteCb(), and spinCallback().
◆ route_pub_
|
private |
Definition at line 317 of file route_generator_worker.hpp.
Referenced by setPublishers(), and spinCallback().
◆ route_state_msg_
|
private |
Definition at line 279 of file route_generator_worker.hpp.
◆ route_state_pub_
|
private |
Definition at line 316 of file route_generator_worker.hpp.
Referenced by setPublishers(), and spinCallback().
◆ rs_worker_
|
private |
Definition at line 268 of file route_generator_worker.hpp.
Referenced by abortActiveRouteCb(), bumperPoseCb(), getAvailableRouteCb(), setActiveRouteCb(), setLoggerInterface(), setRouteFilePath(), and spinCallback().
◆ speed_limit_
|
private |
Definition at line 308 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), and spinCallback().
◆ tf2_buffer_
|
private |
Definition at line 348 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), and initializeBumperTransformLookup().
◆ tf2_listener_
|
private |
Definition at line 349 of file route_generator_worker.hpp.
Referenced by initializeBumperTransformLookup().
◆ tf_
|
private |
Definition at line 344 of file route_generator_worker.hpp.
Referenced by bumperPoseCb().
◆ vehicle_pose_
| boost::optional<geometry_msgs::msg::PoseStamped> route::RouteGeneratorWorker::vehicle_pose_ |
Definition at line 261 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), and setActiveRouteCb().
◆ world_model_
|
private |
Definition at line 274 of file route_generator_worker.hpp.
Referenced by bumperPoseCb(), rerouteAfterRouteInvalidation(), setActiveRouteCb(), setWorldModelPtr(), and spinCallback().
The documentation for this class was generated from the following files:
- route/include/route/route_generator_worker.hpp
- route/src/route_generator_worker.cpp