#include <arbitrator_node.hpp>
Public Member Functions | |
| ArbitratorNode (const rclcpp::NodeOptions &options) | |
| Constructor. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) |
Private Member Functions | |
| std::map< std::string, double > | plugin_priorities_map_from_json (const std::string &json_string) |
Private Attributes | |
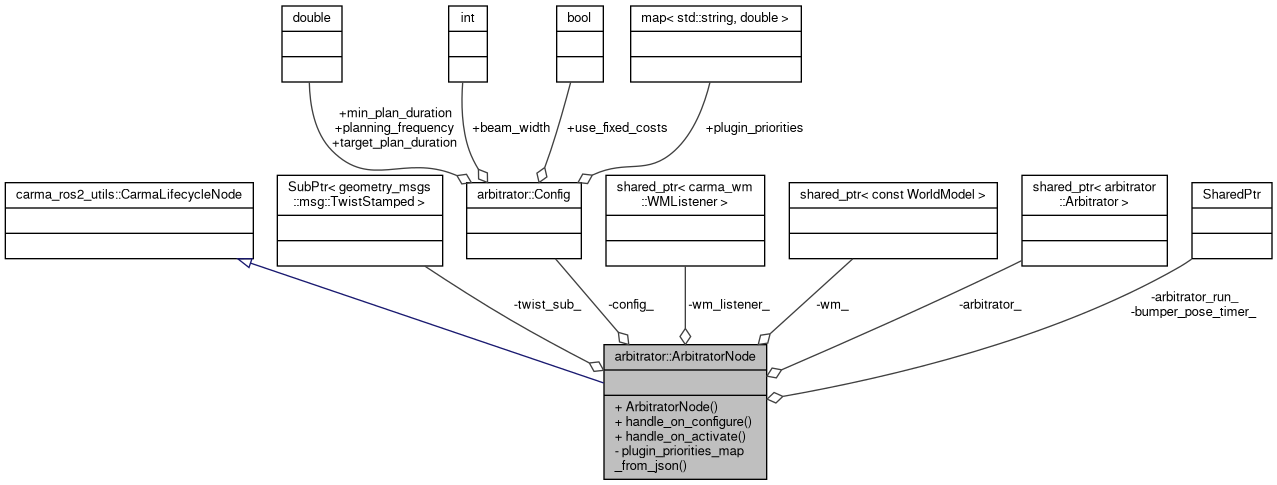
| carma_ros2_utils::SubPtr< geometry_msgs::msg::TwistStamped > | twist_sub_ |
| Config | config_ |
| std::shared_ptr< carma_wm::WMListener > | wm_listener_ |
| carma_wm::WorldModelConstPtr | wm_ |
| std::shared_ptr< Arbitrator > | arbitrator_ |
| rclcpp::TimerBase::SharedPtr | bumper_pose_timer_ |
| rclcpp::CallbackGroup::SharedPtr | arbitrator_run_callback_group_ |
| rclcpp::TimerBase::SharedPtr | arbitrator_run_ |
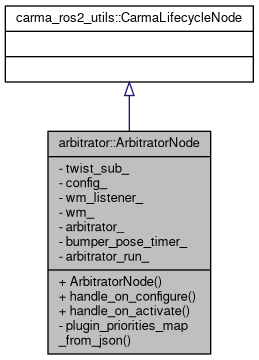
Detailed Description
An arbitrator node instance with currently used configuration/planning paradigms
Governs the interactions of plugins during the maneuver planning phase of the CARMA planning process by internally using a worker class with generic planning interface.
Definition at line 49 of file arbitrator_node.hpp.
Constructor & Destructor Documentation
◆ ArbitratorNode()
|
explicit |
Constructor.
Definition at line 22 of file arbitrator_node.cpp.
References arbitrator::Config::beam_width, config_, arbitrator::Config::min_plan_duration, arbitrator::Config::planning_frequency, arbitrator::Config::plugin_priorities, plugin_priorities_map_from_json(), arbitrator::Config::target_plan_duration, and arbitrator::Config::use_fixed_costs.

Member Function Documentation
◆ handle_on_activate()
| carma_ros2_utils::CallbackReturn arbitrator::ArbitratorNode::handle_on_activate | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 96 of file arbitrator_node.cpp.
References arbitrator_, arbitrator_run_, arbitrator_run_callback_group_, bumper_pose_timer_, config_, and arbitrator::Config::planning_frequency.
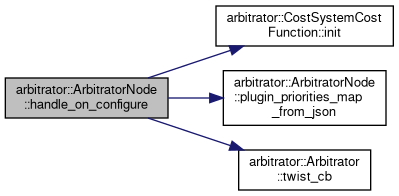
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn arbitrator::ArbitratorNode::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 35 of file arbitrator_node.cpp.
References arbitrator_, arbitrator::Config::beam_width, config_, arbitrator::CostSystemCostFunction::init(), arbitrator::Config::min_plan_duration, arbitrator::Config::planning_frequency, arbitrator::Config::plugin_priorities, plugin_priorities_map_from_json(), arbitrator::Config::target_plan_duration, arbitrator::Arbitrator::twist_cb(), twist_sub_, arbitrator::Config::use_fixed_costs, wm_, and wm_listener_.
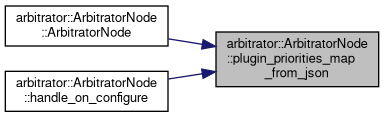
◆ plugin_priorities_map_from_json()
|
private |
Definition at line 115 of file arbitrator_node.cpp.
Referenced by ArbitratorNode(), and handle_on_configure().
Member Data Documentation
◆ arbitrator_
|
private |
Definition at line 72 of file arbitrator_node.hpp.
Referenced by handle_on_activate(), and handle_on_configure().
◆ arbitrator_run_
|
private |
Definition at line 76 of file arbitrator_node.hpp.
Referenced by handle_on_activate().
◆ arbitrator_run_callback_group_
|
private |
Definition at line 75 of file arbitrator_node.hpp.
Referenced by handle_on_activate().
◆ bumper_pose_timer_
|
private |
Definition at line 73 of file arbitrator_node.hpp.
Referenced by handle_on_activate().
◆ config_
|
private |
Definition at line 68 of file arbitrator_node.hpp.
Referenced by ArbitratorNode(), handle_on_activate(), and handle_on_configure().
◆ twist_sub_
|
private |
Definition at line 66 of file arbitrator_node.hpp.
Referenced by handle_on_configure().
◆ wm_
|
private |
Definition at line 71 of file arbitrator_node.hpp.
Referenced by handle_on_configure().
◆ wm_listener_
|
private |
Definition at line 70 of file arbitrator_node.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- arbitrator/include/arbitrator_node.hpp
- arbitrator/src/arbitrator_node.cpp