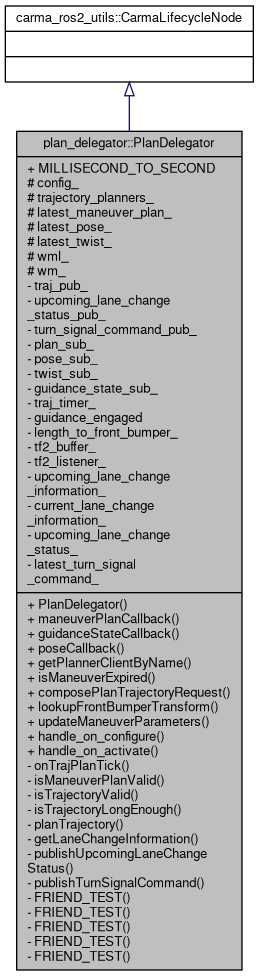
#include <plan_delegator.hpp>
Public Member Functions | |
| PlanDelegator (const rclcpp::NodeOptions &) | |
| PlanDelegator constructor. More... | |
| void | maneuverPlanCallback (carma_planning_msgs::msg::ManeuverPlan::UniquePtr plan) |
| Callback function of maneuver plan subscriber. More... | |
| void | guidanceStateCallback (carma_planning_msgs::msg::GuidanceState::UniquePtr plan) |
| Callback function of guidance state subscriber. More... | |
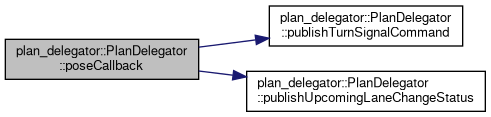
| void | poseCallback (geometry_msgs::msg::PoseStamped::UniquePtr pose_msg) |
| Callback function for vehicle pose subscriber. Updates latest_pose_ and makes calls to publishUpcomingLaneChangeStatus() and publishTurnSignalCommand(). More... | |
| carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > | getPlannerClientByName (const std::string &planner_name) |
| Get PlanTrajectory service client by plugin name and create new PlanTrajectory service client if specified name does not exist. More... | |
| bool | isManeuverExpired (const carma_planning_msgs::msg::Maneuver &maneuver, rclcpp::Time current_time) const |
| Example if a maneuver end time has passed current system time. More... | |
| std::shared_ptr< carma_planning_msgs::srv::PlanTrajectory::Request > | composePlanTrajectoryRequest (const carma_planning_msgs::msg::TrajectoryPlan &latest_trajectory_plan, const carma_planning_msgs::msg::ManeuverPlan &locked_maneuver_plan, const uint16_t ¤t_maneuver_index) const |
| Generate new PlanTrajecory service request based on current planning progress. More... | |
| void | lookupFrontBumperTransform () |
| Lookup transfrom from front bumper to base link. More... | |
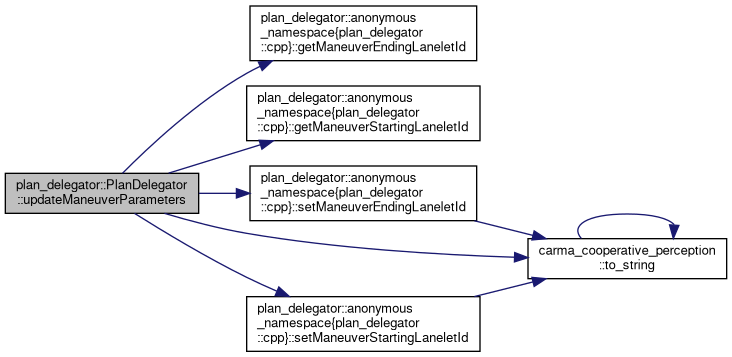
| void | updateManeuverParameters (carma_planning_msgs::msg::Maneuver &maneuver) |
| Update the starting downtrack, ending downtrack, and maneuver-specific Lanelet ID parameters associated with a given maneuver. These updates are required since the starting and ending downtrack values of each maneuver are shifted based on the distance between the base_link frame and the vehicle_front frame. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) |
Static Public Attributes | |
| static const constexpr double | MILLISECOND_TO_SECOND = 0.001 |
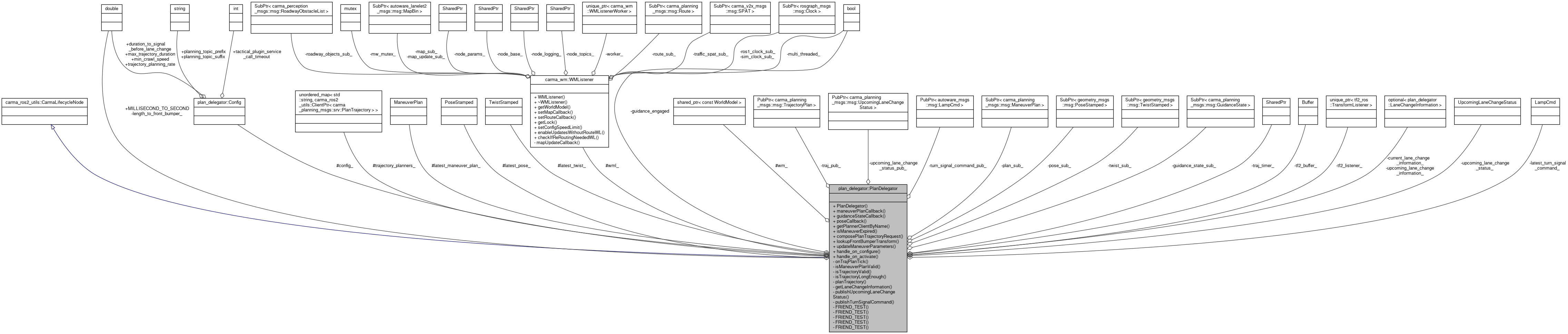
Protected Attributes | |
| Config | config_ |
| std::unordered_map< std::string, carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > > | trajectory_planners_ |
| carma_planning_msgs::msg::ManeuverPlan | latest_maneuver_plan_ |
| bool | received_maneuver_plan_ = false |
| geometry_msgs::msg::PoseStamped | latest_pose_ |
| geometry_msgs::msg::TwistStamped | latest_twist_ |
| carma_wm::WMListener | wml_ |
| carma_wm::WorldModelConstPtr | wm_ |
Private Member Functions | |
| void | onTrajPlanTick () |
| Callback function for triggering trajectory planning. More... | |
| bool | isManeuverPlanValid (const carma_planning_msgs::msg::ManeuverPlan &maneuver_plan) const noexcept |
| Example if a maneuver plan contains at least one maneuver. More... | |
| bool | isTrajectoryValid (const carma_planning_msgs::msg::TrajectoryPlan &trajectory_plan) const noexcept |
| Example if a trajectory plan contains at least two trajectory points. More... | |
| bool | isTrajectoryLongEnough (const carma_planning_msgs::msg::TrajectoryPlan &plan) const noexcept |
| Example if a trajectory plan is longer than configured time thresheld. More... | |
| carma_planning_msgs::msg::TrajectoryPlan | planTrajectory () |
| Plan trajectory based on latest maneuver plan via ROS service call to plugins. More... | |
| LaneChangeInformation | getLaneChangeInformation (const carma_planning_msgs::msg::Maneuver &lane_change_maneuver) |
| Function for generating a LaneChangeInformation object from a provided lane change maneuver. More... | |
| void | publishUpcomingLaneChangeStatus (const boost::optional< LaneChangeInformation > &upcoming_lane_change_information) |
| Function for processing an optional LaneChangeInformation object pertaining to an upcoming lane change. If not empty, an UpcomingLaneChangeStatus message is created and published based on the contents of the LaneChangeInformation. The published UpcomingLaneChangeStatus message is stored in upcoming_lane_change_status_. More... | |
| void | publishTurnSignalCommand (const boost::optional< LaneChangeInformation > ¤t_lane_change_information, const carma_planning_msgs::msg::UpcomingLaneChangeStatus &upcoming_lane_change_status) |
| Function for processing an optional LaneChangeInformation object pertaining to the currently-occurring lane change and an UpcomingLaneChangeStatus message. If the optional object pertaining to the currently-occurring lane change is not empty, then a turn signal command is published based on the current lane change direction. Otherwise, a turn signal command in the direction of the UpcomingLaneChangeStatus message is published if the vehicle is estimated to begin that lane change in under the time threshold defined by config_.duration_to_signal_before_lane_change. The published TurnSignalComand message is stored in latest_turn_signal_command_. More... | |
| FRIEND_TEST (TestPlanDelegator, UnitTestPlanDelegator) | |
| FRIEND_TEST (TestPlanDelegator, TestPlanDelegator) | |
| FRIEND_TEST (TestPlanDelegator, TestLaneChangeInformation) | |
| FRIEND_TEST (TestPlanDelegator, TestUpcomingLaneChangeAndTurnSignals) | |
| FRIEND_TEST (TestPlanDelegator, TestUpdateManeuverParameters) | |
| FRIEND_TEST (TestPlanDelegator, TestGetLaneChangeInformation) | |
Private Attributes | |
| std::optional< carma_planning_msgs::msg::TrajectoryPlan > | last_successful_traj_ |
| carma_ros2_utils::PubPtr< carma_planning_msgs::msg::TrajectoryPlan > | traj_pub_ |
| carma_ros2_utils::PubPtr< carma_planning_msgs::msg::UpcomingLaneChangeStatus > | upcoming_lane_change_status_pub_ |
| carma_ros2_utils::PubPtr< autoware_msgs::msg::LampCmd > | turn_signal_command_pub_ |
| carma_ros2_utils::SubPtr< carma_planning_msgs::msg::ManeuverPlan > | plan_sub_ |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::PoseStamped > | pose_sub_ |
| carma_ros2_utils::SubPtr< geometry_msgs::msg::TwistStamped > | twist_sub_ |
| carma_ros2_utils::SubPtr< carma_planning_msgs::msg::GuidanceState > | guidance_state_sub_ |
| rclcpp::TimerBase::SharedPtr | traj_timer_ |
| rclcpp::CallbackGroup::SharedPtr | timer_callback_group_ |
| bool | guidance_engaged = false |
| int | consecutive_traj_gen_failure_num_ = 0 |
| double | length_to_front_bumper_ = 3.0 |
| std::shared_ptr< tf2_ros::Buffer > | tf2_buffer_ |
| std::shared_ptr< tf2_ros::TransformListener > | tf2_listener_ |
| boost::optional< LaneChangeInformation > | upcoming_lane_change_information_ |
| boost::optional< LaneChangeInformation > | current_lane_change_information_ |
| carma_planning_msgs::msg::UpcomingLaneChangeStatus | upcoming_lane_change_status_ |
| autoware_msgs::msg::LampCmd | latest_turn_signal_command_ |
Detailed Description
Definition at line 110 of file plan_delegator.hpp.
Constructor & Destructor Documentation
◆ PlanDelegator()
|
explicit |
PlanDelegator constructor.
Definition at line 132 of file plan_delegator.cpp.
References config_, plan_delegator::Config::duration_to_signal_before_lane_change, plan_delegator::Config::max_traj_generation_reattempt, plan_delegator::Config::max_trajectory_duration, plan_delegator::Config::min_crawl_speed, plan_delegator::Config::planning_topic_prefix, plan_delegator::Config::planning_topic_suffix, plan_delegator::Config::tactical_plugin_service_call_timeout, and plan_delegator::Config::trajectory_planning_rate.
Member Function Documentation
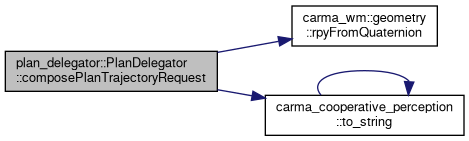
◆ composePlanTrajectoryRequest()
| std::shared_ptr< carma_planning_msgs::srv::PlanTrajectory::Request > plan_delegator::PlanDelegator::composePlanTrajectoryRequest | ( | const carma_planning_msgs::msg::TrajectoryPlan & | latest_trajectory_plan, |
| const carma_planning_msgs::msg::ManeuverPlan & | locked_maneuver_plan, | ||
| const uint16_t & | current_maneuver_index | ||
| ) | const |
Generate new PlanTrajecory service request based on current planning progress.
- Parameters
-
latest_trajectory_plan The trajectory plan to append the resulting trajectory locked_maneuver_plan The maneuver plan to send to the tactical plugin current_maneuver_index The idx of the maneuver in the maneuver plan that this request is for
- Returns
- a PlanTrajectoryRequest to be used in the service call to the tactical plugin
Definition at line 465 of file plan_delegator.cpp.
References latest_pose_, latest_twist_, carma_wm::geometry::rpyFromQuaternion(), and carma_cooperative_perception::to_string().
Referenced by planTrajectory().

◆ FRIEND_TEST() [1/6]
|
private |
◆ FRIEND_TEST() [2/6]
|
private |
◆ FRIEND_TEST() [3/6]
|
private |
◆ FRIEND_TEST() [4/6]
|
private |
◆ FRIEND_TEST() [5/6]
|
private |
◆ FRIEND_TEST() [6/6]
|
private |
◆ getLaneChangeInformation()
|
private |
Function for generating a LaneChangeInformation object from a provided lane change maneuver.
- Parameters
-
lane_change_maneuver The lane change maneuver that a LaneChangeInformation object shall be generated from.
- Returns
- A LaneChangeInformation object containing information on the provided lane change maneuver.
Definition at line 259 of file plan_delegator.cpp.
References plan_delegator::LaneChangeInformation::is_right_lane_change, plan_delegator::LaneChangeInformation::starting_downtrack, carma_cooperative_perception::to_string(), and wm_.
Referenced by maneuverPlanCallback().


◆ getPlannerClientByName()
| carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > plan_delegator::PlanDelegator::getPlannerClientByName | ( | const std::string & | planner_name | ) |
Get PlanTrajectory service client by plugin name and create new PlanTrajectory service client if specified name does not exist.
- Returns
- a ServiceClient object which corresponse to the target planner
Definition at line 425 of file plan_delegator.cpp.
References config_, plan_delegator::Config::planning_topic_prefix, plan_delegator::Config::planning_topic_suffix, and trajectory_planners_.
Referenced by planTrajectory().

◆ guidanceStateCallback()
| void plan_delegator::PlanDelegator::guidanceStateCallback | ( | carma_planning_msgs::msg::GuidanceState::UniquePtr | plan | ) |
Callback function of guidance state subscriber.
Definition at line 192 of file plan_delegator.cpp.
References lightbar_manager::ENGAGED, and guidance_engaged.
Referenced by handle_on_configure().

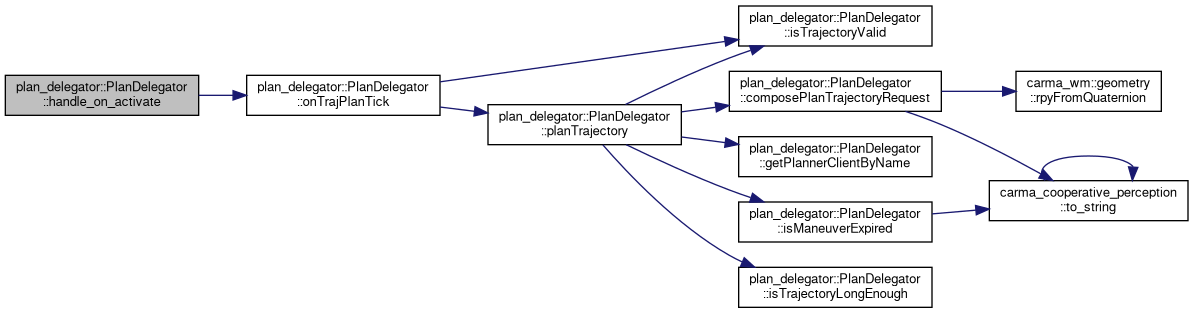
◆ handle_on_activate()
| carma_ros2_utils::CallbackReturn plan_delegator::PlanDelegator::handle_on_activate | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 183 of file plan_delegator.cpp.
References config_, onTrajPlanTick(), timer_callback_group_, traj_timer_, and plan_delegator::Config::trajectory_planning_rate.
◆ handle_on_configure()
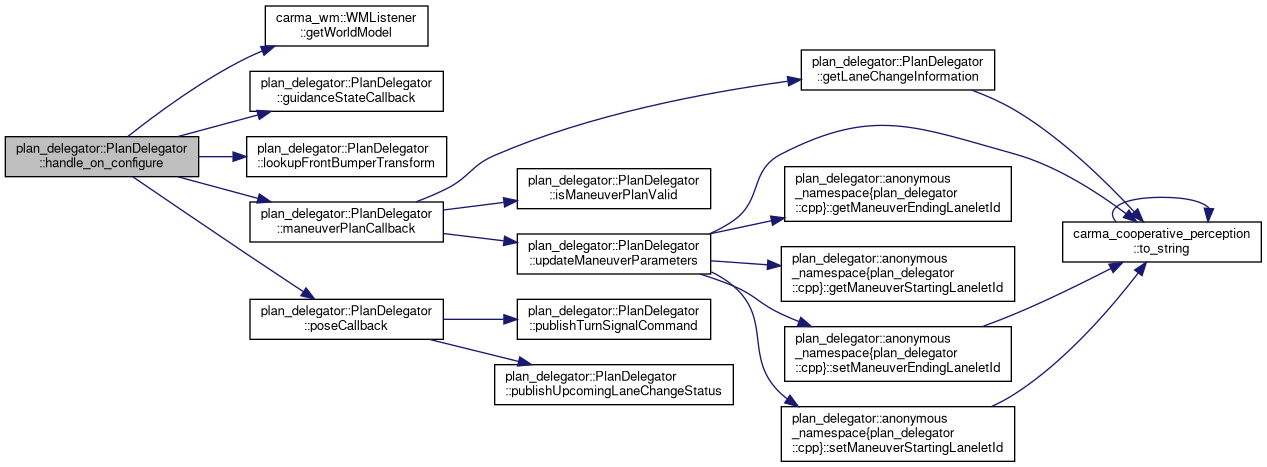
| carma_ros2_utils::CallbackReturn plan_delegator::PlanDelegator::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 150 of file plan_delegator.cpp.
References config_, plan_delegator::Config::duration_to_signal_before_lane_change, carma_wm::WMListener::getWorldModel(), guidance_state_sub_, guidanceStateCallback(), latest_twist_, lookupFrontBumperTransform(), maneuverPlanCallback(), plan_delegator::Config::max_traj_generation_reattempt, plan_delegator::Config::max_trajectory_duration, plan_delegator::Config::min_crawl_speed, plan_sub_, plan_delegator::Config::planning_topic_prefix, plan_delegator::Config::planning_topic_suffix, pose_sub_, poseCallback(), plan_delegator::Config::tactical_plugin_service_call_timeout, traj_pub_, plan_delegator::Config::trajectory_planning_rate, turn_signal_command_pub_, twist_sub_, upcoming_lane_change_status_pub_, wm_, and wml_.
◆ isManeuverExpired()
| bool plan_delegator::PlanDelegator::isManeuverExpired | ( | const carma_planning_msgs::msg::Maneuver & | maneuver, |
| rclcpp::Time | current_time | ||
| ) | const |
Example if a maneuver end time has passed current system time.
- Returns
- if input maneuver is expires NOTE: current_time is assumed to be same clock type as this node
Definition at line 453 of file plan_delegator.cpp.
References GET_MANEUVER_PROPERTY, and carma_cooperative_perception::to_string().
Referenced by planTrajectory().


◆ isManeuverPlanValid()
|
privatenoexcept |
Example if a maneuver plan contains at least one maneuver.
- Returns
- if input maneuver plan is valid
Definition at line 441 of file plan_delegator.cpp.
Referenced by maneuverPlanCallback().

◆ isTrajectoryLongEnough()
|
privatenoexcept |
Example if a trajectory plan is longer than configured time thresheld.
- Returns
- if input trajectory plan is long enough
Definition at line 509 of file plan_delegator.cpp.
Referenced by planTrajectory().

◆ isTrajectoryValid()
|
privatenoexcept |
Example if a trajectory plan contains at least two trajectory points.
- Returns
- if input trajectory plan is valid
Definition at line 447 of file plan_delegator.cpp.
Referenced by onTrajPlanTick(), and planTrajectory().

◆ lookupFrontBumperTransform()
| void plan_delegator::PlanDelegator::lookupFrontBumperTransform | ( | ) |
Lookup transfrom from front bumper to base link.
Definition at line 827 of file plan_delegator.cpp.
References length_to_front_bumper_, tf2_buffer_, and tf2_listener_.
Referenced by handle_on_configure().

◆ maneuverPlanCallback()
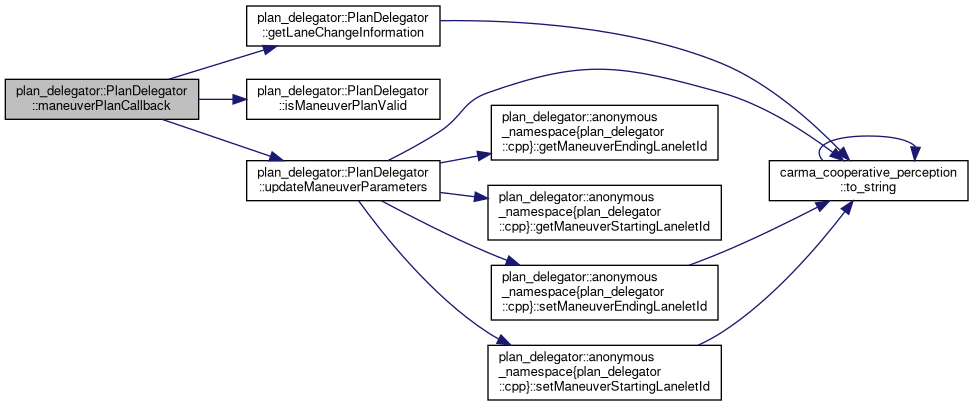
| void plan_delegator::PlanDelegator::maneuverPlanCallback | ( | carma_planning_msgs::msg::ManeuverPlan::UniquePtr | plan | ) |
Callback function of maneuver plan subscriber.
Definition at line 197 of file plan_delegator.cpp.
References current_lane_change_information_, getLaneChangeInformation(), isManeuverPlanValid(), latest_maneuver_plan_, latest_pose_, received_maneuver_plan_, upcoming_lane_change_information_, updateManeuverParameters(), and wm_.
Referenced by handle_on_configure().

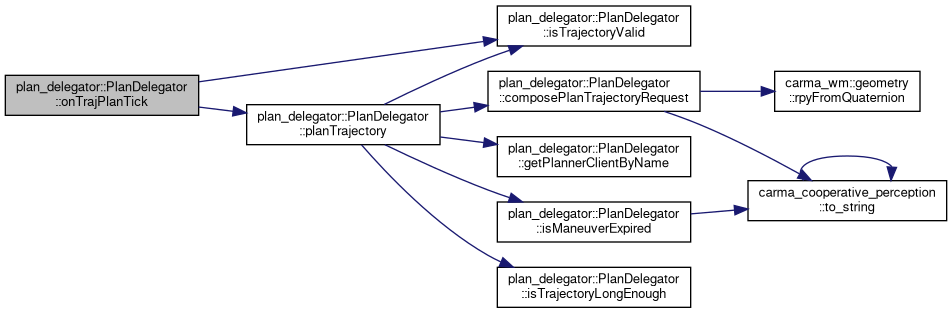
◆ onTrajPlanTick()
|
private |
Callback function for triggering trajectory planning.
Definition at line 773 of file plan_delegator.cpp.
References config_, consecutive_traj_gen_failure_num_, guidance_engaged, isTrajectoryValid(), last_successful_traj_, plan_delegator::Config::max_traj_generation_reattempt, planTrajectory(), received_maneuver_plan_, carma_cooperative_perception::to_string(), and traj_pub_.
Referenced by handle_on_activate().

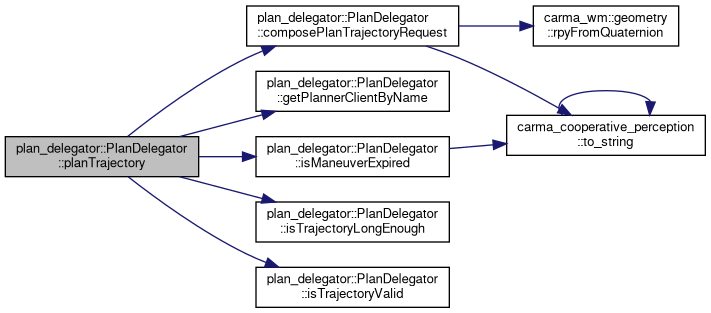
◆ planTrajectory()
|
private |
Plan trajectory based on latest maneuver plan via ROS service call to plugins.
- Returns
- a TrajectoryPlan object which contains PlanTrajectory response from plugins
Definition at line 646 of file plan_delegator.cpp.
References composePlanTrajectoryRequest(), config_, GET_MANEUVER_PROPERTY, getPlannerClientByName(), guidance_engaged, isManeuverExpired(), isTrajectoryLongEnough(), isTrajectoryValid(), latest_maneuver_plan_, latest_pose_, plan_delegator::Config::tactical_plugin_service_call_timeout, and wm_.
Referenced by onTrajPlanTick().

◆ poseCallback()
| void plan_delegator::PlanDelegator::poseCallback | ( | geometry_msgs::msg::PoseStamped::UniquePtr | pose_msg | ) |
Callback function for vehicle pose subscriber. Updates latest_pose_ and makes calls to publishUpcomingLaneChangeStatus() and publishTurnSignalCommand().
- Parameters
-
pose_msg The received pose message.
Definition at line 248 of file plan_delegator.cpp.
References current_lane_change_information_, latest_pose_, publishTurnSignalCommand(), publishUpcomingLaneChangeStatus(), upcoming_lane_change_information_, and upcoming_lane_change_status_.
Referenced by handle_on_configure().

◆ publishTurnSignalCommand()
|
private |
Function for processing an optional LaneChangeInformation object pertaining to the currently-occurring lane change and an UpcomingLaneChangeStatus message. If the optional object pertaining to the currently-occurring lane change is not empty, then a turn signal command is published based on the current lane change direction. Otherwise, a turn signal command in the direction of the UpcomingLaneChangeStatus message is published if the vehicle is estimated to begin that lane change in under the time threshold defined by config_.duration_to_signal_before_lane_change. The published TurnSignalComand message is stored in latest_turn_signal_command_.
- Parameters
-
current_lane_change_information An optional LaneChangeInformation object pertaining to the current lane change. Empty if vehicle is not currently changing lanes. upcoming_lane_change_status An UpcomingLaneChangeStatus message containing the lane change direction of an upcoming lane change, along with the downtrack distance to that lane change.
Definition at line 387 of file plan_delegator.cpp.
References config_, plan_delegator::Config::duration_to_signal_before_lane_change, latest_turn_signal_command_, latest_twist_, and turn_signal_command_pub_.
Referenced by poseCallback().

◆ publishUpcomingLaneChangeStatus()
|
private |
Function for processing an optional LaneChangeInformation object pertaining to an upcoming lane change. If not empty, an UpcomingLaneChangeStatus message is created and published based on the contents of the LaneChangeInformation. The published UpcomingLaneChangeStatus message is stored in upcoming_lane_change_status_.
- Parameters
-
upcoming_lane_change_information An optional LaneChangeInformation object. Empty if no upcoming lane change exists.
Definition at line 357 of file plan_delegator.cpp.
References latest_pose_, upcoming_lane_change_status_, upcoming_lane_change_status_pub_, and wm_.
Referenced by poseCallback().

◆ updateManeuverParameters()
| void plan_delegator::PlanDelegator::updateManeuverParameters | ( | carma_planning_msgs::msg::Maneuver & | maneuver | ) |
Update the starting downtrack, ending downtrack, and maneuver-specific Lanelet ID parameters associated with a given maneuver. These updates are required since the starting and ending downtrack values of each maneuver are shifted based on the distance between the base_link frame and the vehicle_front frame.
- Parameters
-
maneuver The maneuver to be updated.
Definition at line 515 of file plan_delegator.cpp.
References GET_MANEUVER_PROPERTY, plan_delegator::anonymous_namespace{plan_delegator.cpp}::getManeuverEndingLaneletId(), plan_delegator::anonymous_namespace{plan_delegator.cpp}::getManeuverStartingLaneletId(), length_to_front_bumper_, SET_MANEUVER_PROPERTY, plan_delegator::anonymous_namespace{plan_delegator.cpp}::setManeuverEndingLaneletId(), plan_delegator::anonymous_namespace{plan_delegator.cpp}::setManeuverStartingLaneletId(), carma_cooperative_perception::to_string(), and wm_.
Referenced by maneuverPlanCallback().

Member Data Documentation
◆ config_
|
protected |
Definition at line 188 of file plan_delegator.hpp.
Referenced by PlanDelegator(), getPlannerClientByName(), handle_on_activate(), handle_on_configure(), onTrajPlanTick(), planTrajectory(), and publishTurnSignalCommand().
◆ consecutive_traj_gen_failure_num_
|
private |
Definition at line 220 of file plan_delegator.hpp.
Referenced by onTrajPlanTick().
◆ current_lane_change_information_
|
private |
Definition at line 232 of file plan_delegator.hpp.
Referenced by maneuverPlanCallback(), and poseCallback().
◆ guidance_engaged
|
private |
Definition at line 219 of file plan_delegator.hpp.
Referenced by guidanceStateCallback(), onTrajPlanTick(), and planTrajectory().
◆ guidance_state_sub_
|
private |
Definition at line 213 of file plan_delegator.hpp.
Referenced by handle_on_configure().
◆ last_successful_traj_
|
private |
Definition at line 204 of file plan_delegator.hpp.
Referenced by onTrajPlanTick().
◆ latest_maneuver_plan_
|
protected |
Definition at line 193 of file plan_delegator.hpp.
Referenced by maneuverPlanCallback(), and planTrajectory().
◆ latest_pose_
|
protected |
Definition at line 195 of file plan_delegator.hpp.
Referenced by composePlanTrajectoryRequest(), maneuverPlanCallback(), planTrajectory(), poseCallback(), and publishUpcomingLaneChangeStatus().
◆ latest_turn_signal_command_
|
private |
Definition at line 238 of file plan_delegator.hpp.
Referenced by publishTurnSignalCommand().
◆ latest_twist_
|
protected |
Definition at line 196 of file plan_delegator.hpp.
Referenced by composePlanTrajectoryRequest(), handle_on_configure(), and publishTurnSignalCommand().
◆ length_to_front_bumper_
|
private |
Definition at line 222 of file plan_delegator.hpp.
Referenced by lookupFrontBumperTransform(), and updateManeuverParameters().
◆ MILLISECOND_TO_SECOND
|
staticconstexpr |
Definition at line 115 of file plan_delegator.hpp.
◆ plan_sub_
|
private |
Definition at line 210 of file plan_delegator.hpp.
Referenced by handle_on_configure().
◆ pose_sub_
|
private |
Definition at line 211 of file plan_delegator.hpp.
Referenced by handle_on_configure().
◆ received_maneuver_plan_
|
protected |
Definition at line 194 of file plan_delegator.hpp.
Referenced by maneuverPlanCallback(), and onTrajPlanTick().
◆ tf2_buffer_
|
private |
Definition at line 225 of file plan_delegator.hpp.
Referenced by lookupFrontBumperTransform().
◆ tf2_listener_
|
private |
Definition at line 226 of file plan_delegator.hpp.
Referenced by lookupFrontBumperTransform().
◆ timer_callback_group_
|
private |
Definition at line 217 of file plan_delegator.hpp.
Referenced by handle_on_activate().
◆ traj_pub_
|
private |
Definition at line 205 of file plan_delegator.hpp.
Referenced by handle_on_configure(), and onTrajPlanTick().
◆ traj_timer_
|
private |
Definition at line 215 of file plan_delegator.hpp.
Referenced by handle_on_activate().
◆ trajectory_planners_
|
protected |
Definition at line 191 of file plan_delegator.hpp.
Referenced by getPlannerClientByName().
◆ turn_signal_command_pub_
|
private |
Definition at line 207 of file plan_delegator.hpp.
Referenced by handle_on_configure(), and publishTurnSignalCommand().
◆ twist_sub_
|
private |
Definition at line 212 of file plan_delegator.hpp.
Referenced by handle_on_configure().
◆ upcoming_lane_change_information_
|
private |
Definition at line 229 of file plan_delegator.hpp.
Referenced by maneuverPlanCallback(), and poseCallback().
◆ upcoming_lane_change_status_
|
private |
Definition at line 235 of file plan_delegator.hpp.
Referenced by poseCallback(), and publishUpcomingLaneChangeStatus().
◆ upcoming_lane_change_status_pub_
|
private |
Definition at line 206 of file plan_delegator.hpp.
Referenced by handle_on_configure(), and publishUpcomingLaneChangeStatus().
◆ wm_
|
protected |
Definition at line 200 of file plan_delegator.hpp.
Referenced by getLaneChangeInformation(), handle_on_configure(), maneuverPlanCallback(), planTrajectory(), publishUpcomingLaneChangeStatus(), and updateManeuverParameters().
◆ wml_
|
protected |
Definition at line 199 of file plan_delegator.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- plan_delegator/include/plan_delegator.hpp
- plan_delegator/src/plan_delegator.cpp