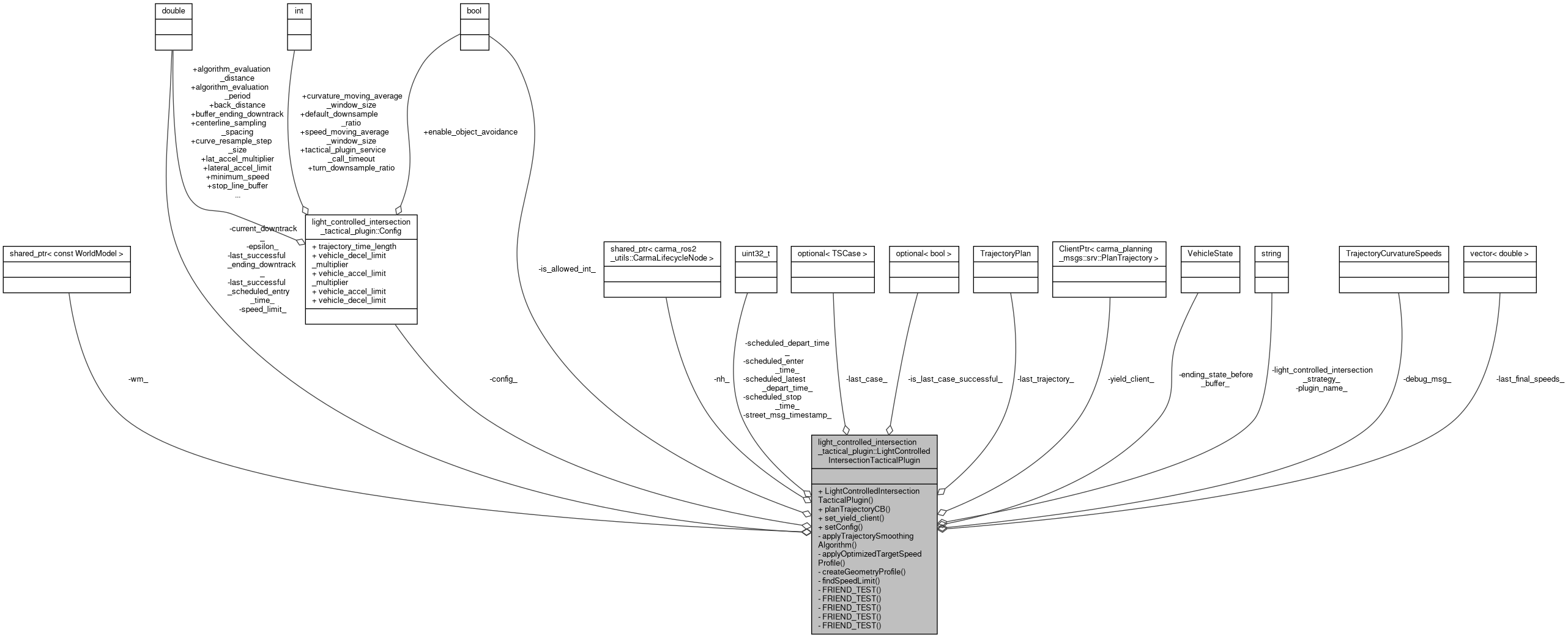
Class containing primary business logic for the Light Controlled Intersection Tactical Plugin. More...
#include <light_controlled_intersection_tactical_plugin.hpp>
Public Member Functions | |
| LightControlledIntersectionTacticalPlugin (carma_wm::WorldModelConstPtr wm, const Config &config, const DebugPublisher &debug_publisher, const std::string &plugin_name, std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > nh) | |
| LightControlledIntersectionTacticalPlugin constructor. More... | |
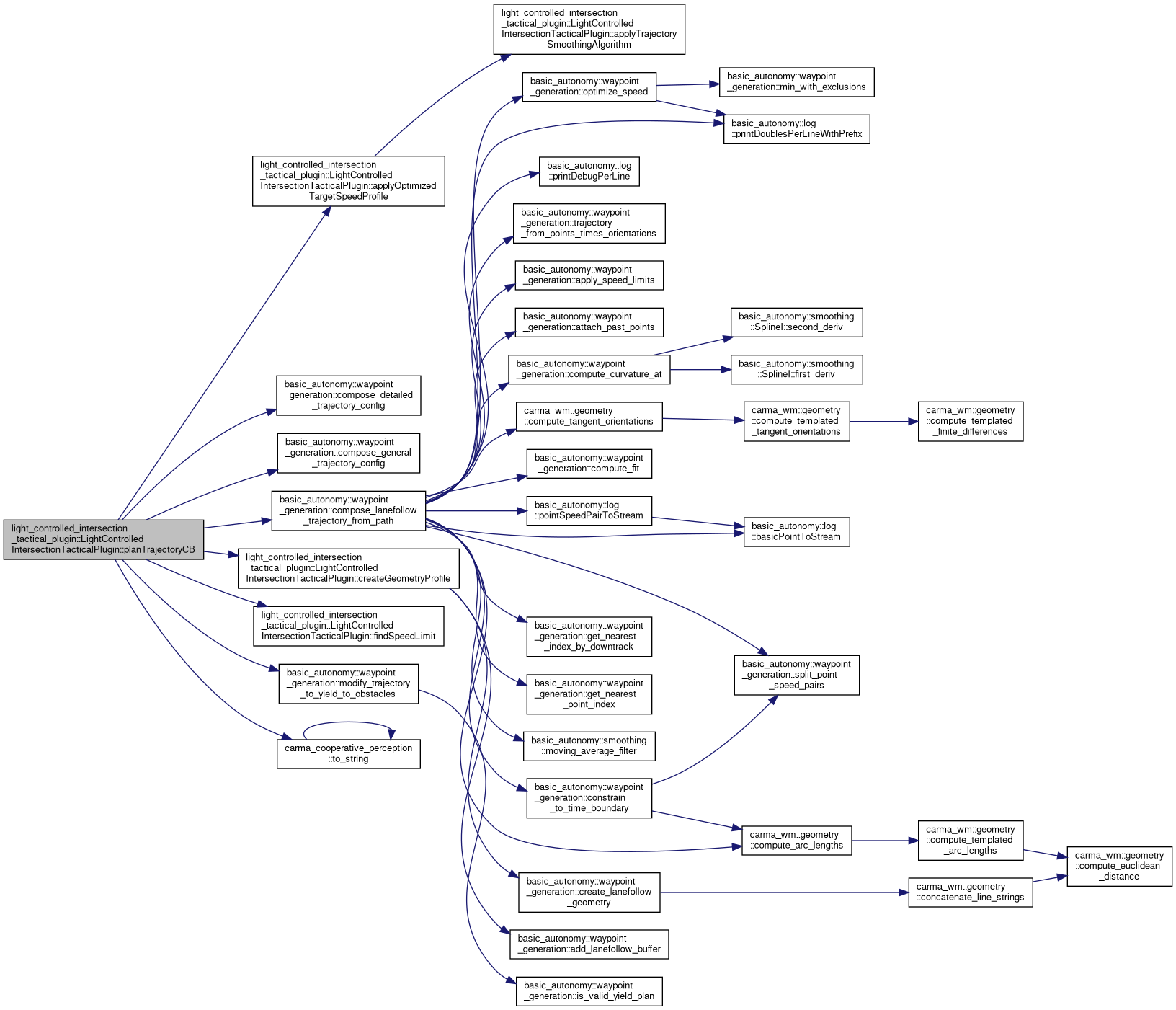
| void | planTrajectoryCB (carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr req, carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr resp) |
| Function to process the light controlled intersection tactical plugin service call for trajectory planning. More... | |
| void | set_yield_client (carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > client) |
| set the yield service More... | |
| void | setConfig (const Config &config) |
| Setter function to set a new config for this object. More... | |
Private Member Functions | |
| void | applyTrajectorySmoothingAlgorithm (const carma_wm::WorldModelConstPtr &wm, std::vector< PointSpeedPair > &points_and_target_speeds, double start_dist, double remaining_dist, double starting_speed, double departure_speed, TrajectoryParams tsp) |
| Creates a speed profile according to case one or two of the light controlled intersection, where the vehicle accelerates (then cruises if needed) and decelerates into the intersection. More... | |
| void | applyOptimizedTargetSpeedProfile (const carma_planning_msgs::msg::Maneuver &maneuver, const double starting_speed, std::vector< PointSpeedPair > &points_and_target_speeds) |
| Apply optimized target speeds to the trajectory determined for fixed-time and actuated signals. Based on TSMO USE CASE 2. Chapter 2. Trajectory Smoothing. More... | |
| std::vector< PointSpeedPair > | createGeometryProfile (const std::vector< carma_planning_msgs::msg::Maneuver > &maneuvers, double max_starting_downtrack, const carma_wm::WorldModelConstPtr &wm, carma_planning_msgs::msg::VehicleState &ending_state_before_buffer, const carma_planning_msgs::msg::VehicleState &state, const GeneralTrajConfig &general_config, const DetailedTrajConfig &detailed_config) |
| Creates geometry profile to return a point speed pair struct for INTERSECTION_TRANSIT maneuver types (by converting it to LANE_FOLLOW) More... | |
| double | findSpeedLimit (const lanelet::ConstLanelet &llt, const carma_wm::WorldModelConstPtr &wm) const |
| Given a Lanelet, find its associated Speed Limit. More... | |
| void | logDebugInfoAboutPreviousTrajectory () |
| Logs debug information about the previously planned trajectory. More... | |
| bool | shouldUseLastTrajectory (TSCase new_case, bool is_new_case_successful, const rclcpp::Time ¤t_time) |
| Determines whether the last trajectory should be reused based on the planning case. Should use last case if 1) last traj is valid AND last case is the same as new case, OR 2) last traj is valid AND within certain evaluation zone before the intersection where the new case is not successful but last case is. More... | |
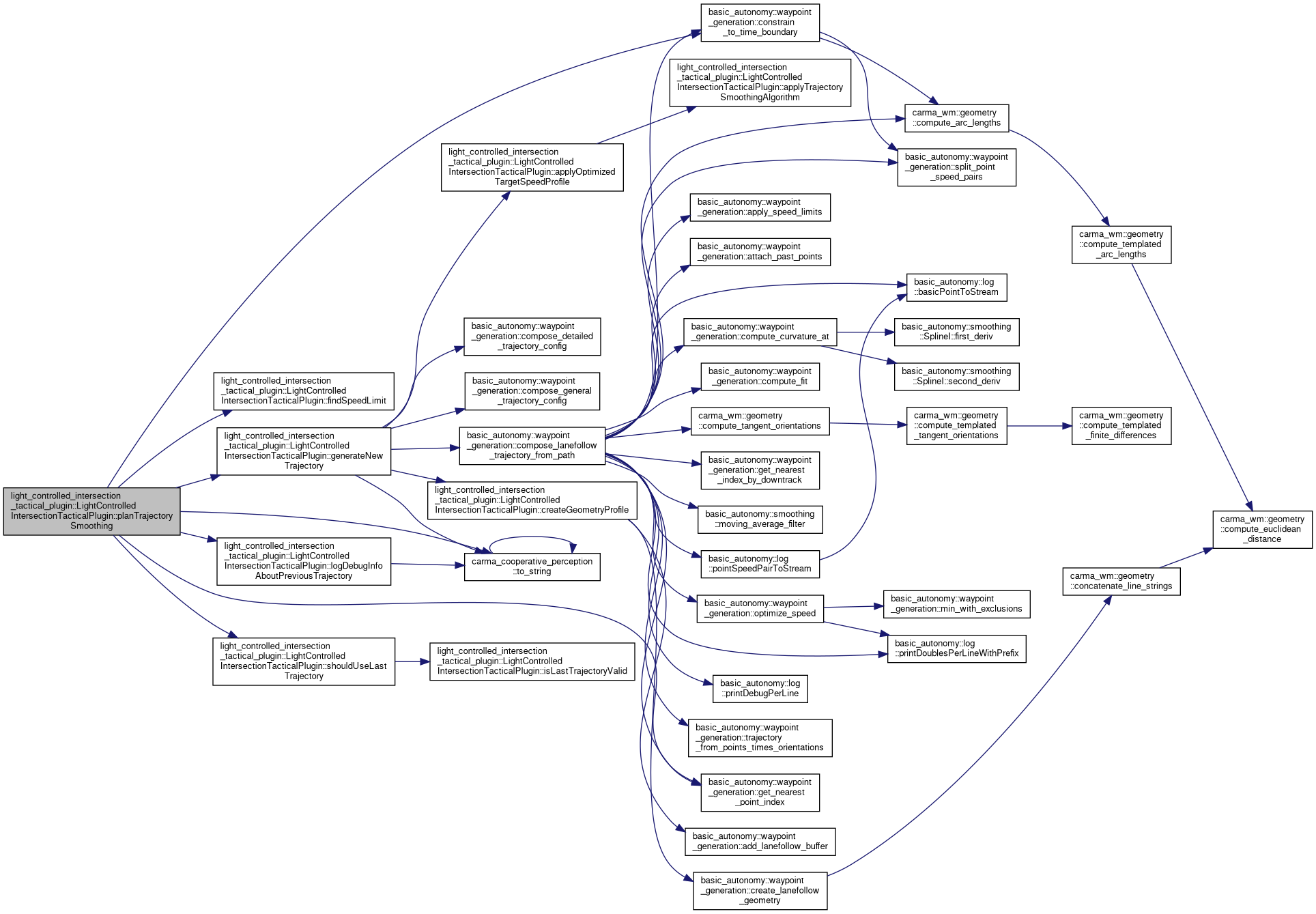
| void | planTrajectorySmoothing (carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr req, carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr resp) |
| Smooths the trajectory as part of the trajectory planning process. More... | |
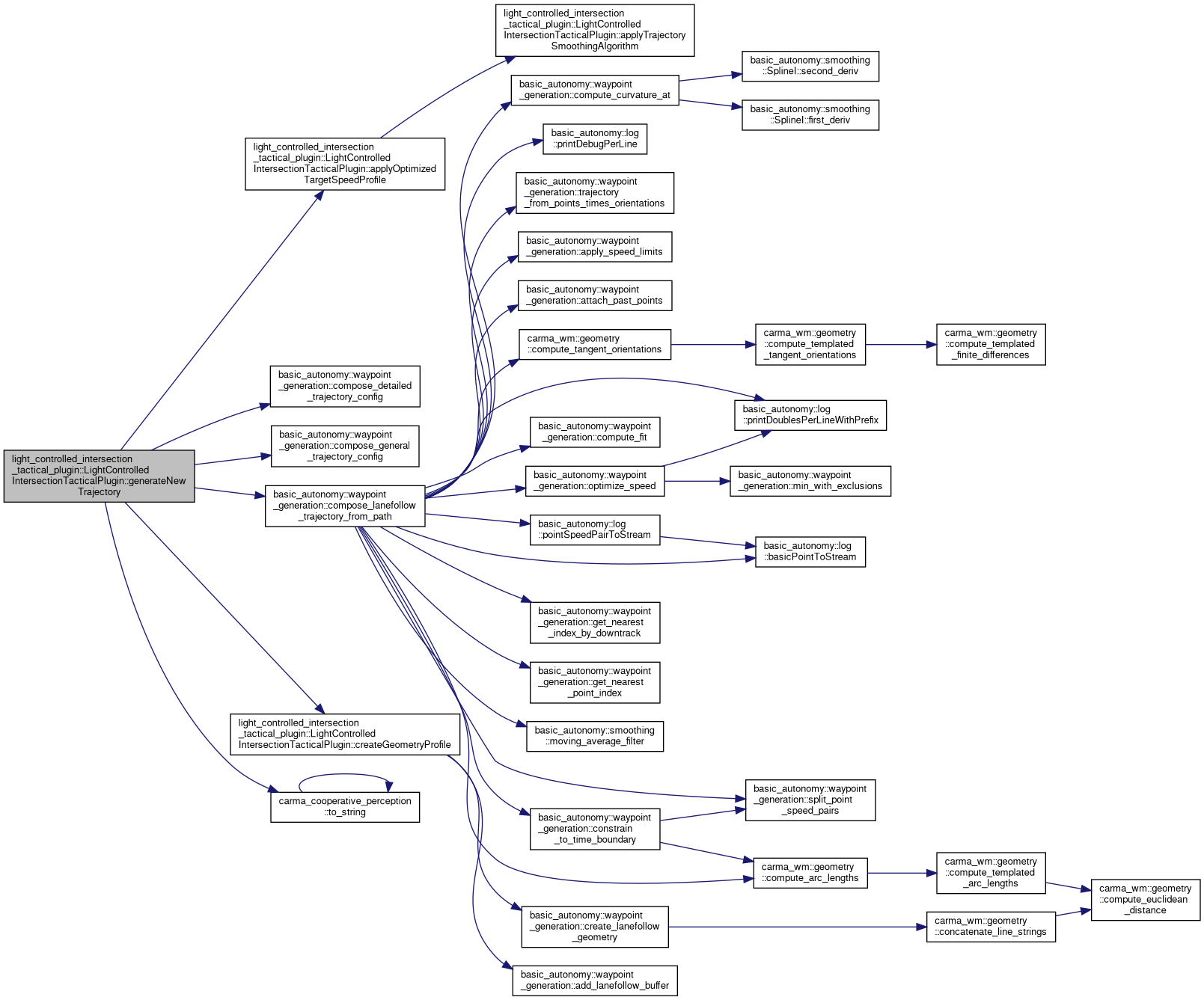
| carma_planning_msgs::msg::TrajectoryPlan | generateNewTrajectory (const std::vector< carma_planning_msgs::msg::Maneuver > &maneuver_plan, const carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr &req, std::vector< double > &final_speeds) |
| Generates a new trajectory plan based on the provided maneuver plan and request. NOTE: This function plans for the entire maneuver input and doesn't time bound it. More... | |
| bool | isLastTrajectoryValid (const rclcpp::Time ¤t_time, double min_remaining_time_seconds=0.0) const |
| Checks if the last trajectory plan remains valid based on the current time. More... | |
| FRIEND_TEST (LCITacticalPluginTest, applyTrajectorySmoothingAlgorithm) | |
| FRIEND_TEST (LCITacticalPluginTest, applyOptimizedTargetSpeedProfile) | |
| FRIEND_TEST (LCITacticalPluginTest, planTrajectorySmoothing) | |
| FRIEND_TEST (LCITacticalPluginTest, createGeometryProfile) | |
| FRIEND_TEST (LCITacticalPluginTest, planTrajectoryCB) | |
| FRIEND_TEST (LCITacticalPluginTest, setConfig) | |
Private Attributes | |
| carma_wm::WorldModelConstPtr | wm_ |
| Config | config_ |
| std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | nh_ |
| uint32_t | street_msg_timestamp_ = 0.0 |
| uint32_t | scheduled_stop_time_ = 0.0 |
| uint32_t | scheduled_enter_time_ = 0.0 |
| uint32_t | scheduled_depart_time_ = 0.0 |
| uint32_t | scheduled_latest_depart_time_ = 0.0 |
| bool | is_allowed_int_ = false |
| double | speed_limit_ = 11.176 |
| boost::optional< TSCase > | last_case_ |
| boost::optional< bool > | is_last_case_successful_ |
| carma_planning_msgs::msg::TrajectoryPlan | last_trajectory_time_unbound_ |
| carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > | yield_client_ |
| const std::string | LCI_TACTICAL_LOGGER = "light_controlled_intersection_tactical_plugin" |
| carma_planning_msgs::msg::VehicleState | ending_state_before_buffer_ |
| rclcpp::Time | latest_traj_request_header_stamp_ |
| double | epsilon_ = 0.001 |
| double | current_downtrack_ = 0.0 |
| double | last_successful_ending_downtrack_ |
| double | last_successful_scheduled_entry_time_ |
| std::string | plugin_name_ |
| DebugPublisher | debug_publisher_ |
| carma_debug_ros2_msgs::msg::TrajectoryCurvatureSpeeds | debug_msg_ |
| std::vector< double > | last_speeds_time_unbound_ |
| std::string | light_controlled_intersection_strategy_ = "Carma/signalized_intersection" |
Detailed Description
Class containing primary business logic for the Light Controlled Intersection Tactical Plugin.
Definition at line 105 of file light_controlled_intersection_tactical_plugin.hpp.
Constructor & Destructor Documentation
◆ LightControlledIntersectionTacticalPlugin()
| light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::LightControlledIntersectionTacticalPlugin | ( | carma_wm::WorldModelConstPtr | wm, |
| const Config & | config, | ||
| const DebugPublisher & | debug_publisher, | ||
| const std::string & | plugin_name, | ||
| std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | nh | ||
| ) |
LightControlledIntersectionTacticalPlugin constructor.
Definition at line 23 of file light_controlled_intersection_tactical_plugin.cpp.
Member Function Documentation
◆ applyOptimizedTargetSpeedProfile()
|
private |
Apply optimized target speeds to the trajectory determined for fixed-time and actuated signals. Based on TSMO USE CASE 2. Chapter 2. Trajectory Smoothing.
- Parameters
-
maneuver Maneuver associated that has starting downtrack and desired entry time starting_speed Starting speed of the vehicle points The set of points with raw speed limits whose speed profile to be changed. These points must be in the same lane as the vehicle and must extend in front of it though it is fine if they also extend behind it.
Definition at line 519 of file light_controlled_intersection_tactical_plugin.cpp.
References light_controlled_intersection_tactical_plugin::TrajectoryParams::a1_, light_controlled_intersection_tactical_plugin::TrajectoryParams::a2_, light_controlled_intersection_tactical_plugin::TrajectoryParams::a3_, applyTrajectorySmoothingAlgorithm(), GET_MANEUVER_PROPERTY, light_controlled_intersection_tactical_plugin::TrajectoryParams::v1_, light_controlled_intersection_tactical_plugin::TrajectoryParams::v2_, light_controlled_intersection_tactical_plugin::TrajectoryParams::v3_, wm_, light_controlled_intersection_tactical_plugin::TrajectoryParams::x1_, light_controlled_intersection_tactical_plugin::TrajectoryParams::x2_, and light_controlled_intersection_tactical_plugin::TrajectoryParams::x3_.
Referenced by generateNewTrajectory().


◆ applyTrajectorySmoothingAlgorithm()
|
private |
Creates a speed profile according to case one or two of the light controlled intersection, where the vehicle accelerates (then cruises if needed) and decelerates into the intersection.
- Parameters
-
wm world_model pointer points_and_target_speeds of centerline points paired with speed limits whose speeds are to be modified: start_dist starting downtrack of the maneuver to be planned (excluding buffer points) in m remaining_dist distance for the maneuver to be planned (excluding buffer points) in m starting_speed starting speed at the start of the maneuver in m/s departure_speed ending speed of the maneuver a.k.a entry speed into the intersection m/s tsp trajectory smoothing parameters NOTE: Cruising speed profile is applied (case 1) if speed before deceleration is higher than speed limit. Otherwise Case 2. NOTE: when applying the speed profile, the function ignores buffer points beyond start_dist and end_dist. Internally uses: config_.back_distance and speed_limit_
Definition at line 432 of file light_controlled_intersection_tactical_plugin.cpp.
References light_controlled_intersection_tactical_plugin::TrajectoryParams::a1_, light_controlled_intersection_tactical_plugin::TrajectoryParams::a2_, light_controlled_intersection_tactical_plugin::TrajectoryParams::a3_, config_, epsilon_, LCI_TACTICAL_LOGGER, light_controlled_intersection_tactical_plugin::Config::minimum_speed, process_traj_logs::point, speed_limit_, light_controlled_intersection_tactical_plugin::TrajectoryParams::v1_, light_controlled_intersection_tactical_plugin::TrajectoryParams::v2_, light_controlled_intersection_tactical_plugin::TrajectoryParams::v3_, light_controlled_intersection_tactical_plugin::TrajectoryParams::x1_, light_controlled_intersection_tactical_plugin::TrajectoryParams::x2_, and light_controlled_intersection_tactical_plugin::TrajectoryParams::x3_.
Referenced by applyOptimizedTargetSpeedProfile().

◆ createGeometryProfile()
|
private |
Creates geometry profile to return a point speed pair struct for INTERSECTION_TRANSIT maneuver types (by converting it to LANE_FOLLOW)
- Parameters
-
maneuvers The list of maneuvers to convert to geometry points and calculate associated raw speed limits max_starting_downtrack The maximum downtrack that is allowed for the first maneuver. This should be set to the vehicle position or earlier. If the first maneuver exceeds this then it's downtrack will be shifted to this value. wm Pointer to intialized world model for semantic map access ending_state_before_buffer reference to Vehicle state, which is state before applying extra points for curvature calculation that are removed later state The vehicle state at the time the function is called general_config Basic autonomy struct defined to load general config parameters from tactical plugins detailed_config Basic autonomy struct defined to load detailed config parameters from tactical plugins
- Returns
- A vector of point speed pair struct which contains geometry points as basicpoint::lanelet2d and speed as a double for the maneuver NOTE: This function is a slightly modified version of the same function in basic_autonomy library and currently only plans for the first maneuver
Definition at line 564 of file light_controlled_intersection_tactical_plugin.cpp.
References basic_autonomy::waypoint_generation::add_lanefollow_buffer(), basic_autonomy::waypoint_generation::create_lanefollow_geometry(), GET_MANEUVER_PROPERTY, and LCI_TACTICAL_LOGGER.
Referenced by generateNewTrajectory().


◆ findSpeedLimit()
|
private |
Given a Lanelet, find its associated Speed Limit.
- Parameters
-
llt Constant Lanelet object. wm World model pointer to query additional information.
- Exceptions
-
std::invalid_argument if the speed limit could not be retrieved.
- Returns
- Speed limit in meters per second.
Definition at line 551 of file light_controlled_intersection_tactical_plugin.cpp.
Referenced by planTrajectorySmoothing().

◆ FRIEND_TEST() [1/6]
|
private |
◆ FRIEND_TEST() [2/6]
|
private |
◆ FRIEND_TEST() [3/6]
|
private |
◆ FRIEND_TEST() [4/6]
|
private |
◆ FRIEND_TEST() [5/6]
|
private |
◆ FRIEND_TEST() [6/6]
|
private |
◆ generateNewTrajectory()
|
private |
Generates a new trajectory plan based on the provided maneuver plan and request. NOTE: This function plans for the entire maneuver input and doesn't time bound it.
- Parameters
-
maneuver_plan A vector of maneuver messages defining the planned maneuvers. The first maneuver is expected to have all the necessary TS parameters. req Shared pointer to the trajectory planning request message. final_speeds A vector that will be populated with the final speeds for each point as it is useful for late operations or debugging
- Returns
- A newly generated trajectory plan message.
Definition at line 105 of file light_controlled_intersection_tactical_plugin.cpp.
References applyOptimizedTargetSpeedProfile(), light_controlled_intersection_tactical_plugin::Config::back_distance, light_controlled_intersection_tactical_plugin::Config::buffer_ending_downtrack, basic_autonomy::waypoint_generation::compose_detailed_trajectory_config(), basic_autonomy::waypoint_generation::compose_general_trajectory_config(), basic_autonomy::waypoint_generation::compose_lanefollow_trajectory_from_path(), config_, createGeometryProfile(), current_downtrack_, light_controlled_intersection_tactical_plugin::Config::curvature_moving_average_window_size, light_controlled_intersection_tactical_plugin::Config::curve_resample_step_size, debug_msg_, light_controlled_intersection_tactical_plugin::Config::default_downsample_ratio, ending_state_before_buffer_, light_controlled_intersection_tactical_plugin::Config::lateral_accel_limit, light_controlled_intersection_tactical_plugin::Config::minimum_speed, light_controlled_intersection_tactical_plugin::Config::speed_moving_average_window_size, carma_cooperative_perception::to_string(), light_controlled_intersection_tactical_plugin::Config::turn_downsample_ratio, light_controlled_intersection_tactical_plugin::Config::vehicle_accel_limit, and wm_.
Referenced by planTrajectorySmoothing().

◆ isLastTrajectoryValid()
|
private |
Checks if the last trajectory plan remains valid based on the current time.
This function verifies that the previously generated trajectory still meets timing and duration requirements. It can also enforce a minimum remaining duration if specified.
- Parameters
-
current_time The current time stamp. min_remaining_time_seconds Optional parameter specifying the minimum required remaining time (in seconds) for the trajectory to be considered valid.
- Returns
- True if the last trajectory is valid, false otherwise.
Definition at line 34 of file light_controlled_intersection_tactical_plugin.cpp.
References is_last_case_successful_, last_case_, last_speeds_time_unbound_, and last_trajectory_time_unbound_.
Referenced by shouldUseLastTrajectory().

◆ logDebugInfoAboutPreviousTrajectory()
|
private |
Logs debug information about the previously planned trajectory.
This helper function outputs detailed internal state and trajectory information that can be used for debugging trajectory planning issues.
Definition at line 158 of file light_controlled_intersection_tactical_plugin.cpp.
References current_downtrack_, is_last_case_successful_, last_case_, last_speeds_time_unbound_, last_successful_ending_downtrack_, last_successful_scheduled_entry_time_, last_trajectory_time_unbound_, latest_traj_request_header_stamp_, LCI_TACTICAL_LOGGER, and carma_cooperative_perception::to_string().
Referenced by planTrajectorySmoothing().


◆ planTrajectoryCB()
| void light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::planTrajectoryCB | ( | carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr | req, |
| carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr | resp | ||
| ) |
Function to process the light controlled intersection tactical plugin service call for trajectory planning.
- Parameters
-
req The service request resp The service response
Definition at line 400 of file light_controlled_intersection_tactical_plugin.cpp.
References config_, light_controlled_intersection_tactical_plugin::Config::enable_object_avoidance, latest_traj_request_header_stamp_, LCI_TACTICAL_LOGGER, basic_autonomy::waypoint_generation::modify_trajectory_to_yield_to_obstacles(), nh_, planTrajectorySmoothing(), light_controlled_intersection_tactical_plugin::Config::tactical_plugin_service_call_timeout, and yield_client_.
◆ planTrajectorySmoothing()
|
private |
Smooths the trajectory as part of the trajectory planning process.
This function takes a trajectory planning request, applies smoothing algorithms to refine the trajectory, and populates the response with the smoothed trajectory. NOTE: Function is called by planTrajectoryCB and doesn't use yield client
- Parameters
-
req Shared pointer to the trajectory planning request message. resp Shared pointer to the trajectory planning response message to be filled.
Definition at line 183 of file light_controlled_intersection_tactical_plugin.cpp.
References config_, basic_autonomy::waypoint_generation::constrain_to_time_boundary(), current_downtrack_, debug_msg_, debug_publisher_, findSpeedLimit(), generateNewTrajectory(), GET_MANEUVER_PROPERTY, basic_autonomy::waypoint_generation::get_nearest_point_index(), is_last_case_successful_, last_case_, last_speeds_time_unbound_, last_successful_ending_downtrack_, last_successful_scheduled_entry_time_, last_trajectory_time_unbound_, LCI_TACTICAL_LOGGER, light_controlled_intersection_strategy_, logDebugInfoAboutPreviousTrajectory(), plugin_name_, shouldUseLastTrajectory(), speed_limit_, carma_cooperative_perception::to_string(), light_controlled_intersection_tactical_plugin::Config::trajectory_time_length, and wm_.
Referenced by planTrajectoryCB().

◆ set_yield_client()
| void light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::set_yield_client | ( | carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > | client | ) |
set the yield service
- Parameters
-
yield_srv input yield service
Definition at line 616 of file light_controlled_intersection_tactical_plugin.cpp.
References yield_client_.
◆ setConfig()
| void light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::setConfig | ( | const Config & | config | ) |
Setter function to set a new config for this object.
- Parameters
-
config The new config to be used by this object
Definition at line 611 of file light_controlled_intersection_tactical_plugin.cpp.
References config_.
◆ shouldUseLastTrajectory()
|
private |
Determines whether the last trajectory should be reused based on the planning case. Should use last case if 1) last traj is valid AND last case is the same as new case, OR 2) last traj is valid AND within certain evaluation zone before the intersection where the new case is not successful but last case is.
- Parameters
-
new_case An enumerated type representing the new trajectory planning case. is_new_case_successful A boolean flag indicating if the new trajectory planning was successful. current_time The current time stamp.
- Returns
- True if the last trajectory should be used, false otherwise.
Definition at line 70 of file light_controlled_intersection_tactical_plugin.cpp.
References config_, current_downtrack_, light_controlled_intersection_tactical_plugin::Config::dist_before_intersection_to_force_last_traj, is_last_case_successful_, isLastTrajectoryValid(), last_case_, last_successful_ending_downtrack_, last_successful_scheduled_entry_time_, light_controlled_intersection_tactical_plugin::Config::period_before_intersection_to_force_last_traj, and light_controlled_intersection_tactical_plugin::Config::vehicle_response_lag.
Referenced by planTrajectorySmoothing().


Member Data Documentation
◆ config_
|
private |
Definition at line 113 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by applyTrajectorySmoothingAlgorithm(), generateNewTrajectory(), planTrajectoryCB(), planTrajectorySmoothing(), setConfig(), and shouldUseLastTrajectory().
◆ current_downtrack_
|
private |
Definition at line 142 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by generateNewTrajectory(), logDebugInfoAboutPreviousTrajectory(), planTrajectorySmoothing(), and shouldUseLastTrajectory().
◆ debug_msg_
|
private |
Definition at line 149 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by generateNewTrajectory(), and planTrajectorySmoothing().
◆ debug_publisher_
|
private |
Definition at line 148 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by planTrajectorySmoothing().
◆ ending_state_before_buffer_
|
private |
Definition at line 137 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by generateNewTrajectory().
◆ epsilon_
|
private |
Definition at line 139 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by applyTrajectorySmoothingAlgorithm().
◆ is_allowed_int_
|
private |
Definition at line 129 of file light_controlled_intersection_tactical_plugin.hpp.
◆ is_last_case_successful_
|
private |
Definition at line 133 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by isLastTrajectoryValid(), logDebugInfoAboutPreviousTrajectory(), planTrajectorySmoothing(), and shouldUseLastTrajectory().
◆ last_case_
|
private |
Definition at line 132 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by isLastTrajectoryValid(), logDebugInfoAboutPreviousTrajectory(), planTrajectorySmoothing(), and shouldUseLastTrajectory().
◆ last_speeds_time_unbound_
|
private |
Definition at line 150 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by isLastTrajectoryValid(), logDebugInfoAboutPreviousTrajectory(), and planTrajectorySmoothing().
◆ last_successful_ending_downtrack_
|
private |
Definition at line 144 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by logDebugInfoAboutPreviousTrajectory(), planTrajectorySmoothing(), and shouldUseLastTrajectory().
◆ last_successful_scheduled_entry_time_
|
private |
Definition at line 145 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by logDebugInfoAboutPreviousTrajectory(), planTrajectorySmoothing(), and shouldUseLastTrajectory().
◆ last_trajectory_time_unbound_
|
private |
Definition at line 134 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by isLastTrajectoryValid(), logDebugInfoAboutPreviousTrajectory(), and planTrajectorySmoothing().
◆ latest_traj_request_header_stamp_
|
private |
Definition at line 138 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by logDebugInfoAboutPreviousTrajectory(), and planTrajectoryCB().
◆ LCI_TACTICAL_LOGGER
|
private |
Definition at line 136 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by applyTrajectorySmoothingAlgorithm(), createGeometryProfile(), logDebugInfoAboutPreviousTrajectory(), planTrajectoryCB(), and planTrajectorySmoothing().
◆ light_controlled_intersection_strategy_
|
private |
Definition at line 152 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by planTrajectorySmoothing().
◆ nh_
|
private |
Definition at line 115 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by planTrajectoryCB().
◆ plugin_name_
|
private |
Definition at line 147 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by planTrajectorySmoothing().
◆ scheduled_depart_time_
|
private |
Definition at line 125 of file light_controlled_intersection_tactical_plugin.hpp.
◆ scheduled_enter_time_
|
private |
Definition at line 123 of file light_controlled_intersection_tactical_plugin.hpp.
◆ scheduled_latest_depart_time_
|
private |
Definition at line 127 of file light_controlled_intersection_tactical_plugin.hpp.
◆ scheduled_stop_time_
|
private |
Definition at line 121 of file light_controlled_intersection_tactical_plugin.hpp.
◆ speed_limit_
|
private |
Definition at line 131 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by applyTrajectorySmoothingAlgorithm(), and planTrajectorySmoothing().
◆ street_msg_timestamp_
|
private |
Definition at line 119 of file light_controlled_intersection_tactical_plugin.hpp.
◆ wm_
|
private |
Definition at line 110 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by applyOptimizedTargetSpeedProfile(), generateNewTrajectory(), and planTrajectorySmoothing().
◆ yield_client_
|
private |
Definition at line 135 of file light_controlled_intersection_tactical_plugin.hpp.
Referenced by planTrajectoryCB(), and set_yield_client().
The documentation for this class was generated from the following files:
- light_controlled_intersection_tactical_plugin/include/light_controlled_intersection_tactical_plugin/light_controlled_intersection_tactical_plugin.hpp
- light_controlled_intersection_tactical_plugin/src/light_controlled_intersection_tactical_plugin.cpp