Class containing primary business logic for the In-Lane Cruising Plugin. More...
#include <yield_plugin.hpp>
Public Member Functions | |
| YieldPlugin (std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > nh, carma_wm::WorldModelConstPtr wm, YieldPluginConfig config, MobilityResponseCB mobility_response_publisher, LaneChangeStatusCB lc_status_publisher) | |
| Constructor. More... | |
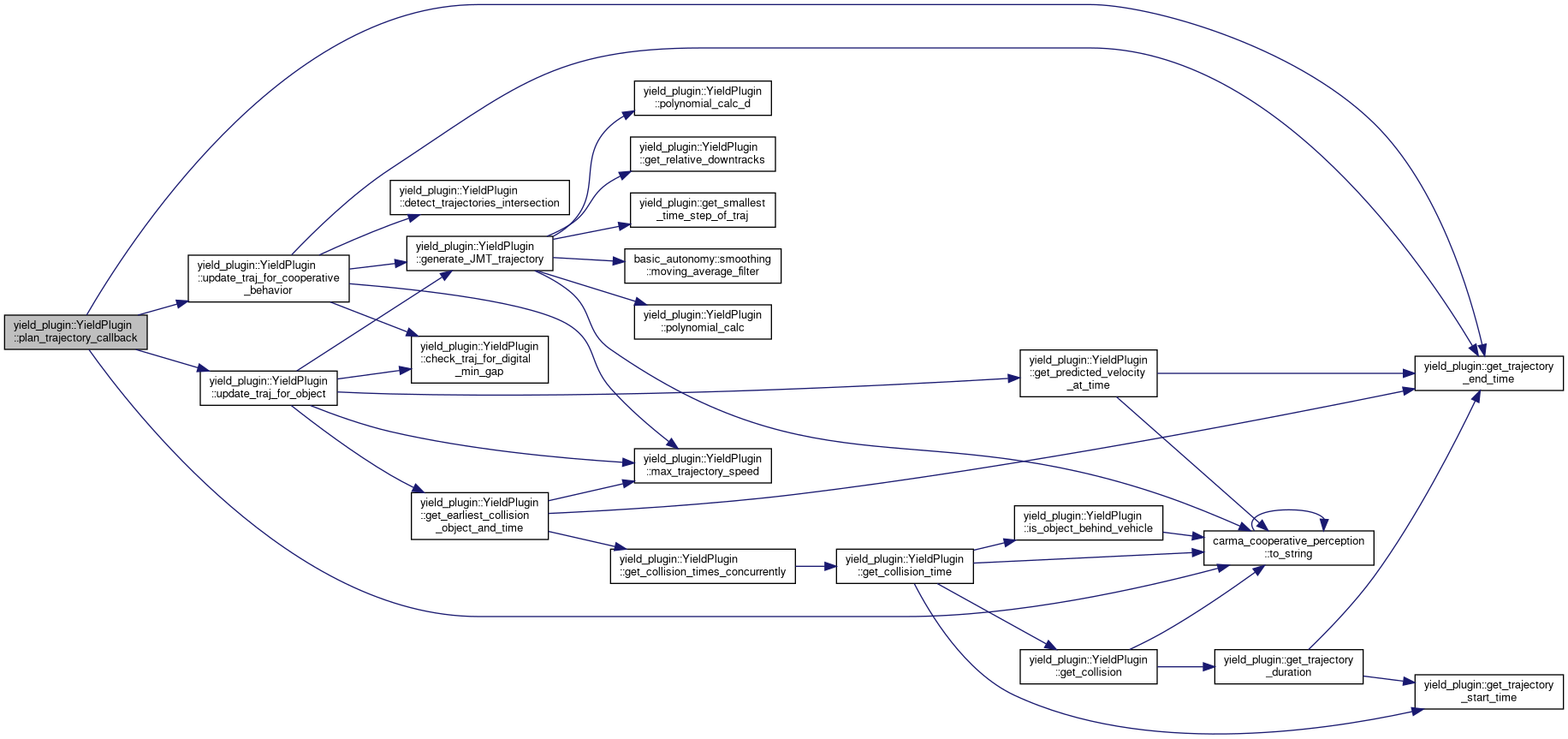
| void | plan_trajectory_callback (carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr req, carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr resp) |
| Service callback for trajectory planning. More... | |
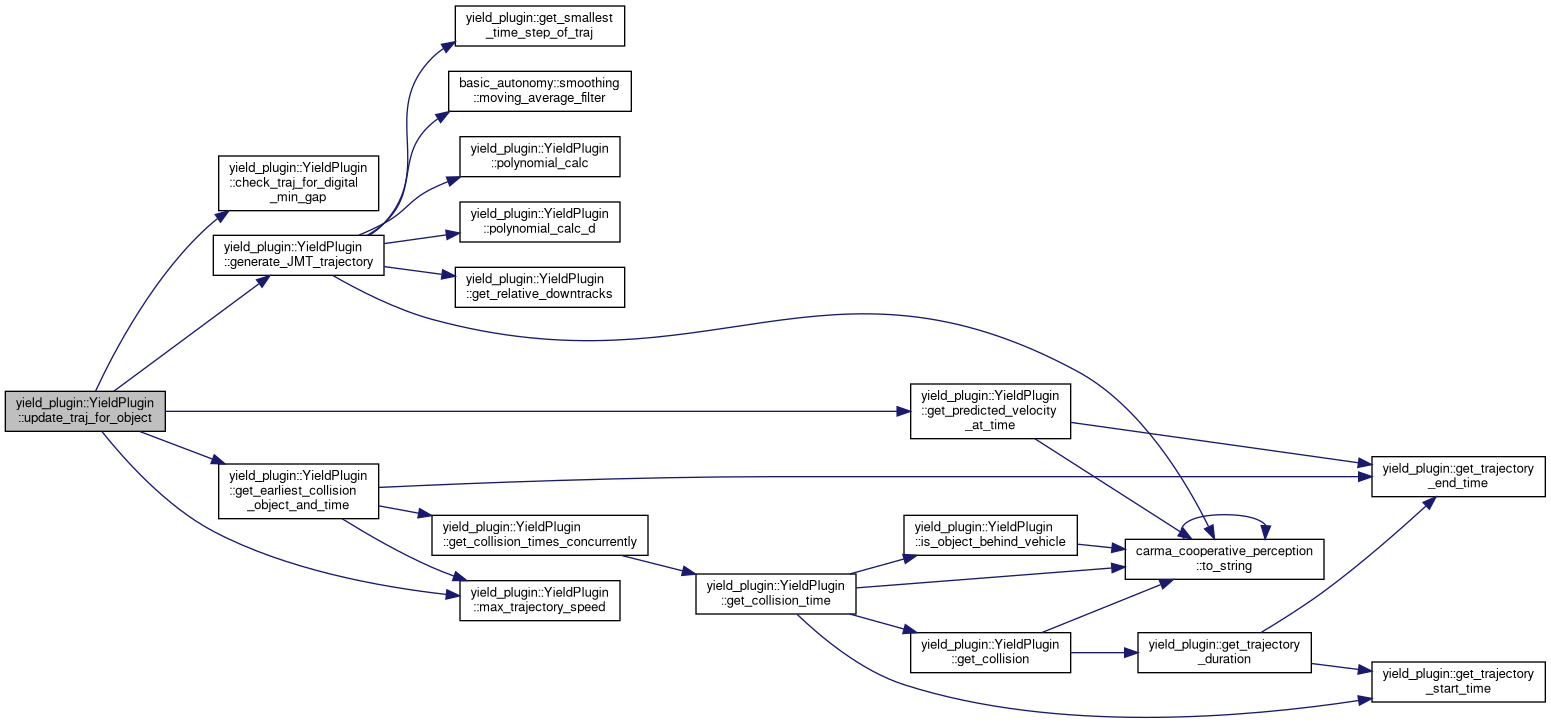
| carma_planning_msgs::msg::TrajectoryPlan | update_traj_for_object (const carma_planning_msgs::msg::TrajectoryPlan &original_tp, const std::vector< carma_perception_msgs::msg::ExternalObject > &external_objects, double initial_velocity) |
| trajectory is modified to safely avoid obstacles on the road More... | |
| double | polynomial_calc (std::vector< double > coeff, double x) const |
| calculate quintic polynomial equation for a given x More... | |
| double | polynomial_calc_d (std::vector< double > coeff, double x) const |
| calculate derivative of quintic polynomial equation for a given x More... | |
| double | max_trajectory_speed (const std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > &trajectory_points, double timestamp_in_sec_to_search_until) const |
| calculates the maximum speed in a set of tajectory points More... | |
| std::vector< double > | get_relative_downtracks (const carma_planning_msgs::msg::TrajectoryPlan &trajectory_plan) const |
| calculates distance between trajectory points in a plan More... | |
| void | mobilityrequest_cb (const carma_v2x_msgs::msg::MobilityRequest::UniquePtr msg) |
| callback for mobility request More... | |
| void | bsm_cb (const carma_v2x_msgs::msg::BSM::UniquePtr msg) |
| callback for bsm message More... | |
| std::vector< lanelet::BasicPoint2d > | convert_eceftrajectory_to_mappoints (const carma_v2x_msgs::msg::Trajectory &ecef_trajectory) const |
| convert a carma trajectory from ecef frame to map frame ecef trajectory consists of the point and a set of offsets with reference to the point More... | |
| lanelet::BasicPoint2d | ecef_to_map_point (const carma_v2x_msgs::msg::LocationECEF &ecef_point) const |
| convert a point in ecef frame (in cm) into map frame (in meters) More... | |
| carma_v2x_msgs::msg::MobilityResponse | compose_mobility_response (const std::string &resp_recipient_id, const std::string &req_plan_id, bool response) const |
| compose a mobility response message More... | |
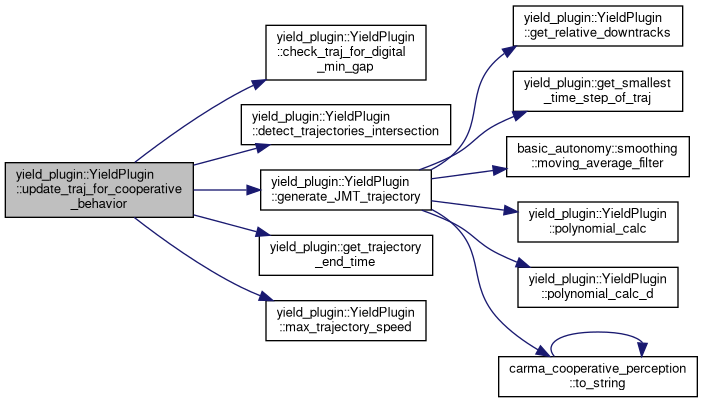
| carma_planning_msgs::msg::TrajectoryPlan | generate_JMT_trajectory (const carma_planning_msgs::msg::TrajectoryPlan &original_tp, double initial_pos, double goal_pos, double initial_velocity, double goal_velocity, double planning_time, double original_max_speed) |
| generate a Jerk Minimizing Trajectory(JMT) with the provided start and end conditions More... | |
| carma_planning_msgs::msg::TrajectoryPlan | update_traj_for_cooperative_behavior (const carma_planning_msgs::msg::TrajectoryPlan &original_tp, double current_speed) |
| update trajectory for yielding to an incoming cooperative behavior More... | |
| std::vector< std::pair< int, lanelet::BasicPoint2d > > | detect_trajectories_intersection (std::vector< lanelet::BasicPoint2d > self_trajectory, std::vector< lanelet::BasicPoint2d > incoming_trajectory) const |
| detect intersection point(s) of two trajectories More... | |
| void | set_incoming_request_info (std::vector< lanelet::BasicPoint2d > req_trajectory, double req_speed, double req_planning_time, double req_timestamp) |
| set values for member variables related to cooperative behavior More... | |
| void | lookup_ecef_to_map_transform () |
| Looks up the transform between map and earth frames, and sets the member variable. More... | |
| double | check_traj_for_digital_min_gap (const carma_planning_msgs::msg::TrajectoryPlan &original_tp) const |
| checks trajectory for minimum gap associated with it from the road More... | |
| void | set_georeference_string (const std::string &georeference) |
| Setter for map projection string to define lat/lon -> map conversion. More... | |
| void | set_external_objects (const std::vector< carma_perception_msgs::msg::ExternalObject > &object_list) |
| Setter for external objects with predictions in the environment. More... | |
| void | update_route_llt_cache () |
| Rebuild the cached route lanelet polygons and IDs from the current route. Should be called once whenever the route changes via setRouteCallback(). More... | |
| std::optional< GetCollisionResult > | get_collision (const carma_planning_msgs::msg::TrajectoryPlan &ego_trajectory, const std::vector< carma_perception_msgs::msg::PredictedState > &object_predictions, double collision_radius, double ego_max_speed) |
| Return naive collision time and locations based on collision radius given two trajectories with one being obstacle's predicted steps. More... | |
| std::optional< rclcpp::Time > | get_collision_time (const carma_planning_msgs::msg::TrajectoryPlan &original_tp, const carma_perception_msgs::msg::ExternalObject &curr_obstacle, double original_tp_max_speed) |
| Return collision time given two trajectories with one being external object with predicted steps. More... | |
| bool | is_object_behind_vehicle (uint32_t object_id, const rclcpp::Time &collision_time, double vehicle_point, double object_downtrack) |
| Check if object location is behind the vehicle using estimates of the vehicle's length and route downtracks. More... | |
| std::optional< std::pair< carma_perception_msgs::msg::ExternalObject, double > > | get_earliest_collision_object_and_time (const carma_planning_msgs::msg::TrajectoryPlan &original_tp, const std::vector< carma_perception_msgs::msg::ExternalObject > &external_objects) |
| Return the earliest collision object and time of collision pair from the given trajectory and list of external objects with predicted states. Function first filters obstacles based on whether if their any of predicted state will be on the route. Only then, the logic compares trajectory and predicted states. More... | |
| std::unordered_map< uint32_t, rclcpp::Time > | get_collision_times_concurrently (const carma_planning_msgs::msg::TrajectoryPlan &original_tp, const std::vector< carma_perception_msgs::msg::ExternalObject > &external_objects, double original_tp_max_speed) |
| Given the list of objects with predicted states, get all collision times concurrently using multi-threading. More... | |
| double | get_predicted_velocity_at_time (const geometry_msgs::msg::Twist &object_velocity_in_map_frame, const carma_planning_msgs::msg::TrajectoryPlan &original_tp, double timestamp_in_sec_to_predict) |
| Given the object velocity in map frame with x,y components, this function returns the projected velocity along the trajectory at given time. More... | |
Private Member Functions | |
| std::unordered_map< uint32_t, rclcpp::Time > | get_collision_times_concurrently_cpu (const carma_planning_msgs::msg::TrajectoryPlan &original_tp, const std::vector< carma_perception_msgs::msg::ExternalObject > &external_objects, double original_tp_max_speed) |
| CPU implementation of get_collision_times_concurrently. Launches one thread per external object and computes get_collision_time for each in parallel. More... | |
| std::unordered_map< uint32_t, rclcpp::Time > | get_collision_times_concurrently_cuda (const carma_planning_msgs::msg::TrajectoryPlan &original_tp, const std::vector< carma_perception_msgs::msg::ExternalObject > &external_objects, double original_tp_max_speed) |
| CUDA implementation of get_collision_times_concurrently. Filters objects to those with on-route predictions, then batches the collision check across all objects on the GPU. Falls back to get_collision_times_concurrently_cpu if no CUDA device is available or on error. More... | |
| std::pair< bool, int > | find_on_route_in_predictions (const std::vector< carma_perception_msgs::msg::PredictedState > &predictions, int stride, bool zero_speed) const |
| Check whether any predicted state of an object falls within the route lanelet polygons. More... | |
| std::string | bsmIDtoString (carma_v2x_msgs::msg::BSMCoreData bsm_core) |
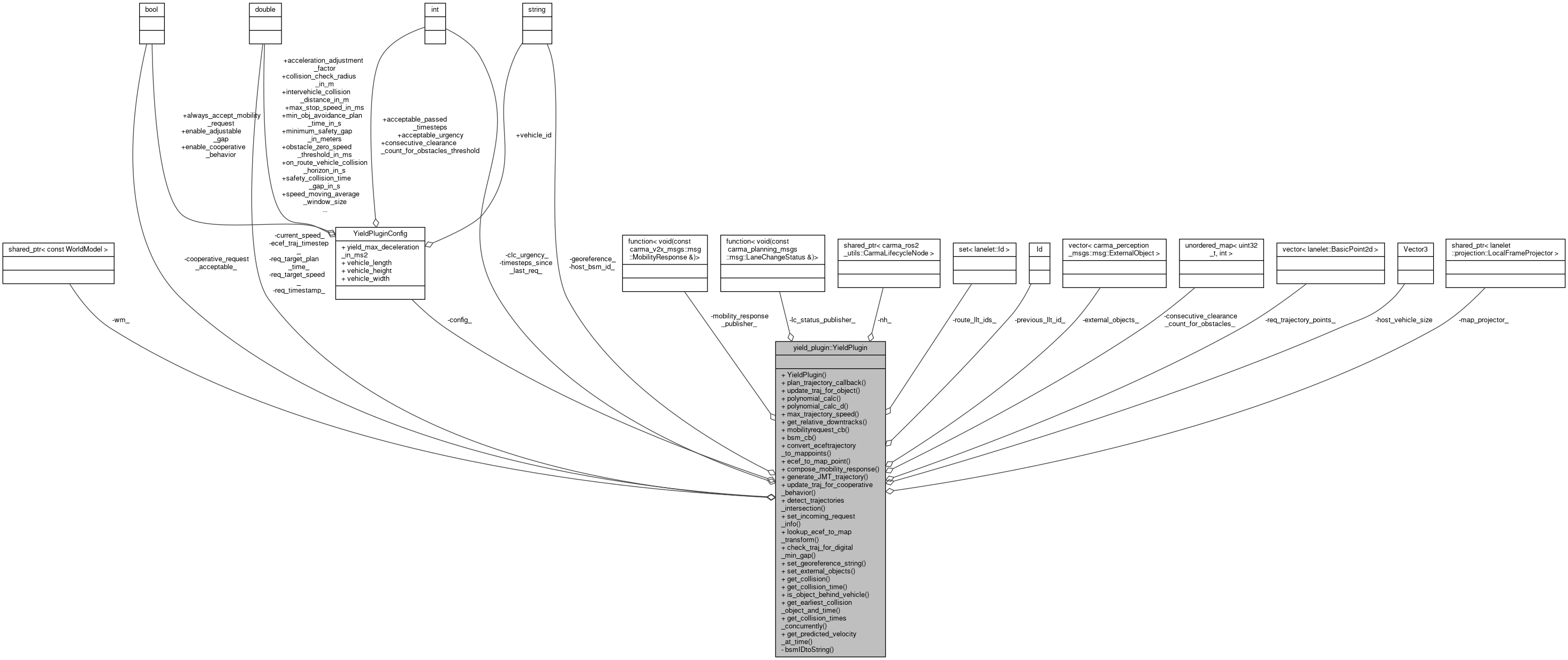
Private Attributes | |
| carma_wm::WorldModelConstPtr | wm_ |
| YieldPluginConfig | config_ |
| MobilityResponseCB | mobility_response_publisher_ |
| LaneChangeStatusCB | lc_status_publisher_ |
| std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | nh_ |
| std::set< lanelet::Id > | route_llt_ids_ |
| std::vector< lanelet::ConstLanelet > | route_llt_polygons_ |
| lanelet::Id | previous_llt_id_ |
| std::vector< carma_perception_msgs::msg::ExternalObject > | external_objects_ |
| std::unordered_map< uint32_t, int > | consecutive_clearance_count_for_obstacles_ |
| bool | cooperative_request_acceptable_ = false |
| std::vector< lanelet::BasicPoint2d > | req_trajectory_points_ |
| double | req_target_speed_ = 0 |
| double | req_timestamp_ = 0 |
| double | req_target_plan_time_ = 0 |
| int | timesteps_since_last_req_ = 0 |
| int | clc_urgency_ = 0 |
| std::optional< double > | last_speed_ = std::nullopt |
| std::optional< rclcpp::Time > | last_speed_time_ = std::nullopt |
| std::optional< rclcpp::Time > | first_time_stopped_to_prevent_collision_ = std::nullopt |
| std::optional< carma_planning_msgs::msg::TrajectoryPlan > | last_traj_plan_committed_to_stopping_ = std::nullopt |
| double | ecef_traj_timestep_ = 0.1 |
| geometry_msgs::msg::Vector3 | host_vehicle_size |
| double | current_speed_ |
| std::string | host_bsm_id_ |
| std::string | georeference_ {""} |
| std::shared_ptr< lanelet::projection::LocalFrameProjector > | map_projector_ |
Detailed Description
Class containing primary business logic for the In-Lane Cruising Plugin.
Definition at line 77 of file yield_plugin.hpp.
Constructor & Destructor Documentation
◆ YieldPlugin()
| yield_plugin::YieldPlugin::YieldPlugin | ( | std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | nh, |
| carma_wm::WorldModelConstPtr | wm, | ||
| YieldPluginConfig | config, | ||
| MobilityResponseCB | mobility_response_publisher, | ||
| LaneChangeStatusCB | lc_status_publisher | ||
| ) |
Constructor.
- Parameters
-
wm Pointer to intialized instance of the carma world model for accessing semantic map data config The configuration to be used for this object mobility_response_publisher Callback which will publish the mobility response lc_status_publisher Callback which will publish the cooperative lane change status
Definition at line 49 of file yield_plugin.cpp.
Member Function Documentation
◆ bsm_cb()
| void yield_plugin::YieldPlugin::bsm_cb | ( | const carma_v2x_msgs::msg::BSM::UniquePtr | msg | ) |
callback for bsm message
- Parameters
-
msg mobility bsm message
Definition at line 250 of file yield_plugin.cpp.
References bsmIDtoString(), and host_bsm_id_.
Referenced by yield_plugin::YieldPluginNode::on_configure_plugin().


◆ bsmIDtoString()
|
inlineprivate |
Definition at line 394 of file yield_plugin.hpp.
References process_bag::i, and carma_cooperative_perception::to_string().
Referenced by bsm_cb().


◆ check_traj_for_digital_min_gap()
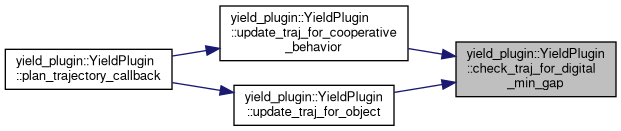
| double yield_plugin::YieldPlugin::check_traj_for_digital_min_gap | ( | const carma_planning_msgs::msg::TrajectoryPlan & | original_tp | ) | const |
checks trajectory for minimum gap associated with it from the road
- Parameters
-
original_tp original trajectory plan
- Returns
- minumum required min_gap from the road, if none exists, return default minimum_safety_gap_in_meters
Definition at line 1441 of file yield_plugin.cpp.
Referenced by update_traj_for_cooperative_behavior(), and update_traj_for_object().
◆ compose_mobility_response()
| carma_v2x_msgs::msg::MobilityResponse yield_plugin::YieldPlugin::compose_mobility_response | ( | const std::string & | resp_recipient_id, |
| const std::string & | req_plan_id, | ||
| bool | response | ||
| ) | const |
compose a mobility response message
- Parameters
-
resp_recipient_id vehicle id of the recipient of the message req_plan_id plan id from the requested message response accept/reject to the response based on conditions
- Returns
- filled mobility response
Definition at line 137 of file yield_plugin.cpp.
References YieldPluginConfig::always_accept_mobility_request, config_, host_bsm_id_, nh_, and YieldPluginConfig::vehicle_id.
Referenced by mobilityrequest_cb().

◆ convert_eceftrajectory_to_mappoints()
| std::vector< lanelet::BasicPoint2d > yield_plugin::YieldPlugin::convert_eceftrajectory_to_mappoints | ( | const carma_v2x_msgs::msg::Trajectory & | ecef_trajectory | ) | const |
convert a carma trajectory from ecef frame to map frame ecef trajectory consists of the point and a set of offsets with reference to the point
- Parameters
-
ecef_trajectory carma trajectory (ecef frame)
- Returns
- vector of 2d points in map frame
Definition at line 98 of file yield_plugin.cpp.
References ecef_to_map_point(), process_bag::first_point, and process_bag::i.
Referenced by mobilityrequest_cb().


◆ detect_trajectories_intersection()
| std::vector< std::pair< int, lanelet::BasicPoint2d > > yield_plugin::YieldPlugin::detect_trajectories_intersection | ( | std::vector< lanelet::BasicPoint2d > | self_trajectory, |
| std::vector< lanelet::BasicPoint2d > | incoming_trajectory | ||
| ) | const |
detect intersection point(s) of two trajectories
- Parameters
-
self_trajectory vector of 2d trajectory points incoming_trajectory vector of 2d trajectory points
- Returns
- vector of pairs of 2d intersection points and index of the point in trajectory array
Definition at line 77 of file yield_plugin.cpp.
References config_, process_bag::i, and YieldPluginConfig::intervehicle_collision_distance_in_m.
Referenced by update_traj_for_cooperative_behavior().

◆ ecef_to_map_point()
| lanelet::BasicPoint2d yield_plugin::YieldPlugin::ecef_to_map_point | ( | const carma_v2x_msgs::msg::LocationECEF & | ecef_point | ) | const |
convert a point in ecef frame (in cm) into map frame (in meters)
- Parameters
-
ecef_point carma point ecef frame in cm map_in_earth translate frame
- Returns
- 2d point in map frame
Definition at line 123 of file yield_plugin.cpp.
References map_projector_.
Referenced by convert_eceftrajectory_to_mappoints().

◆ find_on_route_in_predictions()
|
private |
Check whether any predicted state of an object falls within the route lanelet polygons.
- Parameters
-
predictions list of predicted states for an object stride step size used to iterate over predictions zero_speed if true, only the first prediction is checked (object is stationary)
- Returns
- pair of (true, index of first on-route prediction) if found, otherwise (false, 0)
Definition at line 910 of file yield_plugin.cpp.
References process_traj_logs::point, and route_llt_polygons_.
Referenced by get_collision_times_concurrently_cuda().

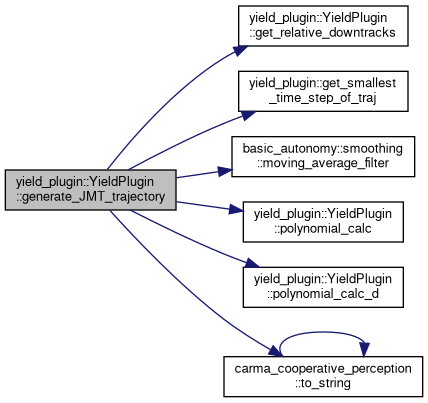
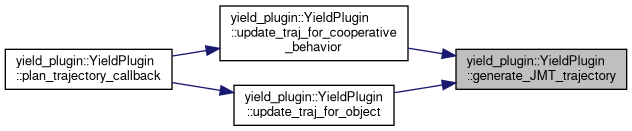
◆ generate_JMT_trajectory()
| carma_planning_msgs::msg::TrajectoryPlan yield_plugin::YieldPlugin::generate_JMT_trajectory | ( | const carma_planning_msgs::msg::TrajectoryPlan & | original_tp, |
| double | initial_pos, | ||
| double | goal_pos, | ||
| double | initial_velocity, | ||
| double | goal_velocity, | ||
| double | planning_time, | ||
| double | original_max_speed | ||
| ) |
generate a Jerk Minimizing Trajectory(JMT) with the provided start and end conditions
- Parameters
-
original_tp original trajectory plan intial_pos start position goal_pos final position initial_velocity start velocity goal_velocity end velocity planning_time time duration of the planning original original_max_speed from original_tp up until the goal_pos portion NOTE: the function would generate trajectory duration arbitrarily high if stopping motion is needed. This is to keep the original trajectory's shape in terms of location so that the vehicle steers toward the direction of travel even when stopping.
- Returns
- updated JMT trajectory
Definition at line 469 of file yield_plugin.cpp.
References config_, EPSILON, get_relative_downtracks(), yield_plugin::get_smallest_time_step_of_traj(), process_bag::i, last_speed_, last_speed_time_, YieldPluginConfig::max_stop_speed_in_ms, basic_autonomy::smoothing::moving_average_filter(), nh_, polynomial_calc(), polynomial_calc_d(), and YieldPluginConfig::speed_moving_average_window_size.
Referenced by update_traj_for_cooperative_behavior(), and update_traj_for_object().
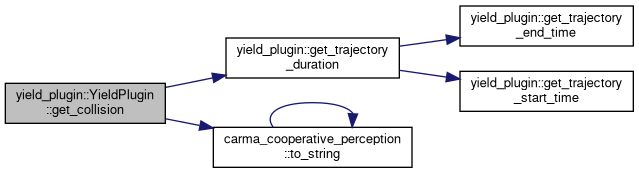
◆ get_collision()
| std::optional< GetCollisionResult > yield_plugin::YieldPlugin::get_collision | ( | const carma_planning_msgs::msg::TrajectoryPlan & | ego_trajectory, |
| const std::vector< carma_perception_msgs::msg::PredictedState > & | object_predictions, | ||
| double | collision_radius, | ||
| double | ego_max_speed | ||
| ) |
Return naive collision time and locations based on collision radius given two trajectories with one being obstacle's predicted steps.
- Parameters
-
ego_trajectory trajectory of the ego vehicle object_predictions trajectory of predicted steps collision_radius a distance to check between two trajectory points at a same timestamp that is considered a collision ego_max_speed max speed of the ego_trajectory to efficiently traverse through possible collision combination of the two trajectories NOTE: Currently object_predictions is assumed to be a simple cv model to save computational performance NOTE: Collisions are based on only collision radius at the same predicted time even if ego vehicle maybe past the obstacle. To filter these cases, see is_object_behind_vehicle()
- Returns
- data of time of collision if detected, otherwise, std::nullopt
Definition at line 624 of file yield_plugin.cpp.
References YieldPluginConfig::collision_check_radius_in_m, yield_plugin::GetCollisionResult::collision_time, config_, yield_plugin::GetCollisionResult::ego_point, yield_plugin::get_trajectory_duration(), process_bag::i, YieldPluginConfig::intervehicle_collision_distance_in_m, nh_, yield_plugin::GetCollisionResult::object_point, YieldPluginConfig::obstacle_zero_speed_threshold_in_ms, process_traj_logs::point, route_llt_polygons_, and carma_cooperative_perception::to_string().
Referenced by get_collision_time().

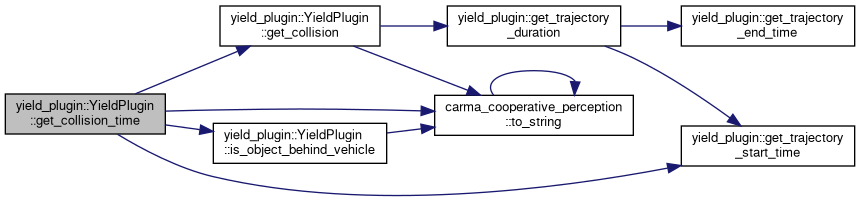
◆ get_collision_time()
| std::optional< rclcpp::Time > yield_plugin::YieldPlugin::get_collision_time | ( | const carma_planning_msgs::msg::TrajectoryPlan & | original_tp, |
| const carma_perception_msgs::msg::ExternalObject & | curr_obstacle, | ||
| double | original_tp_max_speed | ||
| ) |
Return collision time given two trajectories with one being external object with predicted steps.
- Parameters
-
original_tp trajectory of the ego vehicle curr_obstacle trajectory of the obstacle original_tp_max_speed max speed of the original_tp to efficiently traverse through possible collision combination of the two trajectories NOTE: Currently curr_obstacle is assumed to be using a simple cv model to save computational performance
- Returns
- time_of_collision if collision detected, otherwise, std::nullopt
Definition at line 805 of file yield_plugin.cpp.
References config_, consecutive_clearance_count_for_obstacles_, get_collision(), yield_plugin::get_trajectory_start_time(), YieldPluginConfig::intervehicle_collision_distance_in_m, is_object_behind_vehicle(), nh_, carma_cooperative_perception::to_string(), and wm_.
Referenced by get_collision_times_concurrently_cpu().

◆ get_collision_times_concurrently()
| std::unordered_map< uint32_t, rclcpp::Time > yield_plugin::YieldPlugin::get_collision_times_concurrently | ( | const carma_planning_msgs::msg::TrajectoryPlan & | original_tp, |
| const std::vector< carma_perception_msgs::msg::ExternalObject > & | external_objects, | ||
| double | original_tp_max_speed | ||
| ) |
Given the list of objects with predicted states, get all collision times concurrently using multi-threading.
- Parameters
-
original_tp trajectory of the ego vehicle external_objects list of external objects with predicted states original_tp_max_speed max speed of the original_tp to efficiently traverse through possible collision combination of the two trajectories
- Returns
- mapping of objects' ids and their corresponding collision times (non-colliding objects are omitted)
Definition at line 927 of file yield_plugin.cpp.
References get_collision_times_concurrently_cpu(), and get_collision_times_concurrently_cuda().
Referenced by get_earliest_collision_object_and_time().


◆ get_collision_times_concurrently_cpu()
|
private |
CPU implementation of get_collision_times_concurrently. Launches one thread per external object and computes get_collision_time for each in parallel.
- Parameters
-
original_tp trajectory of the ego vehicle external_objects list of external objects with predicted states original_tp_max_speed max speed of the original_tp to efficiently traverse through possible collision combination of the two trajectories
- Returns
- mapping of objects' ids and their corresponding collision times (non-colliding objects are omitted)
Definition at line 937 of file yield_plugin.cpp.
References get_collision_time().
Referenced by get_collision_times_concurrently(), and get_collision_times_concurrently_cuda().


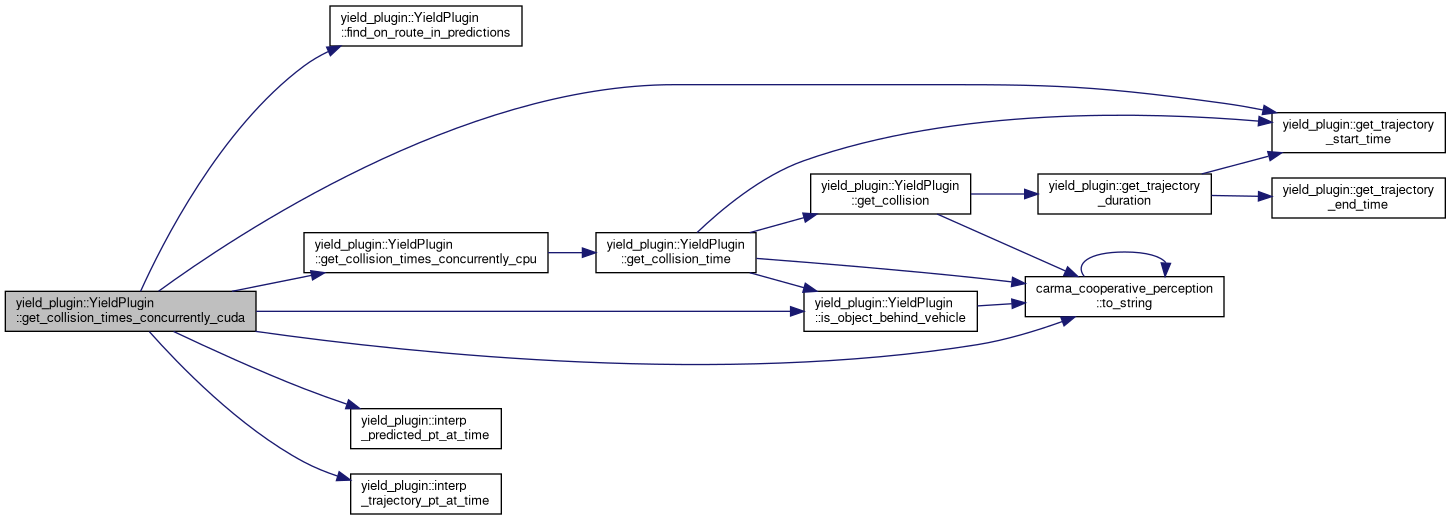
◆ get_collision_times_concurrently_cuda()
|
private |
CUDA implementation of get_collision_times_concurrently. Filters objects to those with on-route predictions, then batches the collision check across all objects on the GPU. Falls back to get_collision_times_concurrently_cpu if no CUDA device is available or on error.
- Parameters
-
original_tp trajectory of the ego vehicle external_objects list of external objects with predicted states original_tp_max_speed max speed of the original_tp to efficiently traverse through possible collision combination of the two trajectories
- Returns
- mapping of objects' ids and their corresponding collision times (non-colliding objects are omitted)
Definition at line 967 of file yield_plugin.cpp.
References YieldPluginConfig::collision_check_radius_in_m, config_, consecutive_clearance_count_for_obstacles_, find_on_route_in_predictions(), get_collision_times_concurrently_cpu(), yield_plugin::get_trajectory_start_time(), yield_plugin::interp_predicted_pt_at_time(), yield_plugin::interp_trajectory_pt_at_time(), YieldPluginConfig::intervehicle_collision_distance_in_m, is_object_behind_vehicle(), nh_, YieldPluginConfig::obstacle_zero_speed_threshold_in_ms, carma_cooperative_perception::to_string(), and wm_.
Referenced by get_collision_times_concurrently().

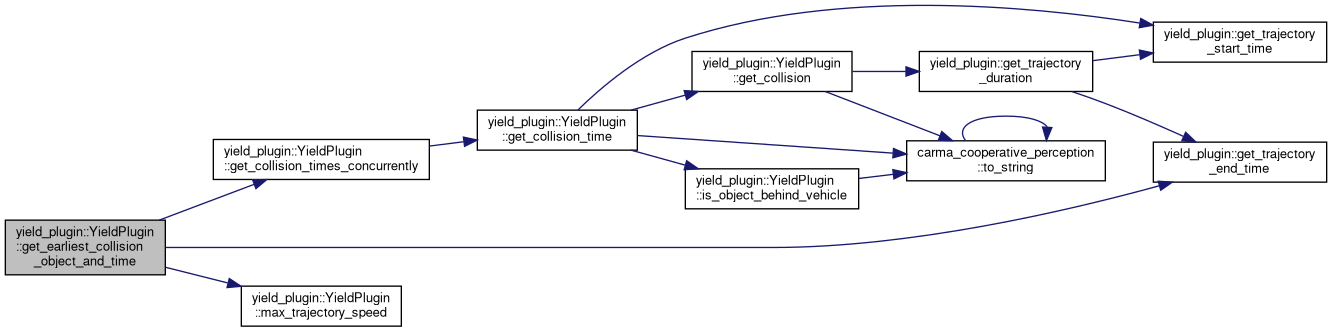
◆ get_earliest_collision_object_and_time()
| std::optional< std::pair< carma_perception_msgs::msg::ExternalObject, double > > yield_plugin::YieldPlugin::get_earliest_collision_object_and_time | ( | const carma_planning_msgs::msg::TrajectoryPlan & | original_tp, |
| const std::vector< carma_perception_msgs::msg::ExternalObject > & | external_objects | ||
| ) |
Return the earliest collision object and time of collision pair from the given trajectory and list of external objects with predicted states. Function first filters obstacles based on whether if their any of predicted state will be on the route. Only then, the logic compares trajectory and predicted states.
- Parameters
-
original_tp trajectory of the ego vehicle external_objects list of external objects with predicted states
- Returns
- earliest collision object and its collision time if collision detected. std::nullopt if no collision is detected or if route is not available.
Definition at line 1180 of file yield_plugin.cpp.
References get_collision_times_concurrently(), yield_plugin::get_trajectory_end_time(), max_trajectory_speed(), nh_, route_llt_polygons_, update_route_llt_cache(), and wm_.
Referenced by update_traj_for_object().

◆ get_predicted_velocity_at_time()
| double yield_plugin::YieldPlugin::get_predicted_velocity_at_time | ( | const geometry_msgs::msg::Twist & | object_velocity_in_map_frame, |
| const carma_planning_msgs::msg::TrajectoryPlan & | original_tp, | ||
| double | timestamp_in_sec_to_predict | ||
| ) |
Given the object velocity in map frame with x,y components, this function returns the projected velocity along the trajectory at given time.
- Parameters
-
object_velocity_in_map_frame trajectory of the ego vehicle original_tp trajectory of the ego vehicle timestamp_in_sec_to_predict timestamp in seconds along the trajectory to return the projected velocity NOTE: returns the last point's speed if the specified time is past the trajectory's planning time
- Returns
- get_predicted_velocity_at_time
Definition at line 1221 of file yield_plugin.cpp.
References visualize_xodr::dx, visualize_xodr::dy, yield_plugin::get_trajectory_end_time(), process_bag::i, nh_, and carma_cooperative_perception::to_string().
Referenced by update_traj_for_object().

◆ get_relative_downtracks()
| std::vector< double > yield_plugin::YieldPlugin::get_relative_downtracks | ( | const carma_planning_msgs::msg::TrajectoryPlan & | trajectory_plan | ) | const |
calculates distance between trajectory points in a plan
- Parameters
-
trajectory_plan input trajectory plan
- Returns
- vector of relative distances between trajectory points
Definition at line 1381 of file yield_plugin.cpp.
References visualize_xodr::dx, visualize_xodr::dy, and process_bag::i.
Referenced by generate_JMT_trajectory().

◆ is_object_behind_vehicle()
| bool yield_plugin::YieldPlugin::is_object_behind_vehicle | ( | uint32_t | object_id, |
| const rclcpp::Time & | collision_time, | ||
| double | vehicle_point, | ||
| double | object_downtrack | ||
| ) |
Check if object location is behind the vehicle using estimates of the vehicle's length and route downtracks.
- Parameters
-
object_id object id to use for the consecutive_clearance_count_for_obstacles_ collision_time predicted time of collision vehicle_downtrack at the time of collision object_downtrack at the time of collision NOTE: Uses internal counter low pass filter to confirm the object is behind only if it counted continuously above config_.consecutive_clearance_count_for_passed_obstacles_threshold
- Returns
- return true if object is behind the vehicle
Definition at line 779 of file yield_plugin.cpp.
References config_, consecutive_clearance_count_for_obstacles_, YieldPluginConfig::consecutive_clearance_count_for_passed_obstacles_threshold, nh_, carma_cooperative_perception::to_string(), and YieldPluginConfig::vehicle_length.
Referenced by get_collision_time(), and get_collision_times_concurrently_cuda().


◆ lookup_ecef_to_map_transform()
| void yield_plugin::YieldPlugin::lookup_ecef_to_map_transform | ( | ) |
Looks up the transform between map and earth frames, and sets the member variable.
◆ max_trajectory_speed()
| double yield_plugin::YieldPlugin::max_trajectory_speed | ( | const std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > & | trajectory_points, |
| double | timestamp_in_sec_to_search_until | ||
| ) | const |
calculates the maximum speed in a set of tajectory points
- Parameters
-
trajectory_points trajectory points
\param timestamp_in_sec_to_search_until before which to look for max trajectory speed
- Returns
- maximum speed
Definition at line 1418 of file yield_plugin.cpp.
References visualize_xodr::dx, visualize_xodr::dy, and process_bag::i.
Referenced by get_earliest_collision_object_and_time(), update_traj_for_cooperative_behavior(), and update_traj_for_object().
◆ mobilityrequest_cb()
| void yield_plugin::YieldPlugin::mobilityrequest_cb | ( | const carma_v2x_msgs::msg::MobilityRequest::UniquePtr | msg | ) |
callback for mobility request
- Parameters
-
msg mobility request message
Definition at line 157 of file yield_plugin.cpp.
References clc_urgency_, compose_mobility_response(), config_, convert_eceftrajectory_to_mappoints(), cooperative_request_acceptable_, lc_status_publisher_, map_projector_, YieldPluginConfig::min_obj_avoidance_plan_time_in_s, mobility_response_publisher_, nh_, set_incoming_request_info(), timesteps_since_last_req_, and YieldPluginConfig::vehicle_id.
Referenced by yield_plugin::YieldPluginNode::on_configure_plugin().

◆ plan_trajectory_callback()
| void yield_plugin::YieldPlugin::plan_trajectory_callback | ( | carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr | req, |
| carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr | resp | ||
| ) |
Service callback for trajectory planning.
- Parameters
-
srv_header header req The service request resp The service response
Definition at line 256 of file yield_plugin.cpp.
References YieldPluginConfig::acceptable_passed_timesteps, YieldPluginConfig::acceptable_urgency, clc_urgency_, config_, YieldPluginConfig::enable_cooperative_behavior, EPSILON, external_objects_, first_time_stopped_to_prevent_collision_, basic_autonomy::waypoint_generation::get_nearest_point_index(), yield_plugin::get_trajectory_end_time(), last_traj_plan_committed_to_stopping_, nh_, timesteps_since_last_req_, carma_cooperative_perception::to_string(), update_traj_for_cooperative_behavior(), and update_traj_for_object().
◆ polynomial_calc()
| double yield_plugin::YieldPlugin::polynomial_calc | ( | std::vector< double > | coeff, |
| double | x | ||
| ) | const |
calculate quintic polynomial equation for a given x
- Parameters
-
coeff vector including polynomial coefficiencrs x input variable to the polynomial
- Returns
- value of polynomial for given input
Definition at line 1396 of file yield_plugin.cpp.
References process_bag::i, and osm_transform::x.
Referenced by generate_JMT_trajectory().

◆ polynomial_calc_d()
| double yield_plugin::YieldPlugin::polynomial_calc_d | ( | std::vector< double > | coeff, |
| double | x | ||
| ) | const |
calculate derivative of quintic polynomial equation for a given x
- Parameters
-
coeff vector including polynomial coefficiencrs x input variable to the polynomial
- Returns
- value of derivative polynomial for given input
Definition at line 1407 of file yield_plugin.cpp.
References process_bag::i, and osm_transform::x.
Referenced by generate_JMT_trajectory().

◆ set_external_objects()
| void yield_plugin::YieldPlugin::set_external_objects | ( | const std::vector< carma_perception_msgs::msg::ExternalObject > & | object_list | ) |
Setter for external objects with predictions in the environment.
- Parameters
-
object_list The object list.
Definition at line 1518 of file yield_plugin.cpp.
References external_objects_.
◆ set_georeference_string()
| void yield_plugin::YieldPlugin::set_georeference_string | ( | const std::string & | georeference | ) |
Setter for map projection string to define lat/lon -> map conversion.
- Parameters
-
georeference The proj string defining the projection.
Definition at line 1509 of file yield_plugin.cpp.
References georeference_, and map_projector_.
◆ set_incoming_request_info()
| void yield_plugin::YieldPlugin::set_incoming_request_info | ( | std::vector< lanelet::BasicPoint2d > | req_trajectory, |
| double | req_speed, | ||
| double | req_planning_time, | ||
| double | req_timestamp | ||
| ) |
set values for member variables related to cooperative behavior
- Parameters
-
req_trajectory requested trajectory req_speed speed of requested cooperative behavior req_planning_time planning time for the requested cooperative behavior req_timestamp the mobility request time stamp
Definition at line 241 of file yield_plugin.cpp.
References nh_, req_target_plan_time_, req_target_speed_, req_timestamp_, and req_trajectory_points_.
Referenced by mobilityrequest_cb().

◆ update_route_llt_cache()
| void yield_plugin::YieldPlugin::update_route_llt_cache | ( | ) |
Rebuild the cached route lanelet polygons and IDs from the current route. Should be called once whenever the route changes via setRouteCallback().
Definition at line 1523 of file yield_plugin.cpp.
References nh_, route_llt_ids_, route_llt_polygons_, and wm_.
Referenced by get_earliest_collision_object_and_time().

◆ update_traj_for_cooperative_behavior()
| carma_planning_msgs::msg::TrajectoryPlan yield_plugin::YieldPlugin::update_traj_for_cooperative_behavior | ( | const carma_planning_msgs::msg::TrajectoryPlan & | original_tp, |
| double | current_speed | ||
| ) |
update trajectory for yielding to an incoming cooperative behavior
- Parameters
-
original_tp original trajectory plan current_speed current speed of the vehicle
- Returns
- updated trajectory for cooperative behavior
Definition at line 384 of file yield_plugin.cpp.
References check_traj_for_digital_min_gap(), config_, cooperative_request_acceptable_, detect_trajectories_intersection(), visualize_xodr::dx, visualize_xodr::dy, ecef_traj_timestep_, generate_JMT_trajectory(), yield_plugin::get_trajectory_end_time(), process_bag::i, max_trajectory_speed(), YieldPluginConfig::minimum_safety_gap_in_meters, nh_, req_target_plan_time_, req_target_speed_, req_timestamp_, req_trajectory_points_, YieldPluginConfig::safety_collision_time_gap_in_s, and YieldPluginConfig::yield_max_deceleration_in_ms2.
Referenced by plan_trajectory_callback().

◆ update_traj_for_object()
| carma_planning_msgs::msg::TrajectoryPlan yield_plugin::YieldPlugin::update_traj_for_object | ( | const carma_planning_msgs::msg::TrajectoryPlan & | original_tp, |
| const std::vector< carma_perception_msgs::msg::ExternalObject > & | external_objects, | ||
| double | initial_velocity | ||
| ) |
trajectory is modified to safely avoid obstacles on the road
- Parameters
-
original_tp original trajectory plan without object avoidance current_speed_ current speed of the vehicle
return modified trajectory plan
Definition at line 1264 of file yield_plugin.cpp.
References YieldPluginConfig::acceleration_adjustment_factor, check_traj_for_digital_min_gap(), config_, YieldPluginConfig::enable_adjustable_gap, EPSILON, generate_JMT_trajectory(), get_earliest_collision_object_and_time(), get_predicted_velocity_at_time(), last_traj_plan_committed_to_stopping_, max_trajectory_speed(), YieldPluginConfig::min_obj_avoidance_plan_time_in_s, YieldPluginConfig::minimum_safety_gap_in_meters, nh_, YieldPluginConfig::obstacle_zero_speed_threshold_in_ms, YieldPluginConfig::time_horizon_until_collision_to_commit_to_stop_in_s, YieldPluginConfig::vehicle_length, wm_, and YieldPluginConfig::yield_max_deceleration_in_ms2.
Referenced by plan_trajectory_callback().

Member Data Documentation
◆ clc_urgency_
|
private |
Definition at line 377 of file yield_plugin.hpp.
Referenced by mobilityrequest_cb(), and plan_trajectory_callback().
◆ config_
|
private |
Definition at line 358 of file yield_plugin.hpp.
Referenced by compose_mobility_response(), detect_trajectories_intersection(), generate_JMT_trajectory(), get_collision(), get_collision_time(), get_collision_times_concurrently_cuda(), is_object_behind_vehicle(), mobilityrequest_cb(), plan_trajectory_callback(), update_traj_for_cooperative_behavior(), and update_traj_for_object().
◆ consecutive_clearance_count_for_obstacles_
|
private |
Definition at line 367 of file yield_plugin.hpp.
Referenced by get_collision_time(), get_collision_times_concurrently_cuda(), and is_object_behind_vehicle().
◆ cooperative_request_acceptable_
|
private |
Definition at line 369 of file yield_plugin.hpp.
Referenced by mobilityrequest_cb(), and update_traj_for_cooperative_behavior().
◆ current_speed_
|
private |
Definition at line 387 of file yield_plugin.hpp.
◆ ecef_traj_timestep_
|
private |
Definition at line 384 of file yield_plugin.hpp.
Referenced by update_traj_for_cooperative_behavior().
◆ external_objects_
|
private |
Definition at line 366 of file yield_plugin.hpp.
Referenced by plan_trajectory_callback(), and set_external_objects().
◆ first_time_stopped_to_prevent_collision_
|
private |
Definition at line 380 of file yield_plugin.hpp.
Referenced by plan_trajectory_callback().
◆ georeference_
|
private |
Definition at line 391 of file yield_plugin.hpp.
Referenced by set_georeference_string().
◆ host_bsm_id_
|
private |
Definition at line 389 of file yield_plugin.hpp.
Referenced by bsm_cb(), and compose_mobility_response().
◆ host_vehicle_size
|
private |
Definition at line 386 of file yield_plugin.hpp.
◆ last_speed_
|
private |
Definition at line 378 of file yield_plugin.hpp.
Referenced by generate_JMT_trajectory().
◆ last_speed_time_
|
private |
Definition at line 379 of file yield_plugin.hpp.
Referenced by generate_JMT_trajectory().
◆ last_traj_plan_committed_to_stopping_
|
private |
Definition at line 382 of file yield_plugin.hpp.
Referenced by plan_trajectory_callback(), and update_traj_for_object().
◆ lc_status_publisher_
|
private |
Definition at line 360 of file yield_plugin.hpp.
Referenced by mobilityrequest_cb().
◆ map_projector_
|
private |
Definition at line 392 of file yield_plugin.hpp.
Referenced by ecef_to_map_point(), mobilityrequest_cb(), and set_georeference_string().
◆ mobility_response_publisher_
|
private |
Definition at line 359 of file yield_plugin.hpp.
Referenced by mobilityrequest_cb().
◆ nh_
|
private |
Definition at line 361 of file yield_plugin.hpp.
Referenced by check_traj_for_digital_min_gap(), compose_mobility_response(), generate_JMT_trajectory(), get_collision(), get_collision_time(), get_collision_times_concurrently_cuda(), get_earliest_collision_object_and_time(), get_predicted_velocity_at_time(), is_object_behind_vehicle(), mobilityrequest_cb(), plan_trajectory_callback(), set_incoming_request_info(), update_route_llt_cache(), update_traj_for_cooperative_behavior(), and update_traj_for_object().
◆ previous_llt_id_
|
private |
Definition at line 365 of file yield_plugin.hpp.
◆ req_target_plan_time_
|
private |
Definition at line 375 of file yield_plugin.hpp.
Referenced by set_incoming_request_info(), and update_traj_for_cooperative_behavior().
◆ req_target_speed_
|
private |
Definition at line 373 of file yield_plugin.hpp.
Referenced by set_incoming_request_info(), and update_traj_for_cooperative_behavior().
◆ req_timestamp_
|
private |
Definition at line 374 of file yield_plugin.hpp.
Referenced by set_incoming_request_info(), and update_traj_for_cooperative_behavior().
◆ req_trajectory_points_
|
private |
Definition at line 372 of file yield_plugin.hpp.
Referenced by set_incoming_request_info(), and update_traj_for_cooperative_behavior().
◆ route_llt_ids_
|
private |
Definition at line 362 of file yield_plugin.hpp.
Referenced by update_route_llt_cache().
◆ route_llt_polygons_
|
private |
Definition at line 364 of file yield_plugin.hpp.
Referenced by find_on_route_in_predictions(), get_collision(), get_earliest_collision_object_and_time(), and update_route_llt_cache().
◆ timesteps_since_last_req_
|
private |
Definition at line 376 of file yield_plugin.hpp.
Referenced by mobilityrequest_cb(), and plan_trajectory_callback().
◆ wm_
|
private |
Definition at line 357 of file yield_plugin.hpp.
Referenced by check_traj_for_digital_min_gap(), get_collision_time(), get_collision_times_concurrently_cuda(), get_earliest_collision_object_and_time(), update_route_llt_cache(), and update_traj_for_object().
The documentation for this class was generated from the following files:
- yield_plugin/include/yield_plugin/yield_plugin.hpp
- yield_plugin/src/yield_plugin.cpp