#include <stop_and_wait_plugin.hpp>
Public Member Functions | |
| StopandWait (std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > nh, carma_wm::WorldModelConstPtr wm, const StopandWaitConfig &config, const std::string &plugin_name, const std::string &version_id) | |
| Constructor. More... | |
| bool | plan_trajectory_cb (carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr req, carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr resp) |
| Service callback for trajectory planning. More... | |
| std::vector< PointSpeedPair > | maneuvers_to_points (const std::vector< carma_planning_msgs::msg::Maneuver > &maneuvers, const carma_wm::WorldModelConstPtr &wm, const carma_planning_msgs::msg::VehicleState &state) |
| Converts a set of requested STOP_AND_WAIT maneuvers to point speed limit pairs. More... | |
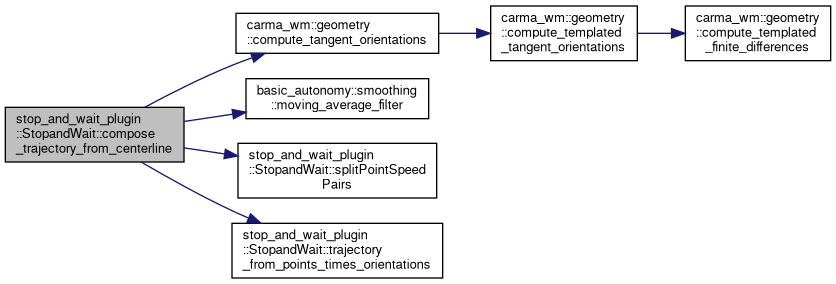
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > | compose_trajectory_from_centerline (const std::vector< PointSpeedPair > &points, double starting_downtrack, double starting_speed, double stop_location, double stop_location_buffer, rclcpp::Time start_time, double stopping_acceleration, double &initial_speed) |
| Method converts a list of lanelet centerline points and current vehicle state into a usable list of trajectory points for trajectory planning. More... | |
| void | splitPointSpeedPairs (const std::vector< PointSpeedPair > &points, std::vector< lanelet::BasicPoint2d > *basic_points, std::vector< double > *speeds) const |
| Helper method to split a list of PointSpeedPair into separate point and speed lists. More... | |
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > | trajectory_from_points_times_orientations (const std::vector< lanelet::BasicPoint2d > &points, const std::vector< double > ×, const std::vector< double > &yaws, rclcpp::Time startTime) |
| void | set_yield_client (carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > client) |
| set the yield service More... | |
Private Attributes | |
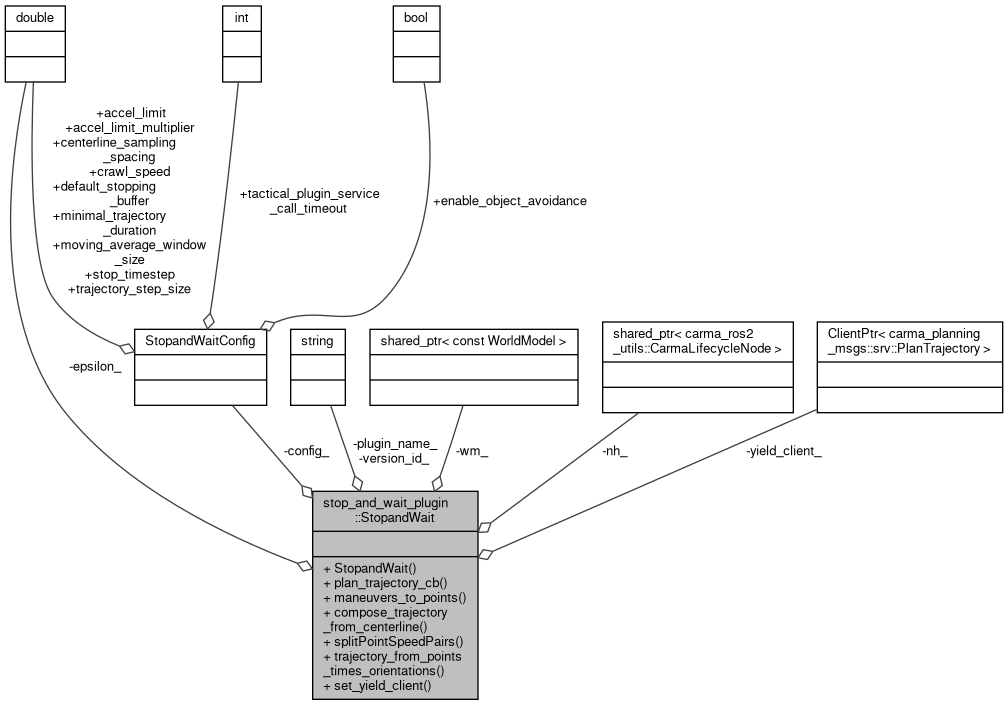
| double | epsilon_ = 0.001 |
| std::string | plugin_name_ |
| std::string | version_id_ |
| carma_wm::WorldModelConstPtr | wm_ |
| StopandWaitConfig | config_ |
| std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | nh_ |
| carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > | yield_client_ |
Detailed Description
Definition at line 50 of file stop_and_wait_plugin.hpp.
Constructor & Destructor Documentation
◆ StopandWait()
| stop_and_wait_plugin::StopandWait::StopandWait | ( | std::shared_ptr< carma_ros2_utils::CarmaLifecycleNode > | nh, |
| carma_wm::WorldModelConstPtr | wm, | ||
| const StopandWaitConfig & | config, | ||
| const std::string & | plugin_name, | ||
| const std::string & | version_id | ||
| ) |
Constructor.
Definition at line 51 of file stop_and_wait_plugin.cpp.
Member Function Documentation
◆ compose_trajectory_from_centerline()
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > stop_and_wait_plugin::StopandWait::compose_trajectory_from_centerline | ( | const std::vector< PointSpeedPair > & | points, |
| double | starting_downtrack, | ||
| double | starting_speed, | ||
| double | stop_location, | ||
| double | stop_location_buffer, | ||
| rclcpp::Time | start_time, | ||
| double | stopping_acceleration, | ||
| double & | initial_speed | ||
| ) |
Method converts a list of lanelet centerline points and current vehicle state into a usable list of trajectory points for trajectory planning.
- Parameters
-
points The set of points that define the current lane the vehicle is in and are defined based on the request planning maneuvers. These points must be in the same lane as the vehicle and must extend in front of it though it is fine if they also extend behind it. state The current state of the vehicle initial_speed Returns the initial_speed used to generate the trajectory
- Returns
- A list of trajectory points to send to the carma planning stack
Definition at line 233 of file stop_and_wait_plugin.cpp.
References StopandWaitConfig::accel_limit_multiplier, carma_wm::geometry::compute_tangent_orientations(), config_, StopandWaitConfig::crawl_speed, visualize_xodr::dx, process_bag::i, StopandWaitConfig::minimal_trajectory_duration, basic_autonomy::smoothing::moving_average_filter(), StopandWaitConfig::moving_average_window_size, nh_, plugin_name_, stop_and_wait_plugin::PointSpeedPair::point, stop_and_wait_plugin::PointSpeedPair::speed, splitPointSpeedPairs(), StopandWaitConfig::stop_timestep, and trajectory_from_points_times_orientations().
Referenced by plan_trajectory_cb().

◆ maneuvers_to_points()
| std::vector< PointSpeedPair > stop_and_wait_plugin::StopandWait::maneuvers_to_points | ( | const std::vector< carma_planning_msgs::msg::Maneuver > & | maneuvers, |
| const carma_wm::WorldModelConstPtr & | wm, | ||
| const carma_planning_msgs::msg::VehicleState & | state | ||
| ) |
Converts a set of requested STOP_AND_WAIT maneuvers to point speed limit pairs.
- Parameters
-
maneuvers The list of maneuvers to convert max_starting_downtrack The maximum downtrack that is allowed for the first maneuver. This should be set to the vehicle position or earlier. If the first maneuver exceeds this then it's downtrack will be shifted to this value.
ASSUMPTION: Since the vehicle is trying to stop the assumption made is that the speed limit is irrelevant. ASSUMPTION: The provided maneuver lies on the route shortest path
- Returns
- List of centerline points paired with speed limits. All output points will have speed matching state.logitudinal_velocity
Definition at line 169 of file stop_and_wait_plugin.cpp.
References StopandWaitConfig::centerline_sampling_spacing, config_, stop_and_wait_plugin::PointSpeedPair::point, stop_and_wait_plugin::PointSpeedPair::speed, and wm_.
Referenced by plan_trajectory_cb().

◆ plan_trajectory_cb()
| bool stop_and_wait_plugin::StopandWait::plan_trajectory_cb | ( | carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr | req, |
| carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr | resp | ||
| ) |
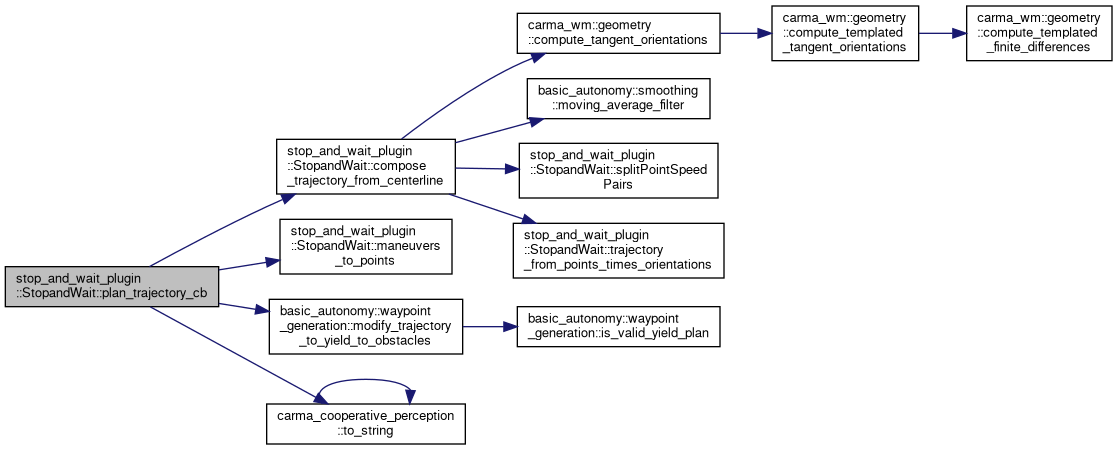
Service callback for trajectory planning.
- Parameters
-
req The service request resp The service response
- Returns
- True if success. False otherwise
Definition at line 59 of file stop_and_wait_plugin.cpp.
References compose_trajectory_from_centerline(), config_, StopandWaitConfig::default_stopping_buffer, StopandWaitConfig::enable_object_avoidance, epsilon_, maneuvers_to_points(), basic_autonomy::waypoint_generation::modify_trajectory_to_yield_to_obstacles(), nh_, StopandWaitConfig::tactical_plugin_service_call_timeout, carma_cooperative_perception::to_string(), wm_, and yield_client_.
◆ set_yield_client()
| void stop_and_wait_plugin::StopandWait::set_yield_client | ( | carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > | client | ) |
set the yield service
- Parameters
-
yield_srv input yield service
Definition at line 424 of file stop_and_wait_plugin.cpp.
References yield_client_.
◆ splitPointSpeedPairs()
| void stop_and_wait_plugin::StopandWait::splitPointSpeedPairs | ( | const std::vector< PointSpeedPair > & | points, |
| std::vector< lanelet::BasicPoint2d > * | basic_points, | ||
| std::vector< double > * | speeds | ||
| ) | const |
Helper method to split a list of PointSpeedPair into separate point and speed lists.
Definition at line 410 of file stop_and_wait_plugin.cpp.
Referenced by compose_trajectory_from_centerline().

◆ trajectory_from_points_times_orientations()
| std::vector< carma_planning_msgs::msg::TrajectoryPlanPoint > stop_and_wait_plugin::StopandWait::trajectory_from_points_times_orientations | ( | const std::vector< lanelet::BasicPoint2d > & | points, |
| const std::vector< double > & | times, | ||
| const std::vector< double > & | yaws, | ||
| rclcpp::Time | startTime | ||
| ) |
Definition at line 204 of file stop_and_wait_plugin.cpp.
References process_bag::i, and plugin_name_.
Referenced by compose_trajectory_from_centerline().

Member Data Documentation
◆ config_
|
private |
Definition at line 127 of file stop_and_wait_plugin.hpp.
Referenced by compose_trajectory_from_centerline(), maneuvers_to_points(), and plan_trajectory_cb().
◆ epsilon_
|
private |
Definition at line 121 of file stop_and_wait_plugin.hpp.
Referenced by plan_trajectory_cb().
◆ nh_
|
private |
Definition at line 128 of file stop_and_wait_plugin.hpp.
Referenced by compose_trajectory_from_centerline(), and plan_trajectory_cb().
◆ plugin_name_
|
private |
Definition at line 124 of file stop_and_wait_plugin.hpp.
Referenced by compose_trajectory_from_centerline(), and trajectory_from_points_times_orientations().
◆ version_id_
|
private |
Definition at line 125 of file stop_and_wait_plugin.hpp.
◆ wm_
|
private |
Definition at line 126 of file stop_and_wait_plugin.hpp.
Referenced by maneuvers_to_points(), and plan_trajectory_cb().
◆ yield_client_
|
private |
Definition at line 130 of file stop_and_wait_plugin.hpp.
Referenced by plan_trajectory_cb(), and set_yield_client().
The documentation for this class was generated from the following files:
- stop_and_wait_plugin/include/stop_and_wait_plugin.hpp
- stop_and_wait_plugin/src/stop_and_wait_plugin.cpp